

 全球首创!PCIe超实时6通道EtherCAT运动控制卡上市!
全球首创!PCIe超实时6通道EtherCAT运动控制卡上市!
电子说
描述
应用背景
当科技加速撞上需求裂变,制造业迎来更高要求。市场对设备更高产能、更精质量的渴求愈烈,而工艺复杂化与轴数暴增,高速高精的运动控制需求越来越迫切。 为应对这些技术难题,我们精准把握行业趋势,推出PCIE超实时6通道EtherCAT运动控制卡——XPCIE6032H。它正是为满足设备对更高加工速度与加工精度的控制需求,以顺应高性能总线化浪潮而生。
XPCIE6032H视频介绍可点击→“全球首创!PCIe 6路高性能EtherCAT运动控制卡XPCIE6032H_哔哩哔哩_bilibili”查看。
六通道独立运行|2-3us极速交互|EtherCAT总线冗余
● 六通道独立运行
XPCIE6032H集成6路独立EtherCAT主站接口。整卡最高可支持254轴运动控制;125usEtherCAT通讯周期时,两个端口配置冗余最高可支持32轴运动控制。6个EtherCAT主站各通道独立工作,多EtherCAT主站互不影响。
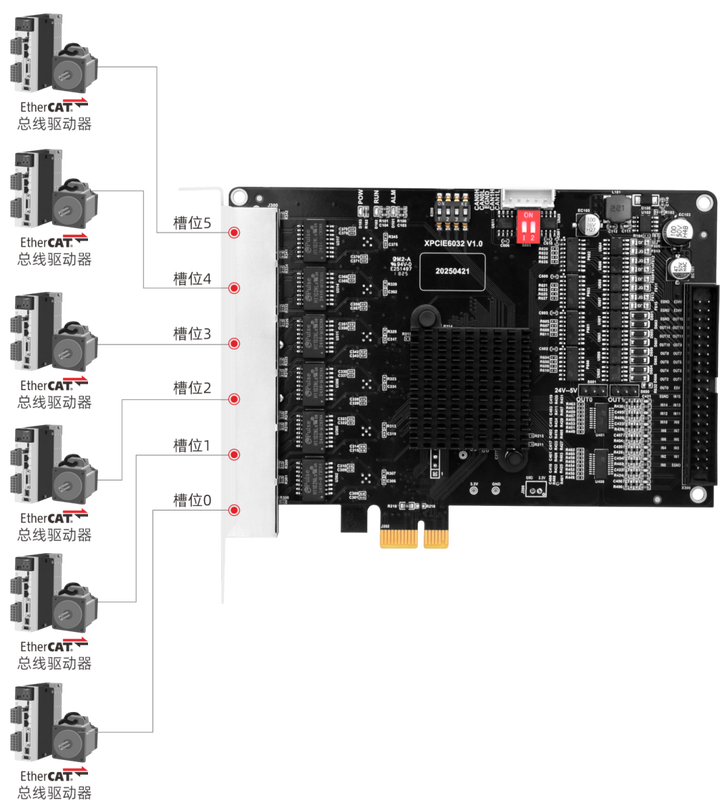
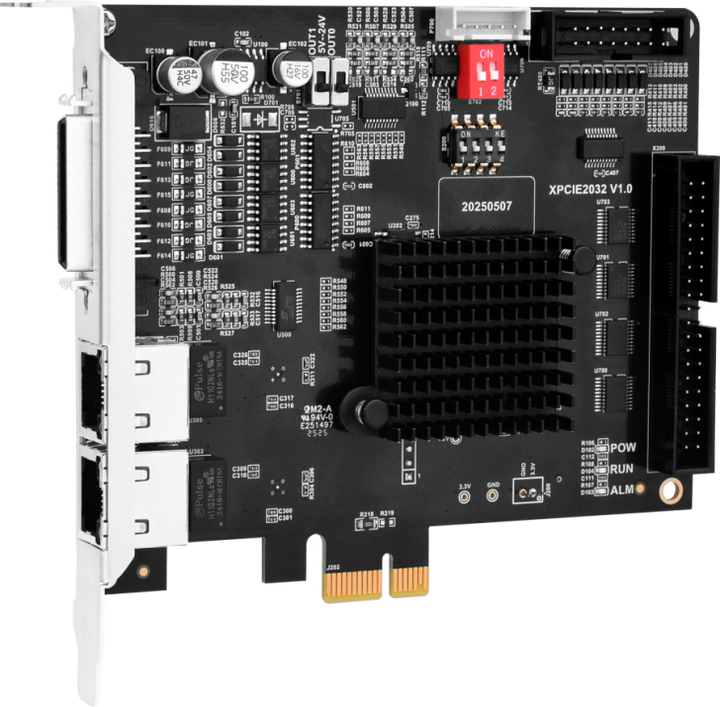
