

如何使用PSoC 6制作完整的测试系统来与BMI160进行通话
描述
我一直在研究一系列PSoC 6项目,以准备一些新视频并在Embedded World上使用。对于其中一个项目,我需要一个动作敏感的遥控器......并且我们很方便地将一台博世BMI160运动传感器放到了CY8CKIT-062-BLE开发套件随附的新CY8CKIT-028-EPD屏蔽罩上。
在本文中,我将向您展示如何使用PSoC 6制作完整的测试系统来与BMI160进行通话。步骤是:
-
克隆博世BMI160驱动程序库
-
创建一个新的PSoC 6项目并添加驱动程序库
-
为博世驱动程序创建HAL
-
创建主要固件并进行测试
克隆博世BMI160驱动程序库
当我开始这个时,我知道董事会有一个运动传感器,但我不知道是什么样的。我假设它是基于I2C的传感器,所以我连接了桥接控制面板并探测I2C总线。但是这就是它所说的:
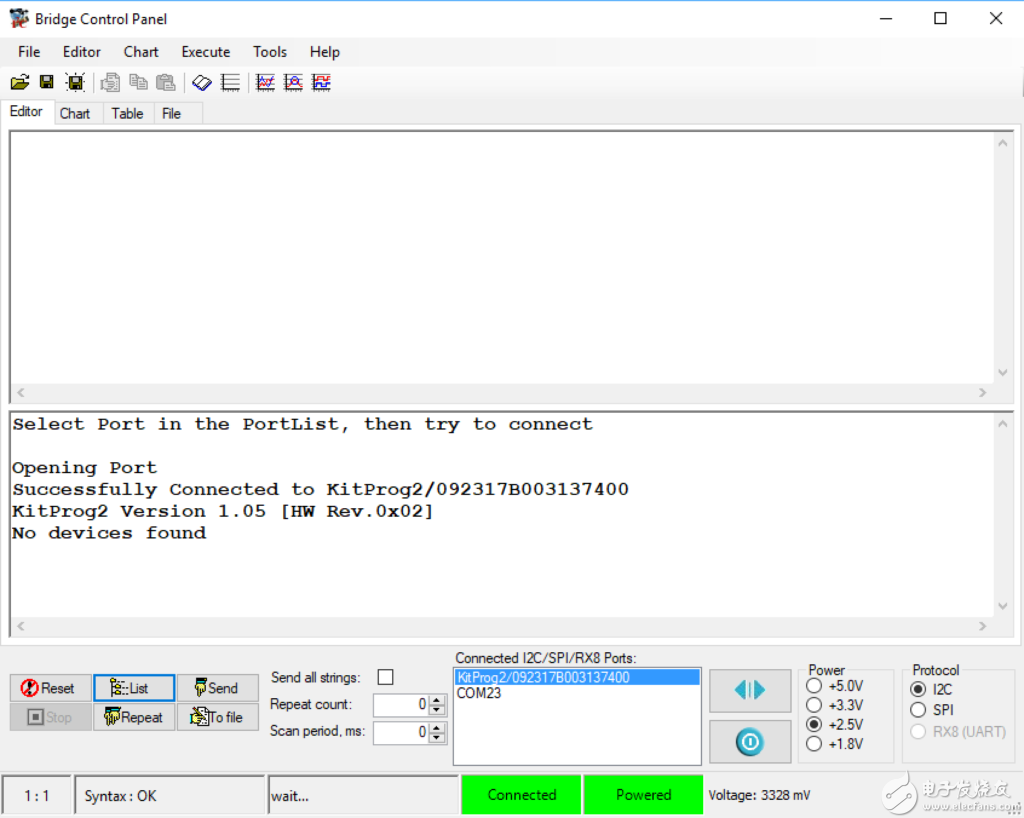
