

开疆智能Ethercat转CANopen网关连接COMBIVERT 驱动控制器配置案例
描述
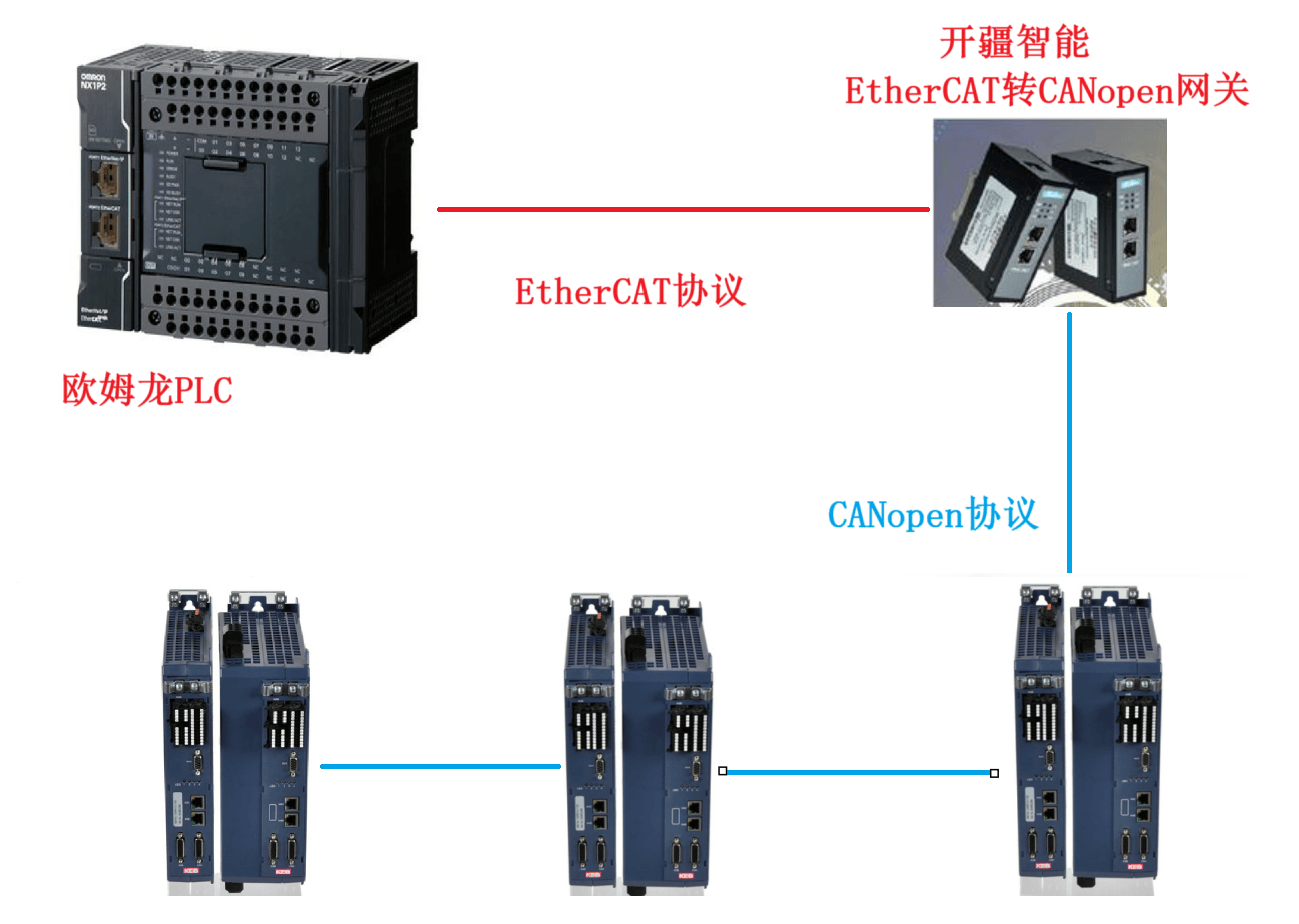
本案例是欧姆龙PLC通过EtherCAT转CANopen网关控制COMBIVERT驱动控制器的配置案例,具体方法如下。
配置过程:
欧姆龙PLC配置
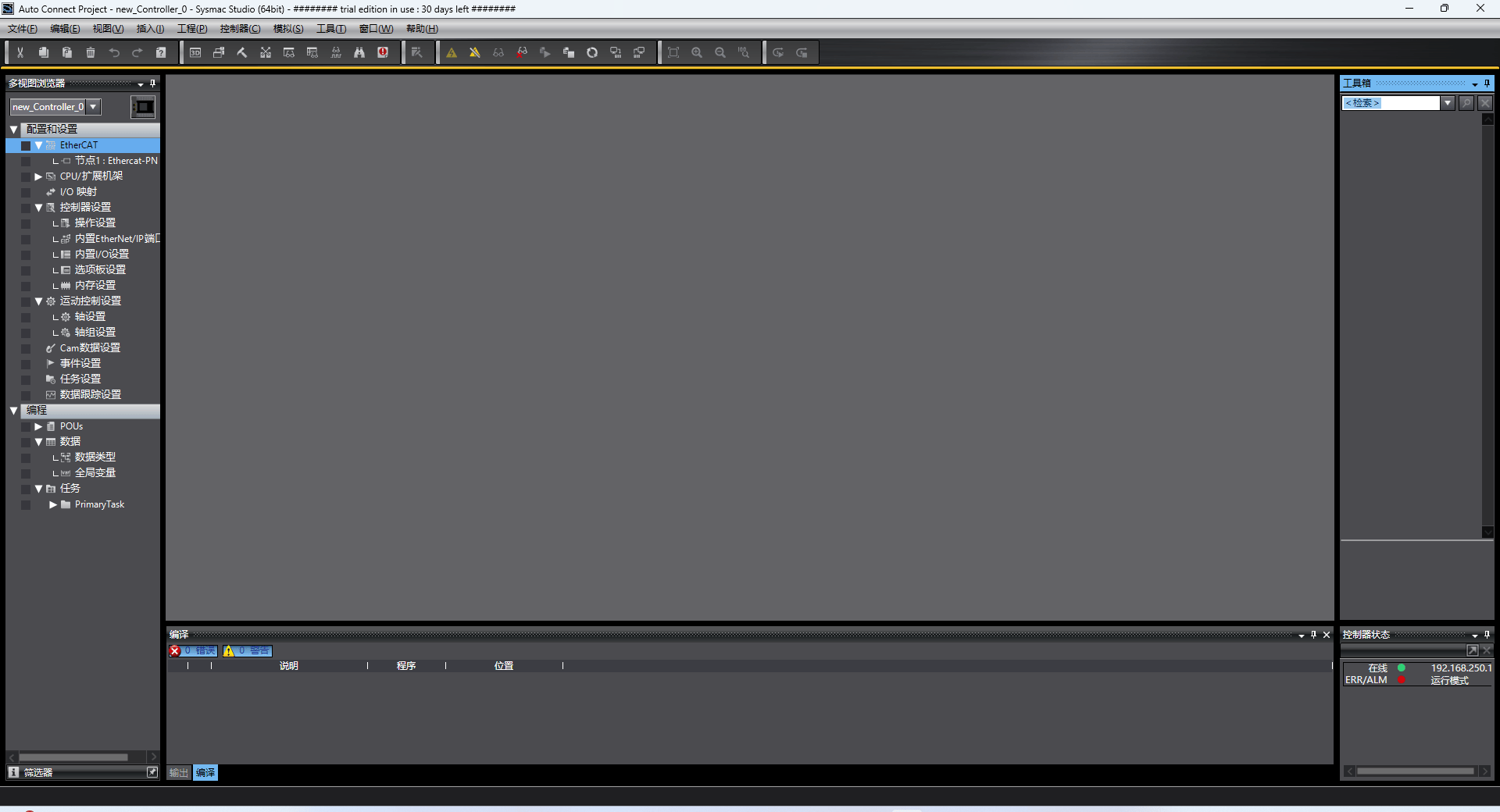
1. 打开欧姆龙配置软件Sysmac Studio
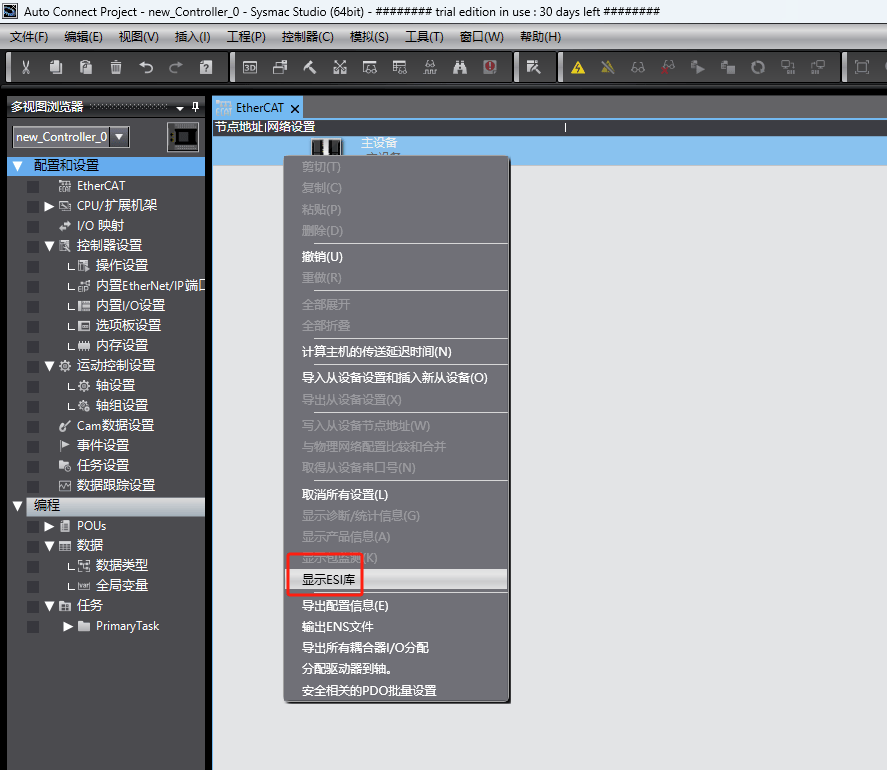