此外,对于EtherCAT接口数量需求不高的客户,我们增加衍生型号XPCIE2032H。同系列产品XPCIE2032H集成2路独立EtherCAT接口。整卡最高可支持至254轴运动控制;125usEtherCAT通讯周期时,单接口最高可支持32轴运动控制。2个EtherCAT主站各通道独立工作,多EtherCAT主站互不影响。
● 2-3us极速交互
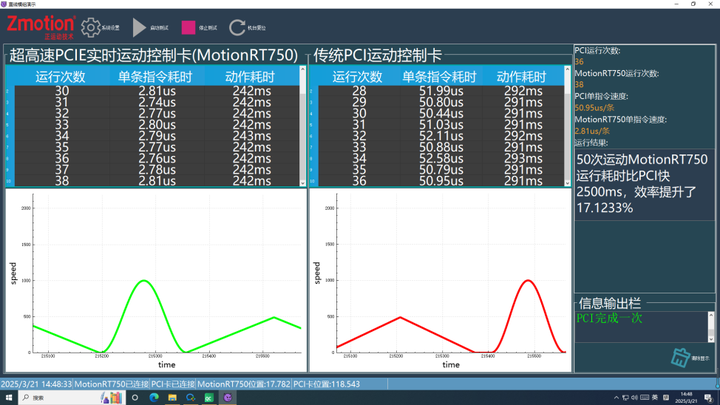
配合运动控制实时内核MotionRT750使用可实现更稳定、更高效的智能装备控制。MotionRT750运动控制实时内核使用共享内存的核间交互方式,大大幅度提升了交互效率,单条指令的交互时间也快至us级。相较于传统的PCI/PCIe、网口等通讯方式,速度提升了10-100倍以上。
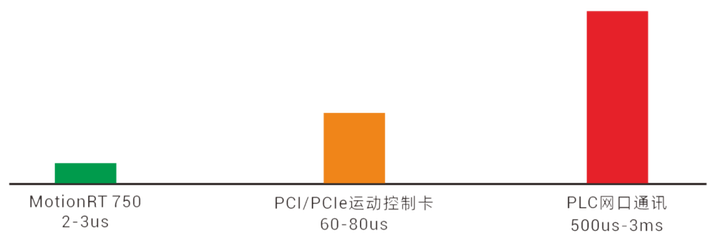
同一套测试环境下,通过50次直线电机的往复运动和1000次的IO循环翻转。统计整个控制周期的执行时间,采用MotionRT750实时内核的方案比传统PCI通信方案缩短了约2500ms,整体控制效率提升超过17.1%。
● EtherCAT总线冗余
