

μCOS代码移植到了RT-Thread工程笔记
电子说
描述
公司项目原先使用μCOS-II,但是μCOS存在商业使用付费问题,故而我们转向用国产开源免费RTOS RT-Thread替代,花了一天半的时间将原来的μCOS代码移植到了RT-Thread上面。下面分移植方法和API对应表两部分讲下方法。
一、移植方法
软件环境:Win7+MDK5.18.0
硬件环境:STM32F103
1.从GitHub下载RT-Thread源码:https://github.com/RT-Thread/rt-thread;
2.将1步骤下载的源码打开,目录如下:
其中bsp目录下面,可以看到很多开发板工程目录,如下图:
项目主控是stm32f1系列的,选择stm32f10x这个目录下的工程作为基础版本。
3.基础工程框架下,将我们原有的工程文件添加进来,除去μCOS-II相关源码。
原来基于μCOS-II的相关源码目录如下:
os_cfg.h:μCOS-II系统相关的一些宏开关定义(如是否使能事件、mailbox、信号量及队列等)、系统参数定义(如每秒tick数、任务栈大小定义等),对应RT-Thread里面的rtconfig.h。
这个目录下面是与处理器相关的代码,os_cpu_a.asm文件通过Thumb2指令实现的一些中断服务函数等,例如voidOS_CPU_PendSVHandler(void)处理上下文切换异常等;对应到RT-Thread里面的context_rvds.S这个文件。os_cpu_c.c文件实现任务栈初始化和一些钩子函数(如空闲任务和systick等),对应到RT-Thread里面的cpuport.c。
需要说明的是启动文件context_rvds.S里面定义了两个中断服务函数跟stm32f10x_it.c里面是重复的,分别是HardFault_Handler和PendSV_Handler,移植的时候需要屏蔽掉stm32f10x_it.c里面相应的部分。
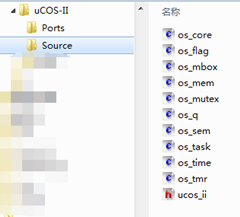
这个目录下是与处理器无关的文件,对应RT-Thread根目录下src里面的内容。
在移植的时候,先将以上与μCOS-II相关的源码全部删除,把我们工程其他源码放在\bsp\stm32f10x\src这个路径下,keil工程建立在\bsp\stm32f10x这里。
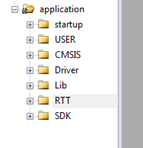
Keil工程目录如下:
-
Startup目录下是stm32和RT-Thread的启动文件,主要是中断向量表及中断服务函数定义,堆栈和PC指针的相关初始化。 -
USER目录下是我们的产品业务实现相关文件,包括main.c文件。 -
RTT目录下是RT-Thread源码,就是RT-Thread根目录下src里面的内容。
4.使用RTT的接口修改掉原来的一些系统调用,具体如下:
-
单纯地替换接口是比较容易的(详见后面API对应表),只是在移植的过程中需要了解μCOS-II和RT-Thread在工程涉及的部分存在哪些差异,并按照RT-Thread的方式来更新这些地方。例如
uart的使用,以及系统的启动过程等。 -
说明一下
uart驱动的移植,涉及到两个驱动文件:usart.c和serail.c;在serail.c中定义了初始化、打开设备、数据收发等接口,由于接口中都是动态分配缓存的(rtconfig.h里面可以配置系统是否使用动态分配内存,但是关掉这个宏之后serail.c中相关接口会报错,因为函数定义被屏蔽掉了),所以需要打开RT_USING_HEAP这个宏定义。打开这个宏之后,我们来看看系统启动:-
startup_stm32f10x_hd.s中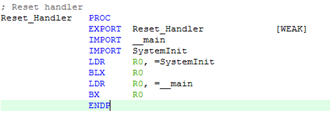
在
SystemInit()中初始化时钟频率中断向量表位置等。 -
components.c中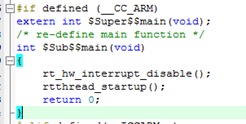
rtthread_startup()启动RT-Thread。 -
详细看看
rtthread_startup()里面的工作:rt_hw_board_init()板子初始化工作;rt_show_version()显示版本信息;rt_system_timer_init()定时器初始化;rt_system_scheduler_init()任务调度器初始化;rt_application_init()用户自定义的任务;rt_system_timer_thread_init()定时器线程初始化;rt_thread_idle_init()空闲任务初始化;rt_system_scheduler_start()开始任务调度;