那么......到底什么?然后,我看了看董事会,试图弄清楚发生了什么......低下,看看......我的电路板是在添加运动传感器之前完成的原型。这里是:
这里是一块带有传感器的电路板。
当我插入该板并使用Bridge Control Panel进行测试时,我会得到:
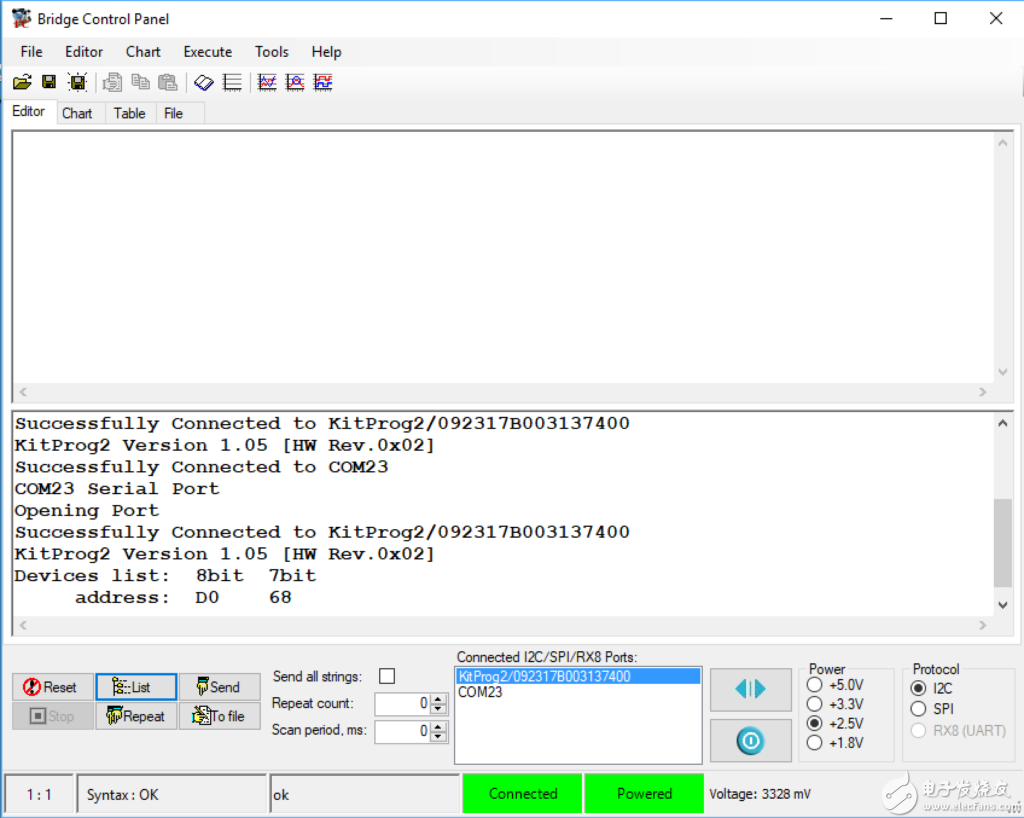
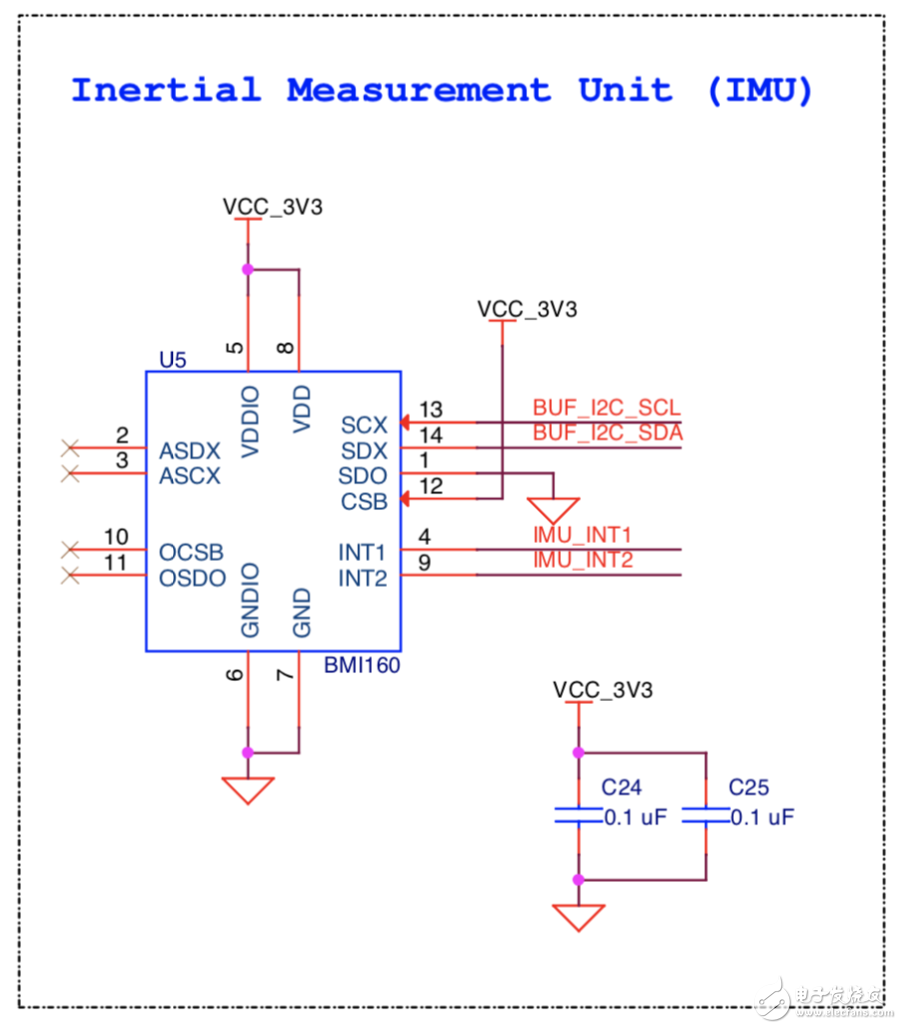
接下来我做的就是看原理图。OK,您可以看到惯性测量单元(IMU)是连接到I2C总线的BMI160。另一件很酷的事情是,devkit团队连接了两条中断线。这些线路通常用于IMU向PSoC 6发送信号(例如,用户可能开始移动)。
查看原理图后,下一步是查看BMI160 数据表并尝试弄清楚如何与设备进行连接。通常这些设备有一堆寄存器,其位数字段的数量令人难以置信。这一直是这个过程中不好玩的部分。但是这次当我去博世网站上的BMI160设备页面时,有一个按钮显示“文档和驱动程序”,当您点击它时,会有一个链接到BMI160驱动程序的GitHub 。得分了!
