

STM32的三种串口通信协议介绍
控制/MCU
描述
STM32串口硬件电路
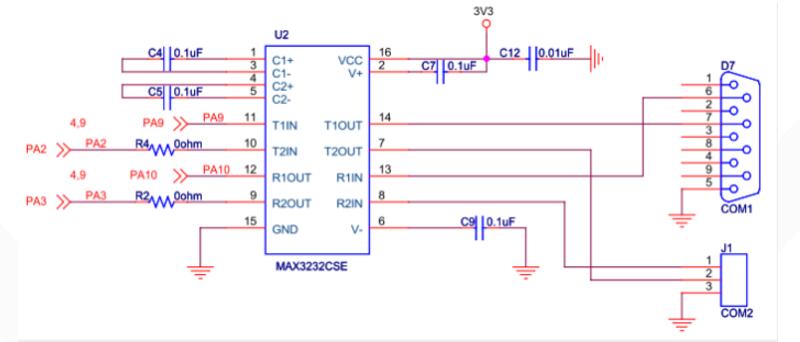
开发板串口硬件电路
STM32串口编程
1、整体流程
① 开启GPIO时钟和USARTX时钟
② 配置TX和RX引脚
③ 初始化USART控制器
2、细节实现
① 开启GPIO时钟和USARTX时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
② 配置TX和RX引脚
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
③ 初始化USART控制器
/* USART1 mode config */
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
STM32F的三种串口通信协议
1、USART
通用同步异步收发器(USART)提供了一种灵活的方法与使用工业标准NRZ异步串行数据格式的外部设备之间进行全双工数据交换。
USART支持同步单向通信和半双工单线通信,也支持LIN(局部互联网)、智能卡协议和IrDA(红外数据组织)SIR ENDEC规范,以及调制解调器(CTS/RTS)操作。
USART双向通信至少需要两个引脚:接收数据输入(RX)和发送数据输出(TX)。
同步模式下需要引脚:发送器时钟输出(CK)
IrDA模式需要引脚:数据输入(IrDA_RDI)、数据输出(IrDA_RDO)
USART特点:
1. 全双工操作(相互独立的接收数据和发送数据);
2. 同步操作时,可主机时钟同步,也可从机时钟同步;
3. 独立的高精度波特率发生器,不占用定时/计数器;
4. 支持5、6、7、8和9位数据位,1或2位停止位的串行数据桢结构;
5. 由硬件支持的奇偶校验位发生和检验;
6. 数据溢出检测;
7. 帧错误检测;
8. 包括错误起始位的检测噪声滤波器和数字低通滤波器;
9. 三个完全独立的中断,TX发送完成、TX发送数据寄存器空、RX接收完成;
10.支持多机通信模式;
11.支持倍速异步通信模式。
2、SPI
串口外围设备接口SPI是一种低成本,易使用的接口,主要用于微控制器与外围设备芯片之间的连接。SPI接口可以用来连接存储器、A/D转换器、D/A转换器、实时时钟日历、LCD驱动、传感器、音频芯片等。
SPI是一个四线接口:主机输出/从机输入(MOSI)、主机输入/从机输出(MISO)、串行SCLK或SCK、外设芯片(CS/)。
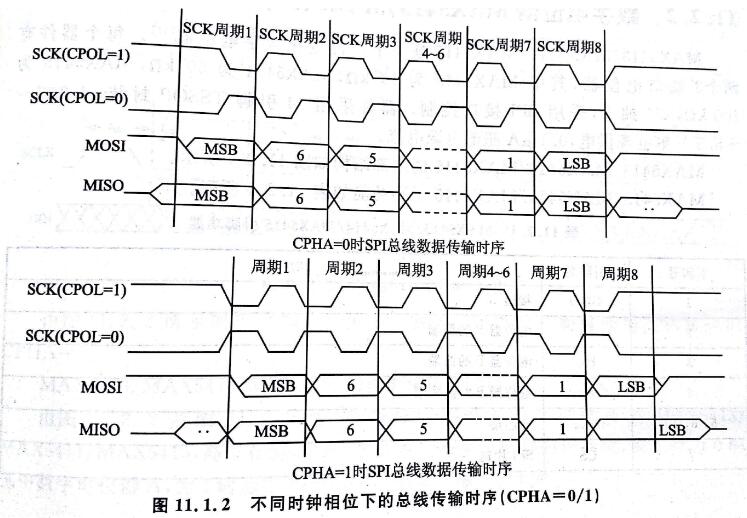
SPI是一个同步协议接口,所有的传输都参照一个共同的时钟,这个时钟信号由主机产生。SPI允许芯片与外部设备以半/全双工、同步、串行方式通信。
根据时钟极性和时钟相位的不同,SPI有4种工作模式,如图。
3、I2C
I2C总线是同步通信的一种特殊形式,具有接口少,控制简单,器件封装形式小、通信速率较高等优点。
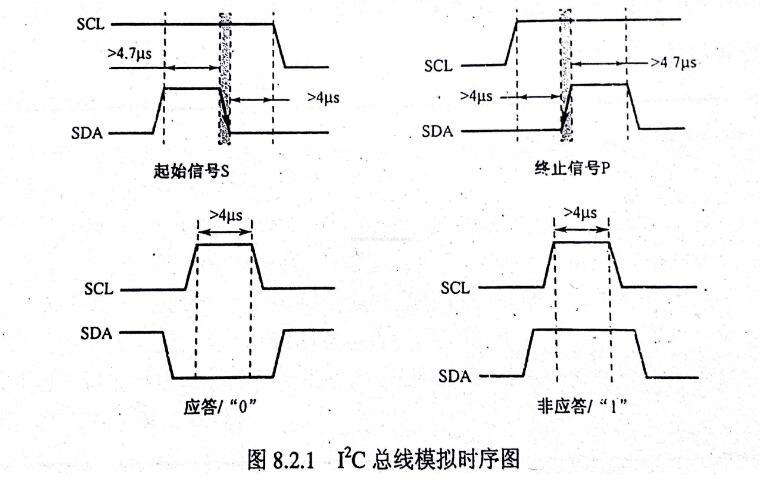
I2C总线由数据线SDA和时钟线SCL两条线构成通信线路,既可以发送数据,也可以接收数据。
I2C总线的操作模式:主发送模式、从接收模式、从发送模式、从接收模式。
I2C总线的模拟时序如下图:
STM32串口通信程序设计要点
1、要是能串口时钟同时要是能复用总线时钟和对应的IO时钟,如:
//使能串口1,PA,AFIO总线
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA |
RCC_APB2Periph_AFIO |
RCC_APB2Periph_USART1 ,
ENABLE);
2、stm32f10x_conf.h 中使能
#include “stm32f10x_usart.h”
#include “misc.h”
3、使能中断的话要配置NVIC,在中断函数中加入相应的程序。
简单的配置例程:
/**************************************************************
文件名:USART.c
功能:串口初始化配置以及相关函数
串口配置注意事项:
1、 stm32f10x_conf.h 中使能