-
任务调度开始之后,OS就启动好了,之后程序都在OS的管理下运行了。
-
接着说uart驱动,因为打开了
RT_USING_HEAP,我们需要对系统堆进行初始化:rt_system_heap_init((void*)HEAP_BEGIN,(void*)SRAM_END);//其中HEAP_BEGIN为堆起始地址,SRAM_END为结束地址
根据自己的MCU进行定义:
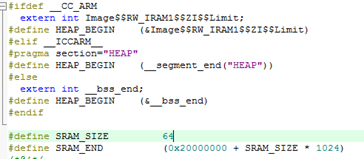
这样定义heap范围应将startup_stm32f10x_hd.s中heap size改为0。
-
然后是uart硬件层初始化
rt_hw_usart_init();//注册设备(uart1~uart5)
rt_console_set_device(RT_CONSOLE_DEVICE_NAME);//使能RT_CONSOLE_DEVICE_NAME//这个宏定义的uart口打印。
-
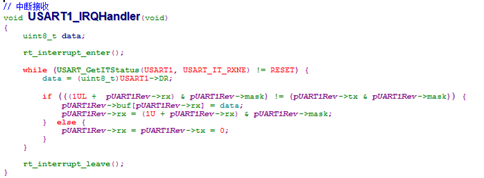
采用轮询方式发送,中断方式接收数据
5. 任务的创建与删除
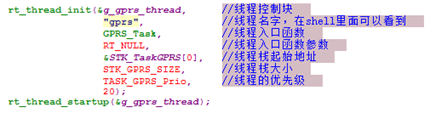
RT-Thread的任务管理分静态方法和动态方法,静态方法:
只能调用静态方法删除任务:

动态方法:

只能调用动态方法删除任务:
rt_err_t rt_thread_delete(rt_thread_tthread);
其他诸如SPI等驱动及事件、信号量等处理不再赘述。
二、μCOS-II与RT-Thread API对应表:(左侧μCOS-Ⅱ,右侧RT-Thread)
任务创建与删除:
|
OSInit(&err);初始化μC/OS-Ⅱ,对这个函数的调用必须在调用OSStart()函数之前。 |
分动态和静态方法, 动态方法: rt_thread_create(); rt_thread_delete(); 静态方法: rt_thread_init(); rt_thread_detach(); |
|
OSTaskCreate(); OSTaskDel(); |
|
|
OSStart();真正开始运行多任务。 |
rt_thread_startup(tid); |
任务挂起与恢复
|
OSTaskSuspend(); |
rt_thread_suspend(tid); |
|
OSTaskResume (); |
rt_thread_resume (tid); |
操作系统进入/退出“临界区”的功能代码:
|
OS_ENTER_CRITICAL(); |
rt_enter_critical (); |
|
OS_EXIT_CRITICAL(); |
rt_exit_critical (); |
ENTER ISR
|
OSIntEnter (); |
rt_interrupt_enter(); |
|
OSIntExit (); |
rt_interrupt_leave(); |
任务优先级:
μC/OS-Ⅱ和RT-Thread都是值越小优先级越高,但优先级数不同,μC/OS-Ⅱ支持最多64级,RT-Thread支持最多256级。
任务延时:
|
OSTimeDly();延时ticks |
rt_thread_delay ();延时ticks |
|
OSTimeDlyHMSM ();延时(时 分 秒 毫秒) |
事件:
μC/OS-Ⅱ
|
功能 |
信号量 |
互斥信号量 |
事件标志组 |
消息邮箱 |
消息队列 |
|
建立事件 |
OSSemCreate(); |
OSMutexCreate(); |
OSFlagCreate(); |
OSMboxCreate(); |
OSQCreate(); |
|
删除事件 |
OSSemDel (); |
OSMutexDel (); |
OSFlagDel (); |
OSMboxDel (); |
OSQDel (); |
|
等待事件 |
OSSemPend(); |
OSMutexPend(); |
OSFlagPend(); |
OSMboxPend(); |
OSQPend(); |
|
发送事件 |
OSSemPost(); |
OSMutexPost(); |
OSFlagPost(); |
OSMboxPost(); |
OSQPost(); |
|
无等待获得事件 |
OSSemAccept(); |
OSMutexAccept(); |
OSFlagAccept(); |
OSMboxAccept(); |
OSQAccept(); |
|
查询事件状态 |
OSSemQuery(); |
OSMutexQuery(); |
OSFlagQuery(); |