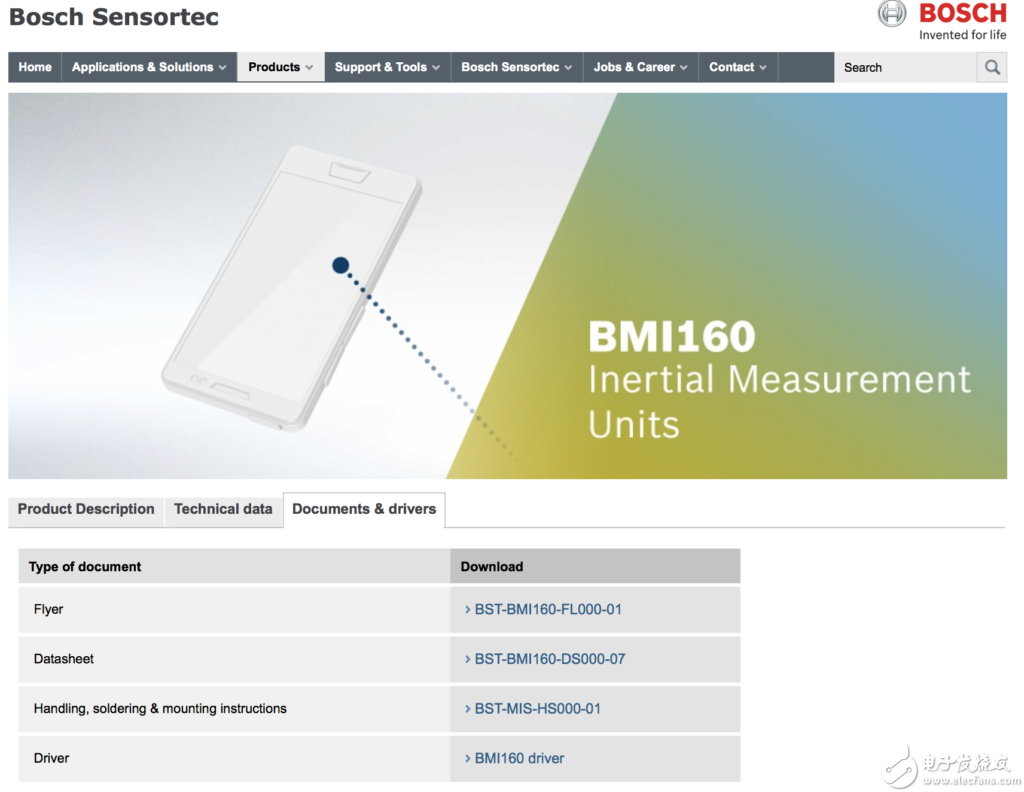
要做到这一点,你只需要“git clone git@github.com:BoschSensortec / BMI160_driver.git”
使用博世BMI160驱动程序库创建新的PSoC 6项目
所以,让我们继续测试它。首先创建一个新的PSoC 63项目
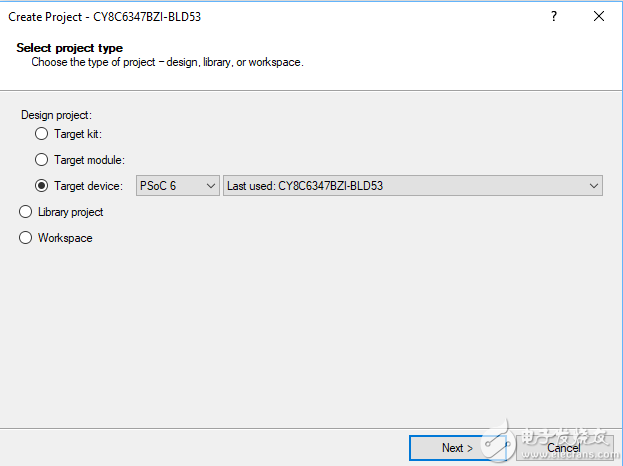
使用空白示意图
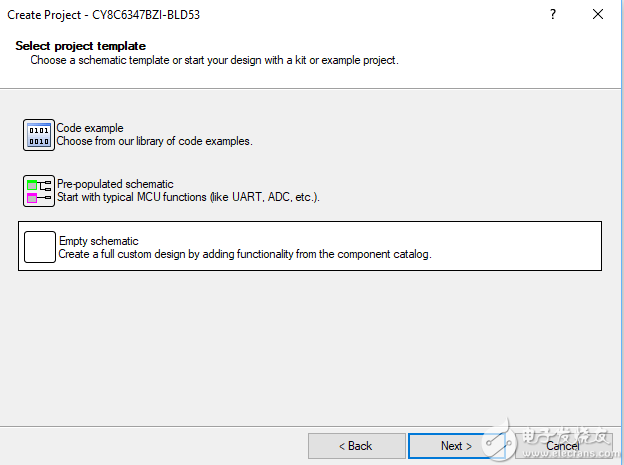
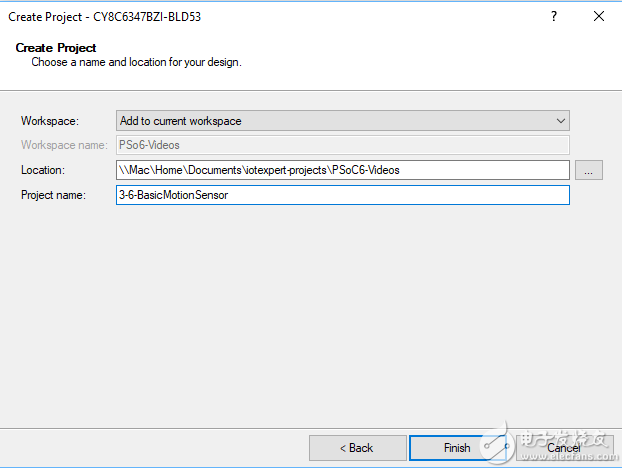
给它一个名字
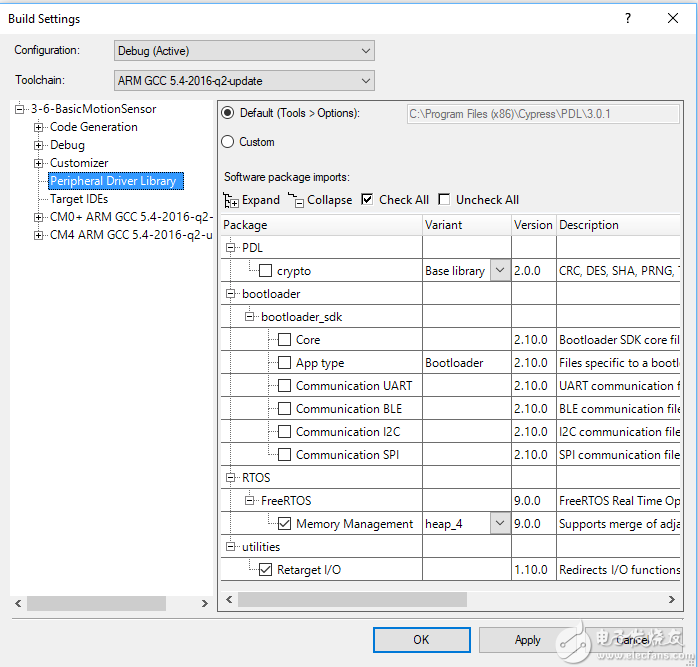
添加Retarget I / O和FreeRTOS(从构建设置菜单中)
添加一个UART和一个I2C主控
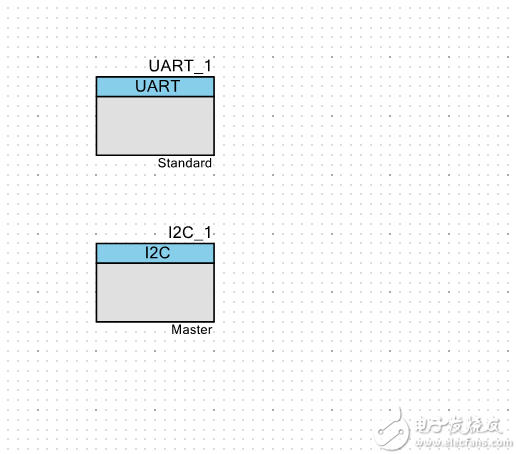
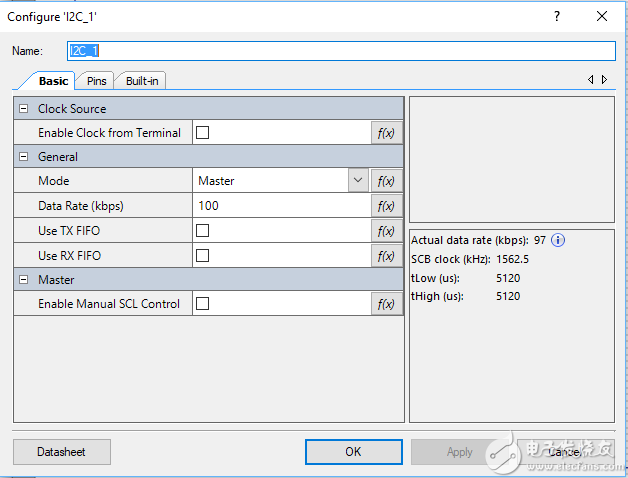
要使I2C成为主设备,您需要双击并将其更改为主设备
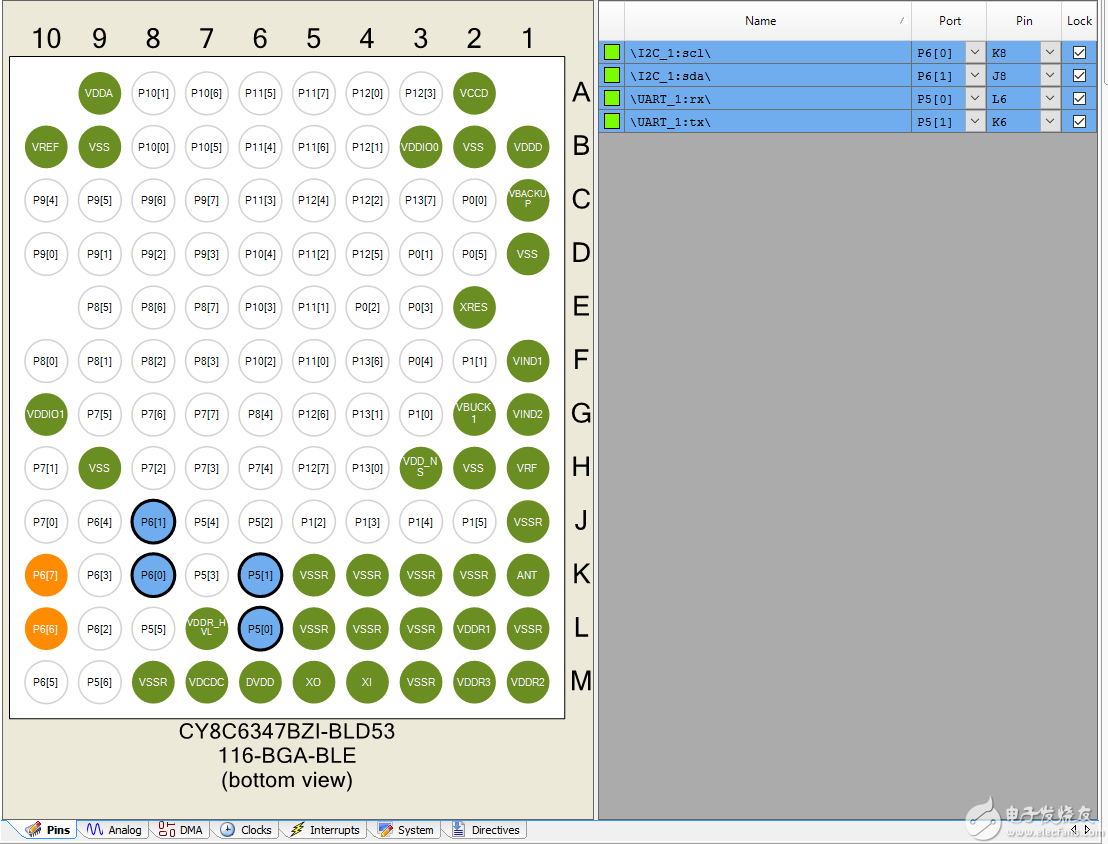
然后分配引脚