2. 双击EtherCAT,在主设备处右键选择显示ESI库
3. 在弹出的对话框中选择安装文件
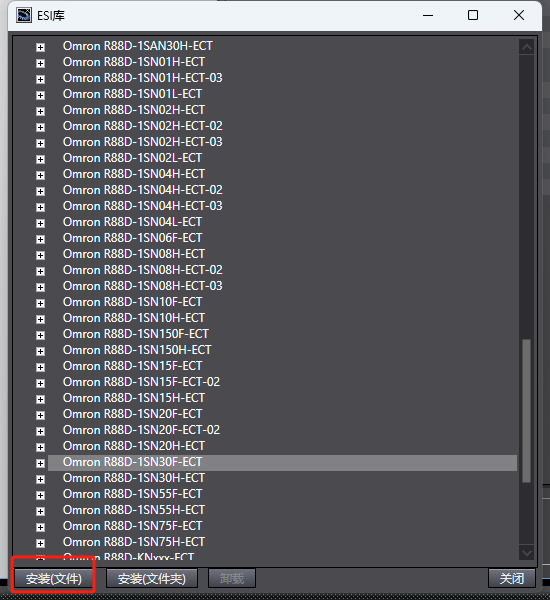
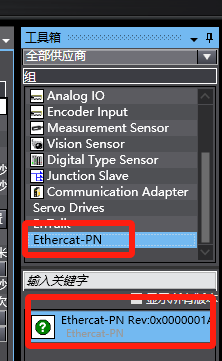
4. 选择网关的ESI文件
5. 添加完成后选择Ethercat-PN
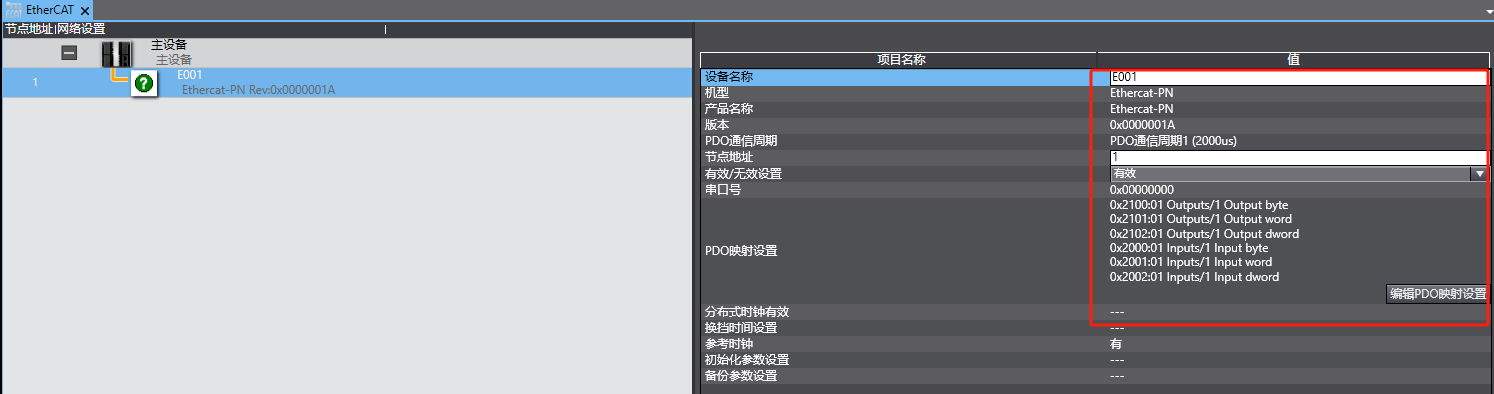
6. 1设置好网关参数
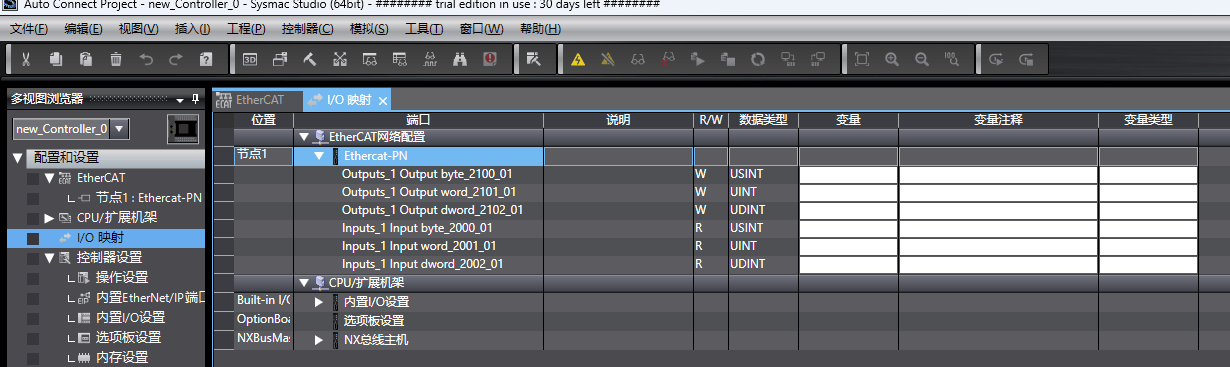
7. 打开IO映射设置好变量
8. 将PLC在线,在主站处右键选择与物理网络配置比较和合并