搭载环形冗余架构,确保非故障从站持续保持正常EtherCAT通信,可显著提升系统可靠性与运行稳定性。针对连续生产场景对设备7*24不间断运行的要求,实现EtherCAT通讯的更可靠和更稳定,可有效杜绝非计划停产导致的产能损失。
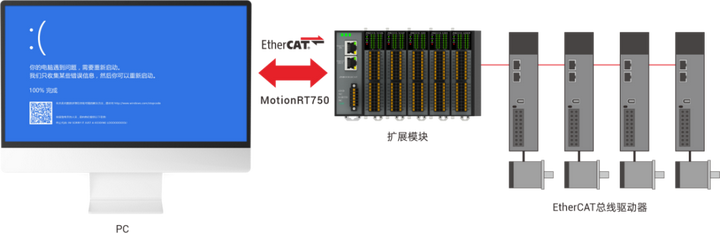
当Windows因病毒入侵、硬件异常插拔或驱动冲突导致系统崩溃时,仍可持续运行,且急停功能仍然保持有效,提供充分响应时间进行事故处置,显著提升工业控制安全性与可靠性。
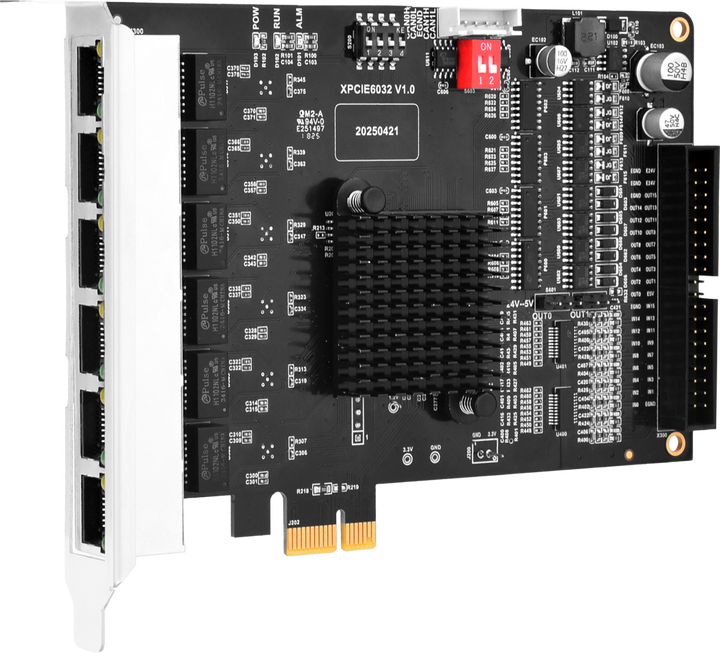
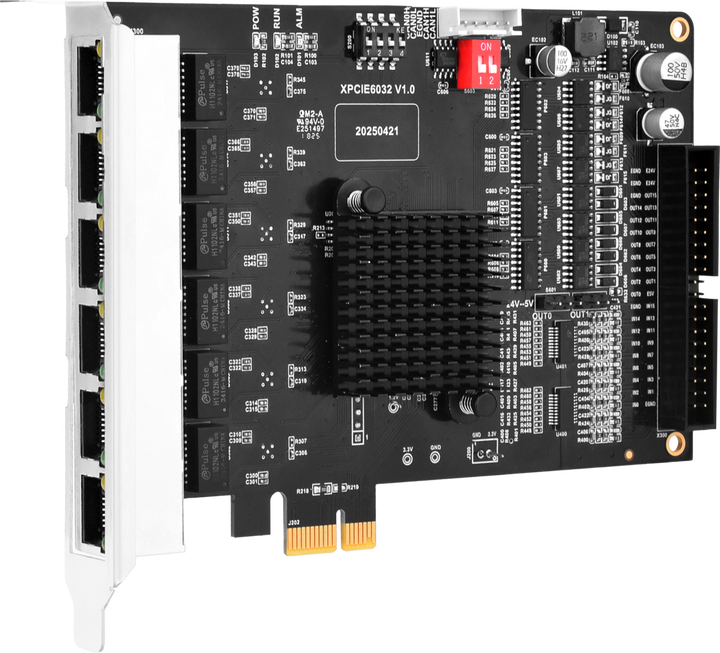
一、PCIe超实时6通道EtherCAT控制卡:XPCIE6032H
1.EtherCAT通讯周期可到125us(需要主机性能与实时性足够);
2.板卡集成6路独立的EtherCAT主站接口,最多可支持254轴运动控制;
3.搭载运动控制实时内核MotionRT750;
4.相较于传统的PCI/PCIe、网口等通讯方式,速度可提升了10-100倍以上;
5.板载16路高速输入,16路高速输出;
6.板载4路高速锁存、4路硬件位置比较输出、4路通用PWM输出。
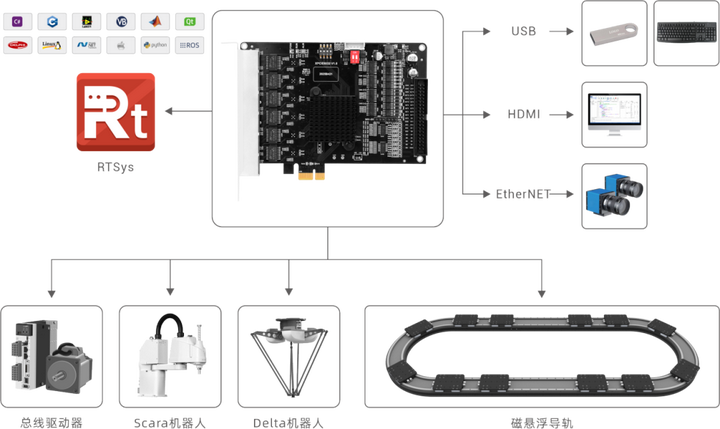