OSMboxQuery(); |
OSQQuery(); |
RT-Thread
|
功能 |
信号量 |
互斥信号量 |
事件标志组 |
消息邮箱 |
消息队列 |
|
建立事件 |
静态方法: rt_sem_init(); 动态方法: rt_sem_create(); |
静态方法: rt_mutex_init (); 动态方法: rt_mutex_create (); |
静态方法: rt_event_init (); 动态方法: rt_event_create (); |
静态方法: rt_mb_init (); 动态方法: rt_mb_create (); |
静态方法: rt_mq_init (); 动态方法: rt_mq_create (); |
|
删除事件 |
静态方法: rt_sem_detach(); 动态方法: rt_sem_delete(); |
静态方法: rt_mutex_detach (); 动态方法: rt_mutex_delete (); |
静态方法: rt_event_detach (); 动态方法: rt_event_delete (); |
静态方法: rt_mb_detach (); 动态方法: rt_mb_delete (); |
静态方法: rt_mq_detach (); 动态方法: rt_mq_delete (); |
|
等待事件 |
rt_sem_take(); |
rt_mutex_take(); |
rt_event_recv(); |
rt_mb_recv(); |
rt_mq_recv(); |
|
发送事件 |
rt_sem_release(); |
rt_mutex_release(); |
rt_event_send(); |
rt_mb_send_wait(); |
rt_mq_send(); rt_mq_urgent(); |
|
无等待获得事件 |
rt_sem_trytake(); |
rt_mb_send(); |
|||
|
查询事件状态 |
|||||
|
其他 |
rt_sem_control(); 执行cmd,目前函数里面只有一个RT_IPC_CMD_RESET实现 |
rt_mutex_control(); 目前函数直接返回err: return -RT_ERROR; |
rt_event_control(); 执行cmd,目前函数里面只有一个RT_IPC_CMD_RESET实现 |
rt_mb_control(); 执行cmd,目前函数里面只有一个RT_IPC_CMD_RESET实现 |
rt_mq_control(); 执行cmd,目前函数里面只有一个RT_IPC_CMD_RESET实现 |
整个移植过程就这样,最后谈下RT-Thread。
接触RT-Thread之后,个人还是蛮喜欢的,入门很快,编码风格很好。它是一个分层的操作系统,有丰富的系统组件,例如LwIP轻型TCP/IP协议栈、文件系统等,使用方便。
开发过程中对RT-Thread与μCOS最大的不同体验一个是在RT-Thread中的静态和动态方法的区分,另一个是内存安全性方面。以前项目跑在μCOS上很多double free的问题,μCOS不做任何警告,完全看不出来有什么问题,只是时间久了,系统复位;移植到RT-Thread上之后double free系统会assert,一次性解决了好些bug。
-
Nordic-RT-Thread5.1.0移植笔记2024-10-16 2643
-
RT-Thread文档_内核移植2023-02-22 689
-
RT-Thread学习笔记 RT-Thread的架构概述2022-07-09 6217
-
机智云设备移植RT-Thread2022-04-19 1951
-
如何创建RT-Thread Nano工程2022-03-19 5728
-
基于 Keil MDK 移植 RT-Thread Nano2022-01-26 1439
-
RT-Thread 应用笔记 - RTC Alarm 组件的使用2022-01-25 1060
-
HC32F460移植RT-Thread Nano+FinSh工程源码下载2022-01-05 1213
-
RT-Thread系统移植到STM32f1032021-12-09 1332
-
RT-Thread Nano入门学习笔记2021-11-26 1319
-
【国产MCU系列】在 HK32F030 上移植 RT-Thread Nano2021-11-21 1123
-
移植RT-Thread的原理与方法2021-09-17 10280
-
从μCOS-Ⅱ到RT-Threadの移植方法是什么2020-06-04 1743
全部0条评论

快来发表一下你的评论吧 !