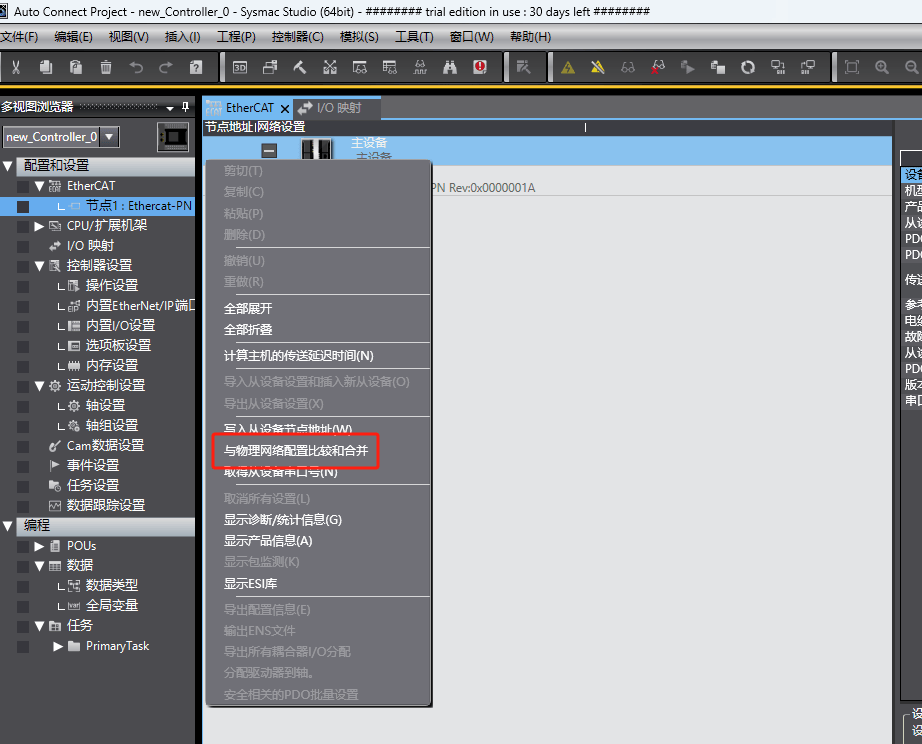
9. 完成后将组态下载至PLC
打开埃斯顿伺服配置手册,按照手册设置好伺服驱动器参数。
根据手册设定好驱动器的CANopen通讯参数比如波特率,站地址等。
网关配置
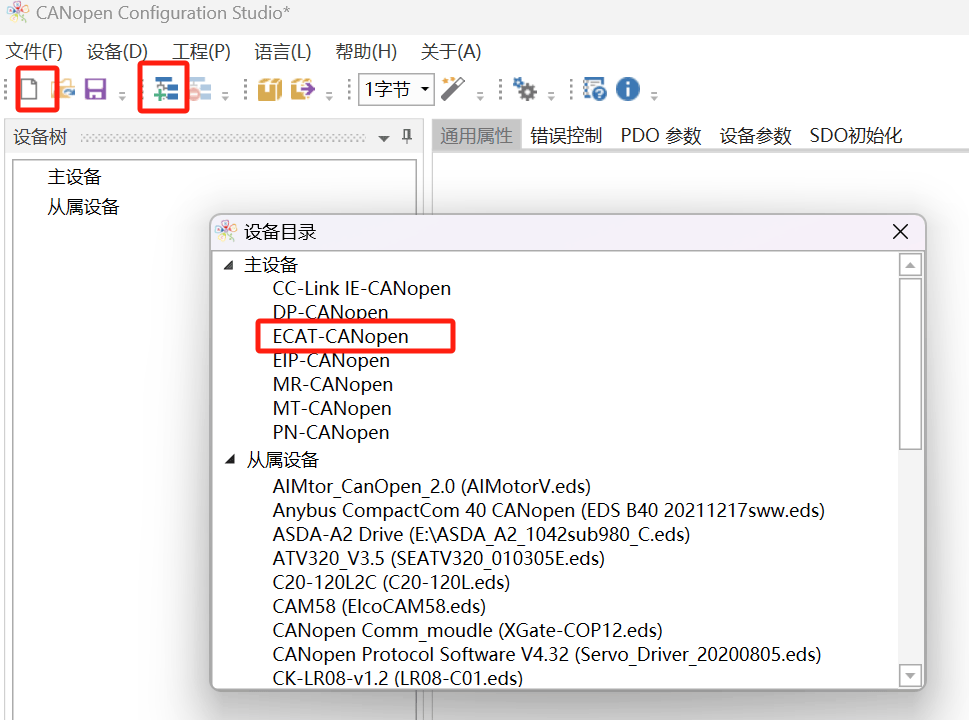
打开网关配置软件“CANopen Configuration Studio”对网关进行配置。
新建项目选择“ECAT-CANopen”
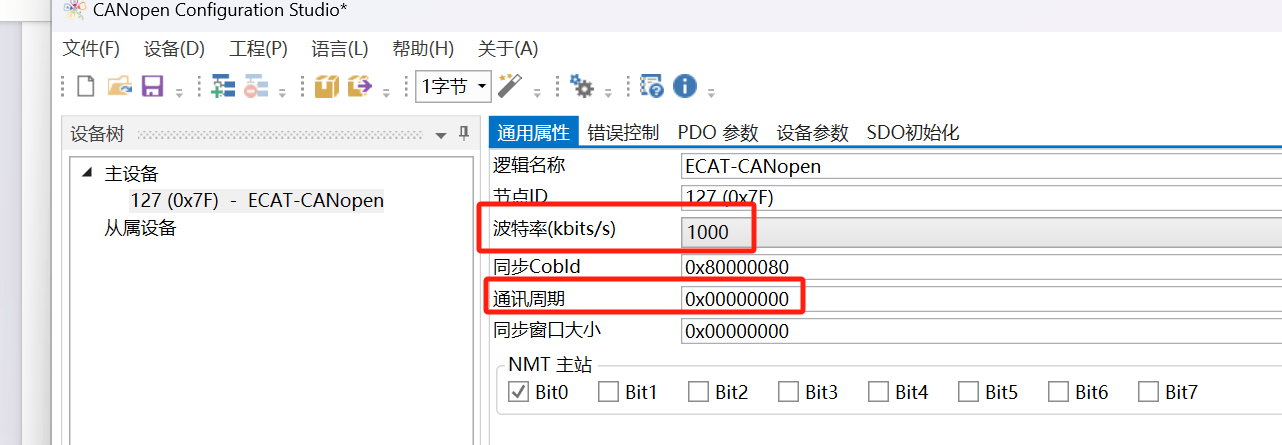