#include “stm32f10x_usart.h”
#include “misc.h”
2、 本文件中定义的串口相关函数需要在头文件中做外部函数声明
***************************************************************/
#include “STM32Lib//stm32f10x.h”
void USART_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
USART_ClockInitTypeDef USART_ClockInitStructure;
//使能串口1,PA,AFIO总线
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA |
RCC_APB2Periph_AFIO |
RCC_APB2Periph_USART1 ,
ENABLE);
/* A9 USART1_Tx */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽输出-TX
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* A10 USART1_Rx */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入-RX
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_ClockInitStructure.USART_Clock = USART_Clock_Disable;
USART_ClockInitStructure.USART_CPOL = USART_CPOL_Low;
USART_ClockInitStructure.USART_CPHA = USART_CPHA_2Edge;
USART_ClockInitStructure.USART_LastBit = USART_LastBit_Disable;
USART_ClockInit(USART1, &USART_ClockInitStructure);
USART_Init(USART1, &USART_InitStructure);
/* Enable the USARTx */
USART_Cmd(USART1, ENABLE);
}
void USART1_Putc(unsigned char c)
{
USART_SendData(USART1, c);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET );
}
void USART1_Puts(char * str)
{
while(*str)
{
USART_SendData(USART1, *str++);
/* Loop until the end of transmission */
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
}
-
串口通信协议解析 串口通信应用实例2024-11-21 3690
-
UART串口通信协议是什么?2024-03-19 3740
-
Arduino常用的三种通信协议 12023-02-13 6950
-
串口通信协议的相关资料分享2022-02-22 2394
-
单片机系统中最常用的三种通信协议是什么?2022-02-17 2012
-
什么是串口通信?串口通信协议了解2022-02-15 1441
-
三种常见嵌入式设备通信协议是什么?2021-12-23 2002
-
嵌入式领域中常用的5种通信协议是什么2021-12-14 1918
-
基于STM32之UART串口通信协议(一)详解2021-11-30 1732
-
单片机系统中最常用的三种通信协议2021-11-18 2388
-
STM32中的通信协议是什么2021-08-18 2558
-
单片机C语言之串口通信协议2018-05-22 5522
-
基于状态机的串口通信协议的设计与实现2012-05-08 2290
-
串口通信协议详解2011-11-09 9165
全部0条评论

快来发表一下你的评论吧 !