运行“构建 - >生成应用程序”来获得您需要的所有PDL固件。
编辑stdio_user.h以使用UART(扫描stdio_user.h找到正确的位置)
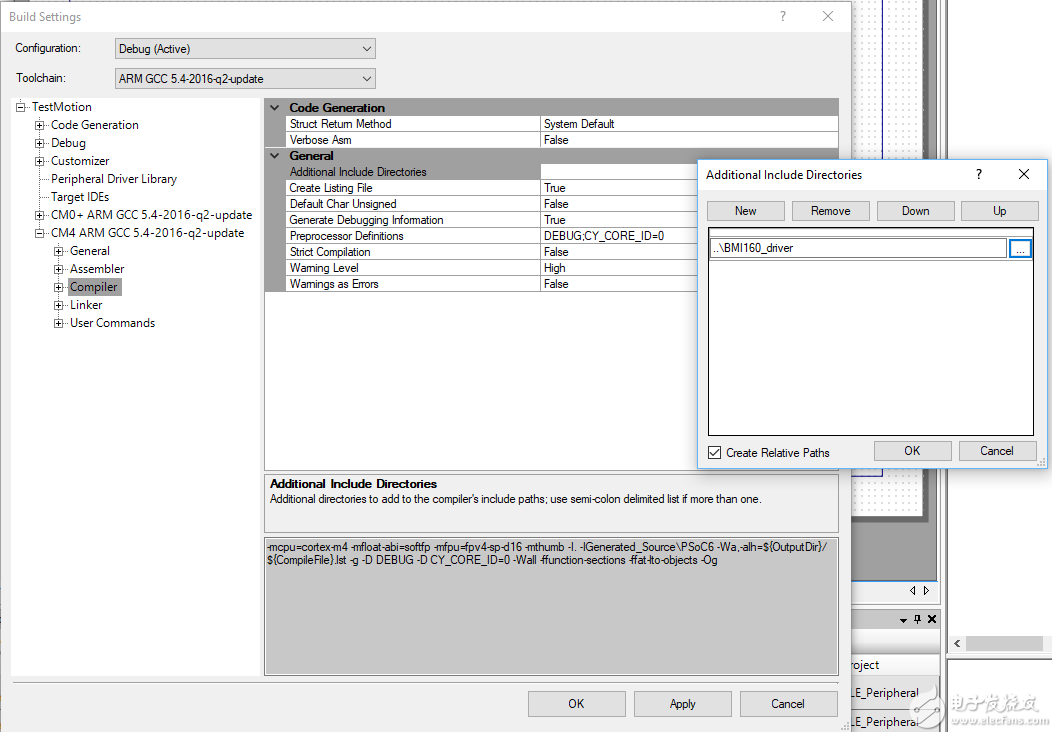
#include "project.h" /* Must remain uncommented to use this utility */ #define IO_STDOUT_ENABLE #define IO_STDIN_ENABLE #define IO_STDOUT_UART UART_1_HW #define IO_STDIN_UART UART_1_HW 将“BMI_driver”目录添加到CM4项目的包含路径。(要进入此菜单,请右键单击该项目并选择“构建设置”)
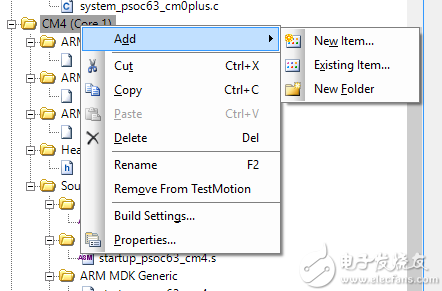
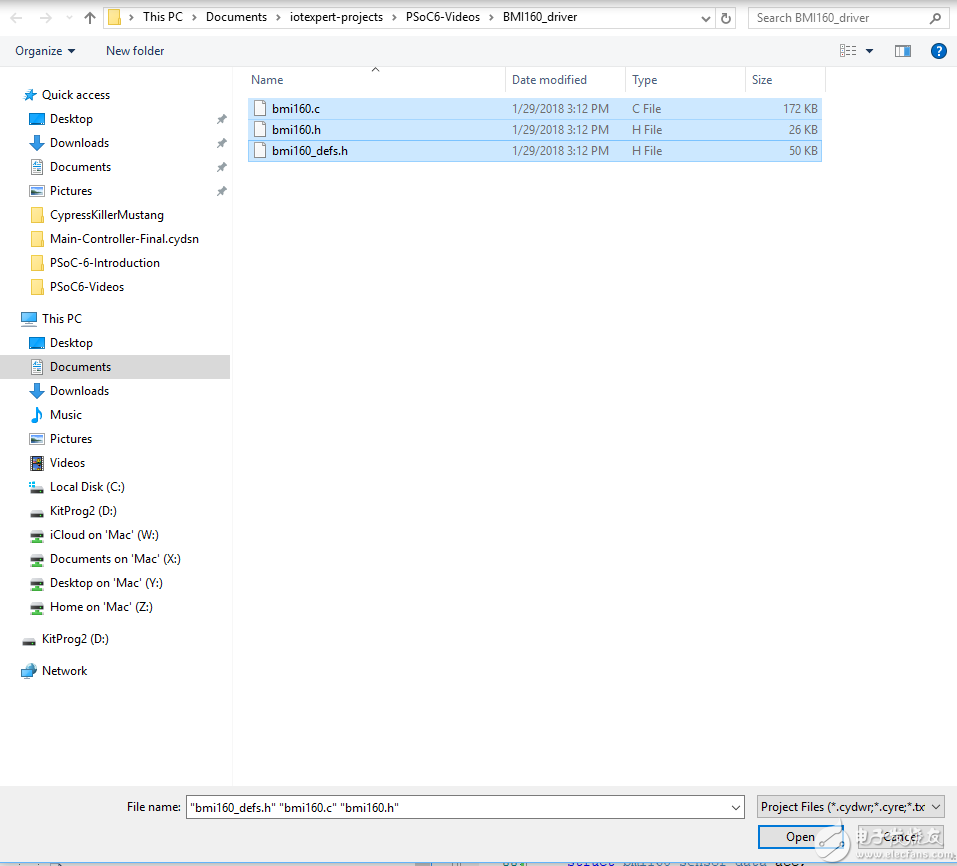
将Bosch Driver文件添加到项目中
为博世驱动程序创建HAL
使用博世驱动器很简单。你所需要做的就是更新HAL。
-
提供写入I2C寄存器的功能
-
提供读取I2C寄存器的功能
-
提供延迟指定毫秒数的功能
-
创建一个结构来保存初始化信息和函数指针