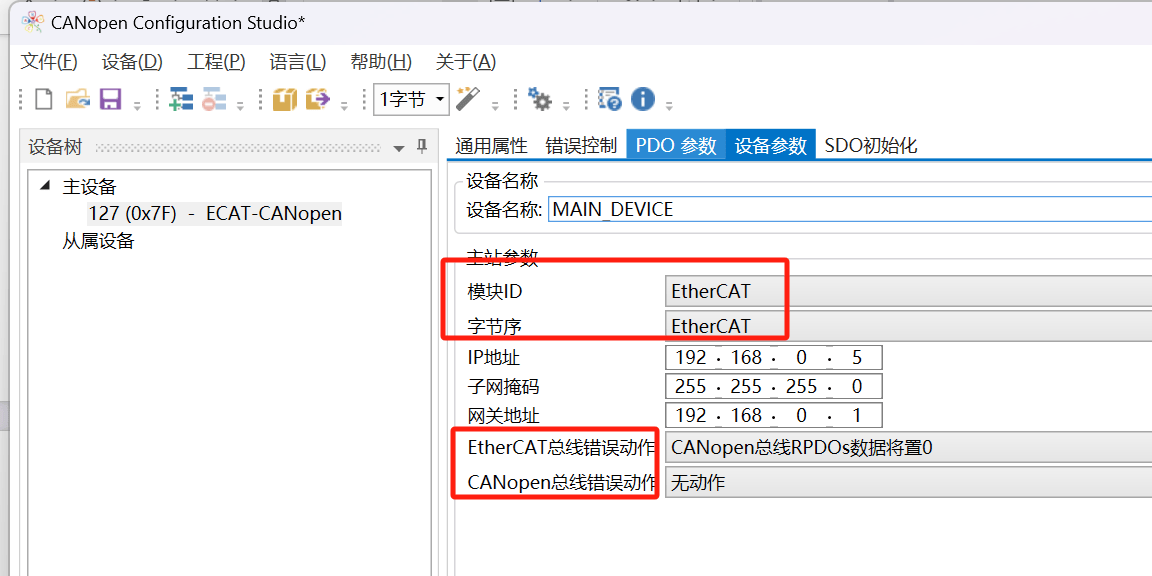
设置网关CANopen一侧的波特率以及通讯周期侧参数。
Canopen一侧主要设置波特率及通讯周期参数,从站驱动器默认波特率与主站保持一致。
设备参数一侧主要设置IP地址与字节传输的大小端顺序以及掉线后数据处理方式。
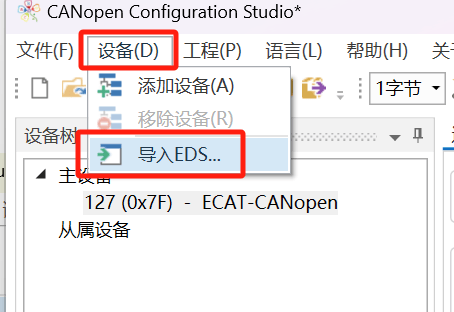
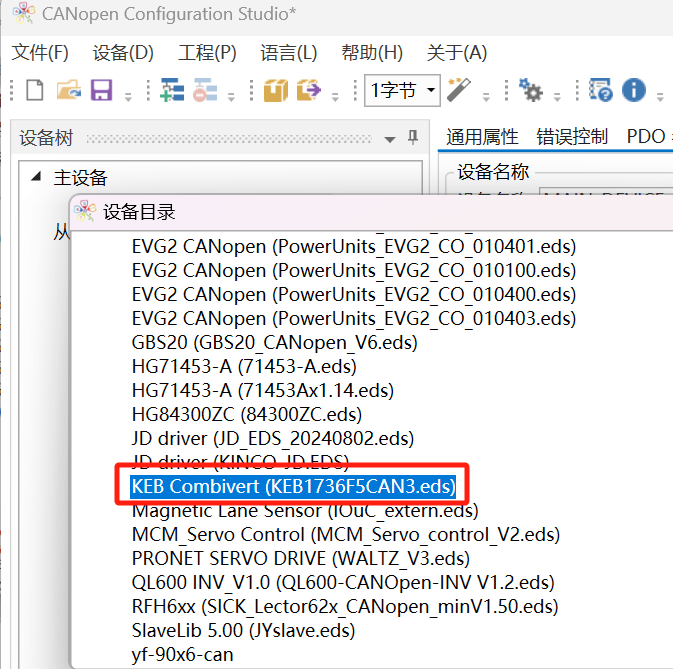
导入从站伺服EDS文件
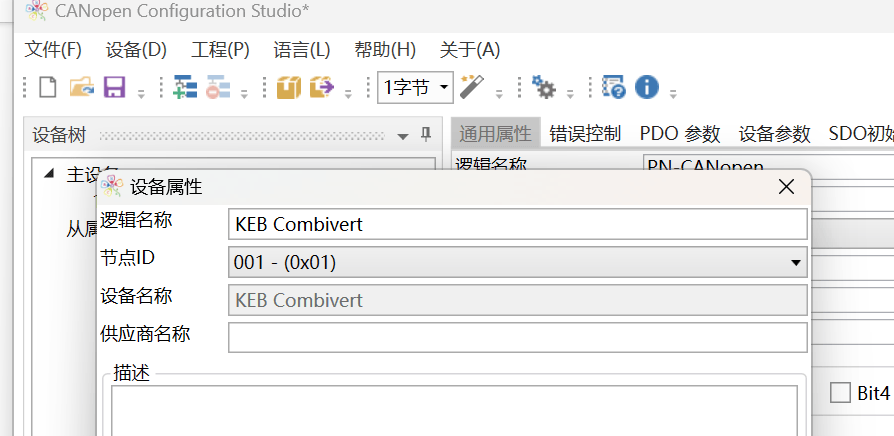
导入后将从站添加进网关组态