01 支持使用现成的API二次开发各种装备
支持多种编程语言,方便用户进行二次开发,快速实现定制化功能。

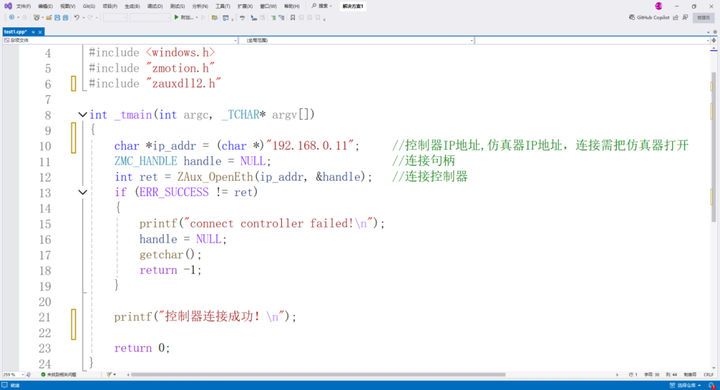
C++开发
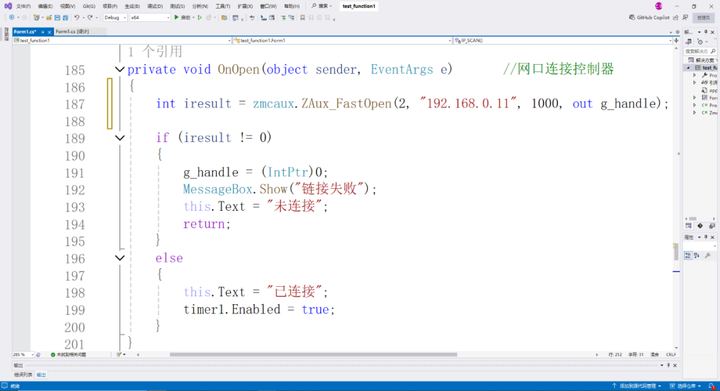
C#开发
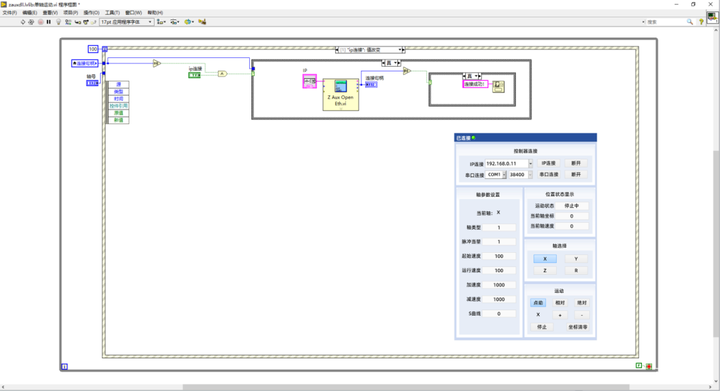
LabVIEW开发
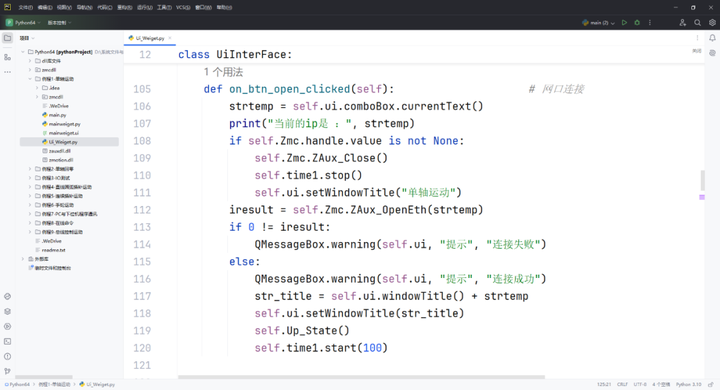
Python开发
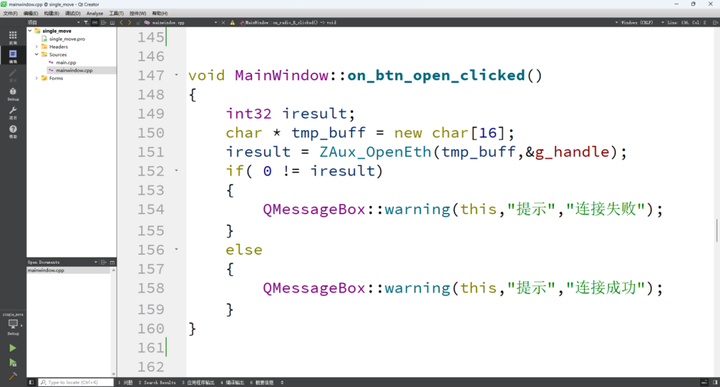
Qt开发
02 支持纯国产IDE开发环境RTSys进行项目开发
通过纯国产IDE开发环境RTSys进行项目开发,可实时仿真、在线跟踪以及诊断与调试,简便易用,支持多种高级上位机语言联合编程进行二次开发。
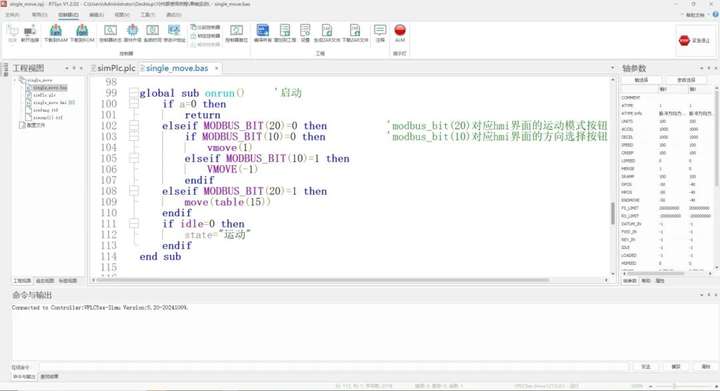
RTBasic界面
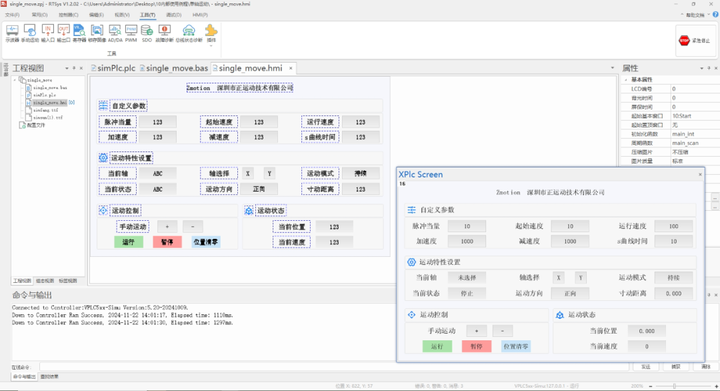
RTHmi界面
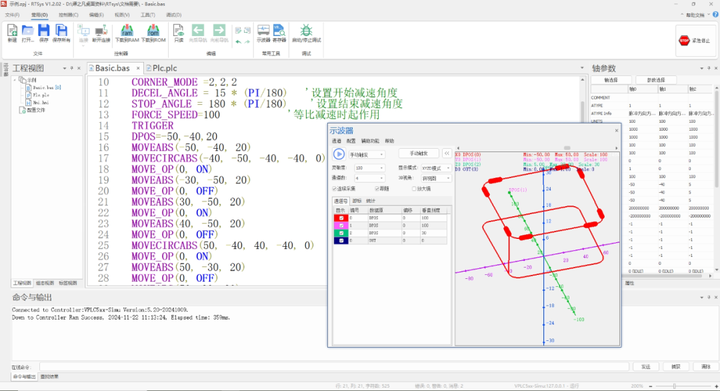
示波器界面
二、XPCIE6032H市场应用