该器件实现了赛普拉斯所称的“EZI2C”协议,该协议也称为I2C EEPROM协议。该器件被组织为一系列寄存器。每个寄存器都有一个从0-> 0xFF(单字节地址)的地址。要写入注册表,您需要
-
发送I2C启动
-
发送7位I2C地址
-
发送一个写入位(aka a 0)
-
发送要写入的寄存器地址(不要将I2C地址与内部BMI160地址混淆)
-
发送您想要写入的8位值
-
发送一个停止
EZI2C的一个很酷的事情是,它可以跟踪地址,并在每次写入时自动递增寄存器地址。这意味着您可以编写一个地址序列,而无需为每个地址执行完整的事务。
鉴于引入写函数很简单:
static int8_t BMI160BurstWrite(uint8_t dev_addr, uint8_t reg_addr,uint8_t *data, uint16_t len)
{
Cy_SCB_I2C_MasterSendStart(I2C_1_HW,dev_addr,CY_SCB_I2C_WRITE_XFER,0,&I2C_1_context);
Cy_SCB_I2C_MasterWriteByte(I2C_1_HW,reg_addr,0,&I2C_1_context);
for(int i = 0;i为了阅读你做一个类似的交易来写。具体的步骤是:
发送I2C启动
发送7位I2c地址