设置好从站地址(默认为1)
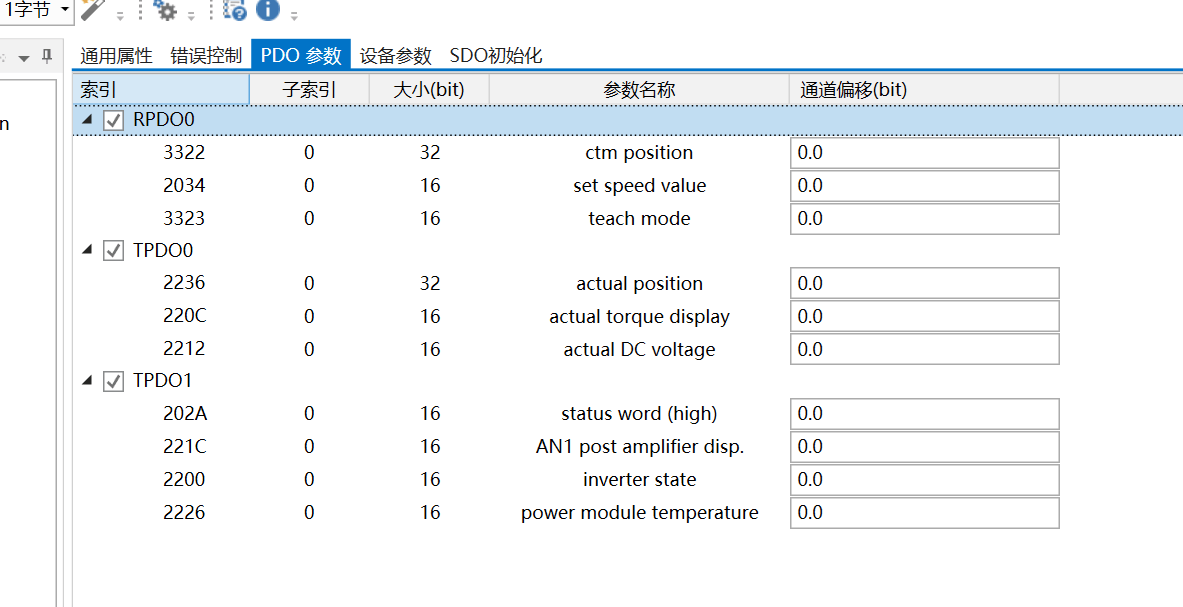
设置从站PDO所包含的索引参数,比如控制字,模式,位置,速度等。
在PDO上点击右键,选择添加
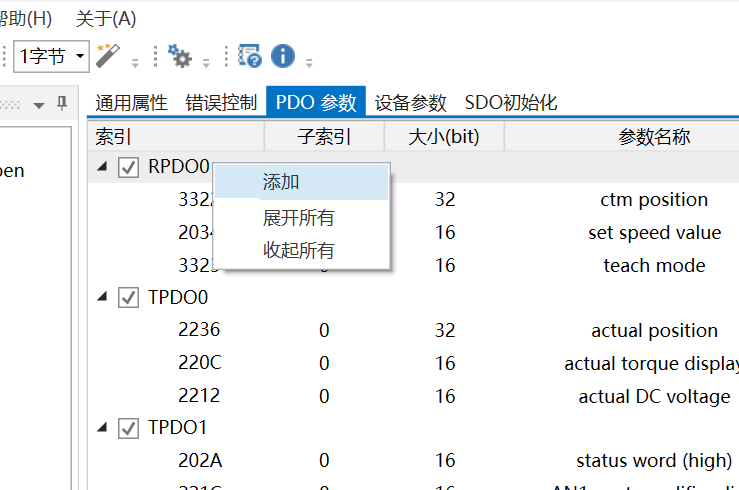
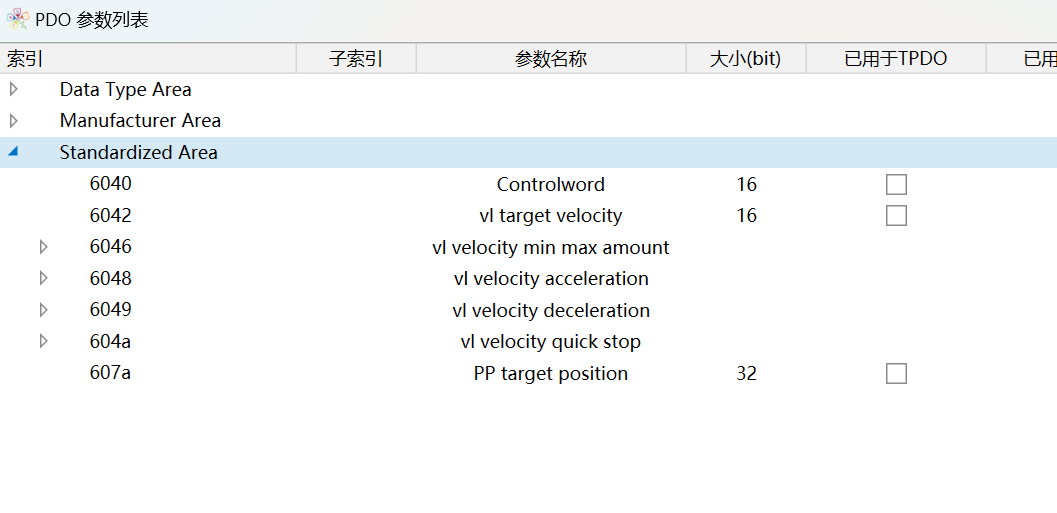
选择需要用到的参数。
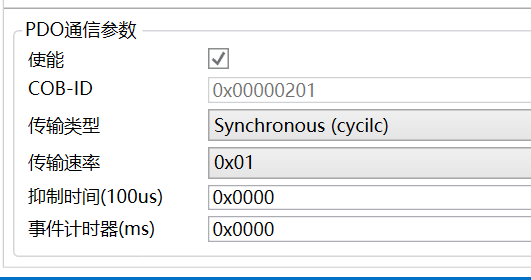
设置PDO的通讯参数,如传输类型,抑制时间,事件计时器等参数。
参数添加完成后分配参数的通道映射
