

用于机器人的超声波传感器模块
描述
随着传感器技术的推广应用,机器人的发展也备受关注,同时也因为传感器技术的进步,使得工业机器人的发展有了支持。可见传感器为推动中国机器人产业快速有序发展立下了汗马功劳。在机器人中使用的超声波传感器是一个电子模块,测量距离在3cm到400cm之间。它可以用于帮助机器人避开障碍物,或用于其他相关项目的距离测量和避障工程。传感器可谓是用来检测机器人自身的工作状态,以及机器人智能探测外部工作环境和对象状态的核心部件。不仅能感受规定的被测量,还能按照一定的规律转换成可用输出信号的器件或装置。
由于超声波指向性强,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等,都可以通过超声波来实现。利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在移动机器人的研制上也得到了广泛的应用。
为了使移动机器人能自动避障行走,就必须装备测距系统,以使其及时获取距障碍物的距离信息(距离和方向)。在三方向(前、左、右)组成超声波测距系统,就是为机器人了解其前方、左侧和右侧的环境而提供一个运动距离信息。超声波传感器接上电源可以单独作为超声波测距使用, 超声波传感器还可以指定从单片机I/O端口上输出分段距离检测信号,可以直接装在机器人上,作为寻物、避障探测等应用。下面让我们以韩国Hagisonic 机器人超声波传感器模块 - HG-M40系列、HG-L40系列一起来了解用于机器人的超声波传感器模块具体方案。
一、机器人超声波传感器模块 - HG-M40系列, HG-L40系列产品特性
探测物体、测量距离
中距
多方向
“点击噪声”低
室内环境
死区最小化
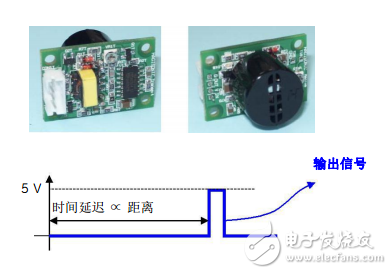
实时信号(5V TTL)
在 40kHz 下工作
3 种模块 − 收发器(HG-M40D) − 发送器(HG-M40T) − 接收器(HG-M40R)
二、超声波测距原理
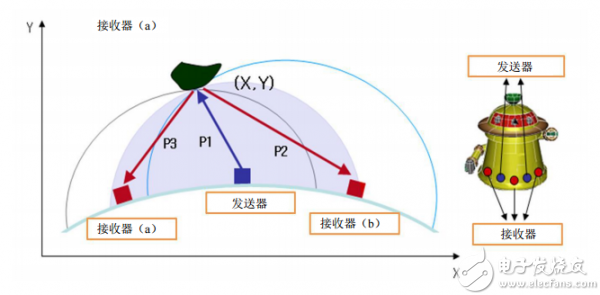
超声波发射器向某一方向发射超声波,在发射时刻的同时计数器开始计时,超声波在空气中传播,途中碰到障碍物面阻挡就立即反射回来,超声波两个接收器分别收到反射波就立即停止计时,并测量每条路径的距离和飞行时间的比例 (P1+P2, P1+P3)。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物面的距离s,即:s=340t/2。
三、机器人超声波传感器模块 - HG-M40系列, HG-L40系列模块与模式的区别
1、模块
① 收发器(D) : • 不仅可用作收发器模块,而且在不同的接线方式下,可以作为接收器或发送器使用。
因为收发器要发出超声波并等待回复,它可探测 30cm~40cm 及更远的距离。无论怎
样,它会尽可能识别出物体是否在某处。
② 发送器(T) : 仅发送超声波。
③ 接收器(R) : 仅接收超声波。
※ 使用 2 套或更多发送器和接收器时,可以进行 1~2cm 的近距离探测。
※ 同样,如果所用的是收发器,当它独立用作发射器或接收器时,也可以探测到距离短至 1〜2Cm 的障碍物。
2、模式
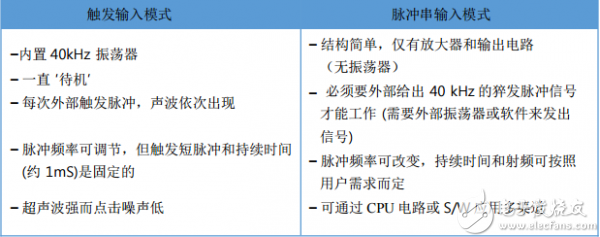
触发输入模式 (M-type)
脉冲串输入模式(L-type) 3. M-type 与 L-type 间的差别。
由于用超声波测量距离并不是一个点测量。超声波传感器具有一定的扩散特性,发射的超声能量主要集中在主波瓣上,沿着主波轴两侧呈波浪型衰减,(常规)左右约60°的扩散角(可选)。事实上,距离计算是基于超声波成功、垂直的反射名义下进行的。但对于移动机器人很难保证其自身运动姿态的稳定性,采用超声波传感器固定在移动机器人车身的探测方式,当移动机器人偏离平行墙面时,探测系统往往很难得到实际的距离。另外,超声波这种发散特性在应用于测量障碍物的时候,只能提供目标障碍物的距离信息,而不能提供目标的方向和边界信息。因此需要用多个超声传感器以及其他传感器共同工作。
- 相关推荐
- 超声波传感器
-
基于超声波传感器的测距系统设计2009-12-15 0
-
基于超声波传感器的自主移动机器人的探测系统2012-01-19 0
-
【卡酷机器人】试用三:超声波模块2015-02-21 0
-
超声波传感器在机器人中的应用2018-08-09 0
-
基于超声波传感器的自主移动机器人探测系统2018-11-02 0
-
超声波传感器在机器人避障中有什么作用2019-02-27 0
-
基于超声波传感器的航模应用2019-03-01 0
-
超声波避障技术助力智能扫地机器人的市场2020-05-11 0
-
超声波传感器的优势及原理2020-06-19 0
-
机器人应用的超声波传感器解决方案2020-08-18 0
-
移动机器人超声波测距功能设计2021-10-08 0
-
超声波传感器的优缺点分析2023-04-21 0
-
超声波传感器是如何工作的?2018-10-09 4890
-
机器人超声波传感器MB7360的参数性能及应用分析2020-04-21 3285
-
使用超声波传感器和Arduino构建一个避障机器人2022-09-08 3424
全部0条评论

快来发表一下你的评论吧 !