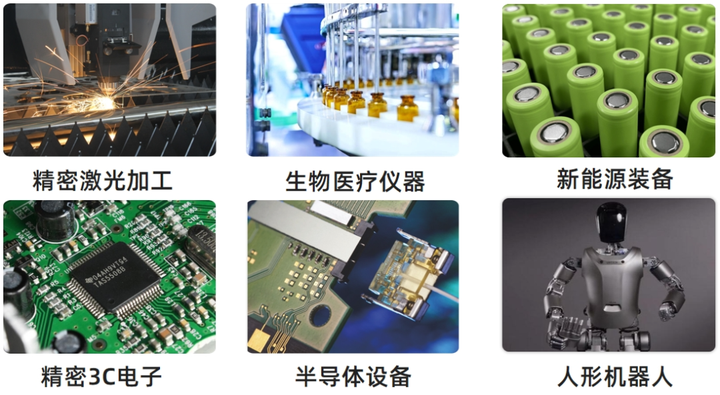
XPCIE6032H面向半导体设备、精密3C电子、生物医疗仪器、新能源装备、人形机器人及激光加工等高速高精场景,为固晶机、贴片机、分选机、锂电切叠一体机、高速异形插件设备等自动化装备提供核心运动控制支持。
三、应用案例
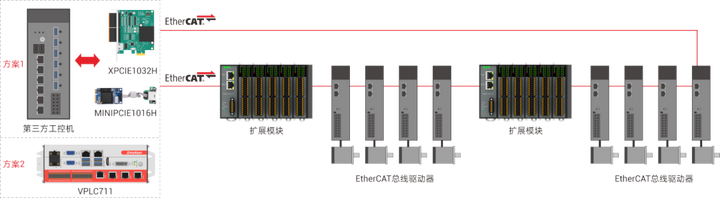
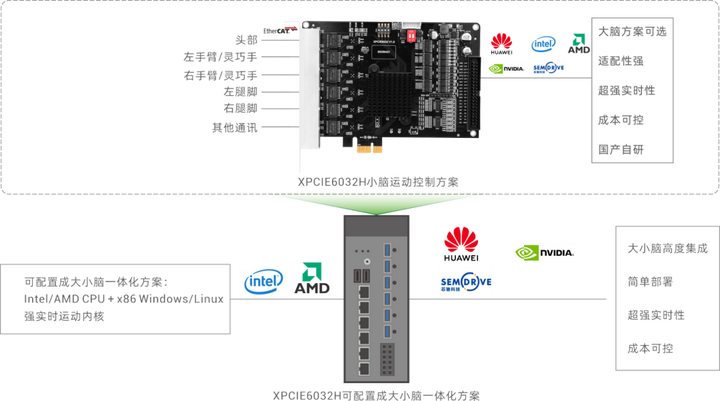
01 人形机器人方案
基于正运动超实时运动控制卡XPCIE6032H开发,协助客户部署人形机器人小脑控制,同时Intel/AMD CPU+x86 Windows/Linux强实时运动内核可配置成大小脑一体化方案。
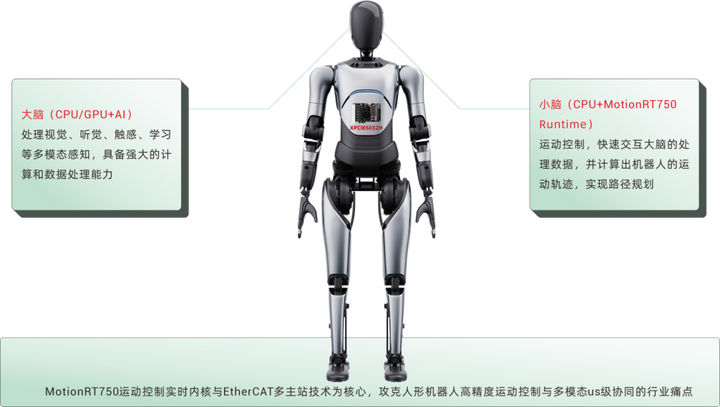
● 100%国产自研可控
软硬件国产自主自研,核心技术自主可控,有效规避技术封锁风险。
● 高效多轴协同控制
支持多通道独立EtherCAT主站,最低125usEtherCAT通讯周期,最大支持254轴自由分配,保障全身关节高速、精准协同。
● 超强实时响应
搭载MotionRT750强实时内核,实现视觉、感知与运动控制的内存级交互,机器人响应达微秒级。