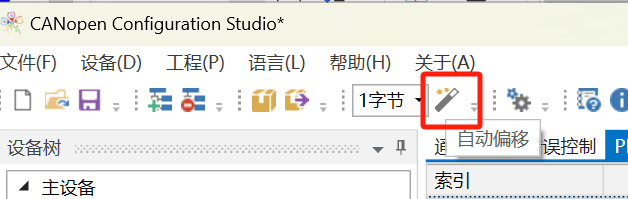
点击自动偏移,网关会自动分配排序对应PLC一侧的输入输出点。
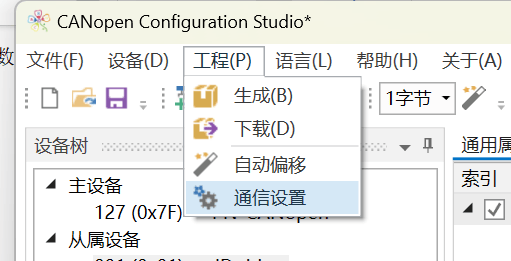
确认配置无误后将组态下载至网关。首先点击工程-通信设置。扫描网关默认IP(电脑与网关保持同一网段)连接后点击生成-下载即可将配置下载进网关。
到此网关完整配置结束。
配置完成后将全部设备上电,待指示灯正常后即可正常使用。
审核编辑 黄宇
-
开疆智能EtherCAT转CANopen网关连接磁导航传感器配置案例2025-07-14 712
-
开疆智能EtherCAT转CANopen网关连接UV灯配置案例2025-07-13 714
-
开疆智能CCLinkIE转CANopen网关连接COMBIVERT驱动控制器配置案例2025-07-05 716
-
开疆智能CCLinkIE转CANopen网关连接四宏电机驱动器配置案例2025-07-03 584
-
开疆智能CCLinkIE转Canopen网关连接台达伺服驱动器配置案例2025-06-30 714
-
开疆智能ModbusTCP转Devicenet网关连接机器人配置案例2025-06-28 2506
-
开疆智能ModbusTCP转Devicenet网关连接远程I/O配置案例2025-06-23 940
-
开疆智能Ethernet/IP转Profinet网关连接纳博特控制器配置案例2024-12-14 1560
-
工业通讯中CANOPEN转EtherCAT的转换2023-12-12 1576
-
应用案例丨伺服驱动器连接Ethercat转profinet网关2023-05-18 2223
-
profinet转canopen网关连接施耐德变频器配置案例2023-04-12 3429
-
求CANOpen转PROFINET网关连接东元伺服驱动器配置案例2021-11-15 1744
全部0条评论

快来发表一下你的评论吧 !