发送一个WRITE位aka 0
发送您想要读取的寄存器地址
发送I2C重新启动
读一个字节
发送NAK
发送一个停止
读取事务与写入类似,您可以通过发送ACK继续读取连续字节。您读取的最后一个字节应该是NAK,以告诉远程设备您正在读取。鉴于代码也很简单。
// This function supports the BMP180 library and read I2C Registers
static int8_t BMI160BurstRead(uint8_t dev_addr, uint8_t reg_addr,uint8_t *data, uint16_t len)
{
Cy_SCB_I2C_MasterSendStart(I2C_1_HW,dev_addr,CY_SCB_I2C_WRITE_XFER,0,&I2C_1_context);
Cy_SCB_I2C_MasterWriteByte(I2C_1_HW,reg_addr,0,&I2C_1_context);
Cy_SCB_I2C_MasterSendReStart(I2C_1_HW,dev_addr,CY_SCB_I2C_READ_XFER,0,&I2C_1_context);
for(int i = 0;i我的读写功能都有一个错误。那个错误是?没有错误检查。我看到了一些间歇性的奇怪现象,其中I2C总线被锁定,最终需要重置才能修复。这可以通过检查I2C功能上的错误代码来防止。
既然我们有读写功能,我们可以设置我们的设备:要做到这一点:
设置一个类型为bmi160_dev的结构
初始化函数指针
初始化设备的设置
最后发送设置
static struct bmi160_dev bmi160Dev;
static void sensorsDeviceInit(void)
{
int8_t rslt;
vTaskDelay(500); // guess
/* BMI160 */
bmi160Dev.read = (bmi160_com_fptr_t)BMI160BurstRead;
bmi160Dev.write = (bmi160_com_fptr_t)BMI160BurstWrite;
bmi160Dev.delay_ms = (bmi160_delay_fptr_t)vTaskDelay;
bmi160Dev.id = BMI160_I2C_ADDR; // I2C device address
rslt = bmi160_init(&bmi160Dev); // initialize the device
if (rslt == 0)
{
printf("BMI160 I2C connection [OK].