● 开发便捷高效
提供统一API接口,无缝对接用户习惯;支持C语言扩展,显著提升执行效率(可达数十倍加速)。
● 灵活定制服务
可根据用户具体需求,提供软硬件一体化的定制运动控制方案。
02 多动子输送线运动控制方案
基于正运动超实时运动控制卡XPCIE6032H开发,协助客户部署“磁驱柔性生产线”和“磁悬浮输送线”。
● 高密度灵活移载
单导轨支持多达254个动子独立高速、高精度、低噪音运行与灵活组合。
● 智能集成与易用
集成动子防撞、多工位协同、视觉识别功能,支持低代码开发,简化应用。
● 精密同步控制
基于EtherCAT总线实现多轴高可靠同步,确保高精度运行,显著提升效率,满足严苛工业要求。
● 算法与交互优势
融合动子防撞与机器人控制算法,实现动子与机器人数据高效内部交互。
● 高度柔性配置
动子独立操控,胜任复杂输送、排序与加工;支持工艺灵活配置,满足多品种、小批量生产需求。
审核编辑 黄宇
-
高速高精运动控制!PCIe超实时2通道EtherCAT运动控制卡上市!#正运动技术 #EtherCAT正运动技术 2025-08-01
-
全球首创!PCIe 6路高性能EtherCAT运动控制卡XPCIE6032H #正运动技术 #运动控制卡正运动技术 2025-07-17
-
PCIe实时运动控制卡的双盘视觉筛选机上位机开发应用2024-10-10 1847
-
PCIe EtherCAT实时运动控制卡PCIE464的IO与编码器读写应用2024-07-17 2503
-
超高实时性的EtherCAT运动控制卡——PCIE4642024-01-26 2545
-
【正运动】高速高精,超高实时性的PCIe EtherCAT实时运动控制卡 | PCIE4642024-01-24 11289
-
PCIE464 — 高速高精,超高实时性的PCIe EtherCAT实时运动控制卡2024-01-17 2242
-
PCIE超高速实时运动控制卡在六面外观视觉检测上的应用2023-08-22 2132
-
不止10倍提速!PCIe EtherCAT实时运动控制卡XPCIE1032H 等您评测!2023-06-26 8884
-
EtherCAT运动控制卡的硬件接线与C#的硬件外设读写与回零运动2021-11-08 3941
-
EtherCAT运动控制卡的硬件接线与C#的单轴运动控制2021-10-22 4204
-
EtherCAT运动控制卡之ECI2820如何使用2021-09-01 1947
-
运动控制卡2013-06-05 4541
全部0条评论

快来发表一下你的评论吧 !