");
bmi160Dev.gyro_cfg.odr = BMI160_GYRO_ODR_800HZ;
bmi160Dev.gyro_cfg.range = BMI160_GYRO_RANGE_125_DPS;
bmi160Dev.gyro_cfg.bw = BMI160_GYRO_BW_OSR4_MODE;
/* Select the power mode of Gyroscope sensor */
bmi160Dev.gyro_cfg.power = BMI160_GYRO_NORMAL_MODE;
bmi160Dev.accel_cfg.odr = BMI160_ACCEL_ODR_1600HZ;
bmi160Dev.accel_cfg.range = BMI160_ACCEL_RANGE_4G;
bmi160Dev.accel_cfg.bw = BMI160_ACCEL_BW_OSR4_AVG1;
bmi160Dev.accel_cfg.power = BMI160_ACCEL_NORMAL_MODE;
/* Set the sensor configuration */
bmi160_set_sens_conf(&bmi160Dev);
bmi160Dev.delay_ms(50);
}
else
{
printf("BMI160 I2C connection [FAIL].
");
}
}
创建主要固件并进行测试
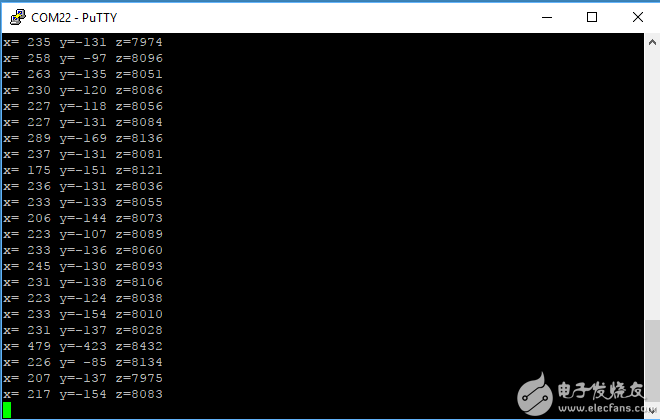
最后,我通过运行打印出加速数据的无限循环来测试固件。
void motionTask(void *arg)
{
(void)arg;
I2C_1_Start();
sensorsDeviceInit();
struct bmi160_sensor_data acc;
while(1)
{
bmi160_get_sensor_data(BMI160_ACCEL_ONLY, &acc, NULL, &bmi160Dev);
printf("x=%4d y=%4d z=%4d
",acc.x,acc.y,acc.z,);
vTaskDelay(200);
}
}
现在你应该有这样的:
最后整个节目一举成名
#include "project.h"
#include "FreeRTOS.h"
#include "task.h"
#include
#include "bmi160.h"
static struct bmi160_dev bmi160Dev;
static int8_t BMI160BurstWrite(uint8_t dev_addr, uint8_t reg_addr,uint8_t *data, uint16_t len)
{
Cy_SCB_I2C_MasterSendStart(I2C_1_HW,dev_addr,CY_SCB_I2C_WRITE_XFER,0,&I2C_1_context);
Cy_SCB_I2C_MasterWriteByte(I2C_1_HW,reg_addr,0,&I2C_1_context);
for(int i = 0;i
-
 z1021256354
2019-05-22
0 回复 举报有完整的驱动么?谢谢分享 收起回复
z1021256354
2019-05-22
0 回复 举报有完整的驱动么?谢谢分享 收起回复
-
是否可以在Intel Aero上校准BMI1602018-11-09 3076
-
ST是否为博世BMI160的IMU传感器提供传感器融合库?2019-04-26 3704
-
BMI160传感器的实际应用2021-04-23 1181
-
如何对TWS通话降噪耳机进行测试2021-08-03 3948
-
如何实现stm32L301与BMI160通信2021-12-03 1465
-
为什么用BMI160软件包读出来的加速度传感器值是异常的呢2022-08-09 1295
-
BMI160完整资料2016-03-03 5854
-
BMI160博士6轴陀螺仪2016-05-12 2711
-
BMI160数据手册+驱动程序2016-11-22 6191
-
BMI160小功率惯性测量装置的详细数据手册免费下载2019-03-11 2999
-
关于Bosch Sensortec BMI160的性能分析和在小米魔方控制器上的应用2019-10-29 9713
-
dfrobot BMI160 6轴惯性运动传感器简介2019-12-31 6312
-
STM32L031 BMI160 陀螺仪检测到移动向单片机发送中断2021-11-23 999
-
BMI160参数概述 BOSCH/博世六轴加速度 陀螺仪 传感器2022-11-21 17069
全部0条评论

快来发表一下你的评论吧 !
