

 Amazing Hand:一个开源的3D打印仿真机械手项目
Amazing Hand:一个开源的3D打印仿真机械手项目
描述
“ 本文介绍了一款名为 Amazing Hand 的开源仿人机械手项目。该项目旨在解决市面上机器人手普遍昂贵且表现力不足的问题,提供一个低成本(低于200欧元)、轻量化(400克)且可完全3D打印的解决方案。 ”
项目采用 Apache 2.0 许可证
机械设计采用:知识共享署名 4.0 国际许可证。
项目仓库:https://github.com/pollen-robotics/AmazingHand
开始前插播一个小广告,有兴趣的小伙伴可以提前报名,华秋电子的小伙伴也会在工程师嘉年华和大家一起交流 KiCad 相关的主题。

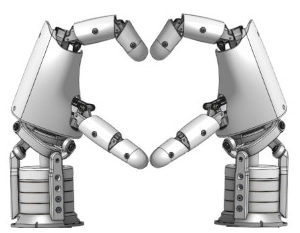
Amazing Hand 项目
机械手通常非常昂贵且表现力不足。更灵巧的手通常需要线缆和位于前臂的外部执行器。 本项目的目标是以合理的成本在真实机器人(比如 Reachy2)上探索仿人手的可能性。=> 手腕接口是为 Reachy2 的手腕(Orbita 3D)设计的,但也可以轻松适配其他机器人的手腕……
Amazing Hand 的特点是:
-
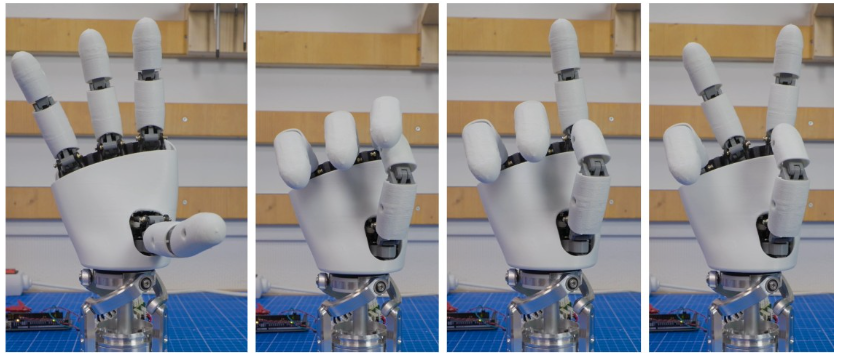
拥有 4 根手指的 8 自由度仿人手
-
每根手指有两个关节连接的指节
-
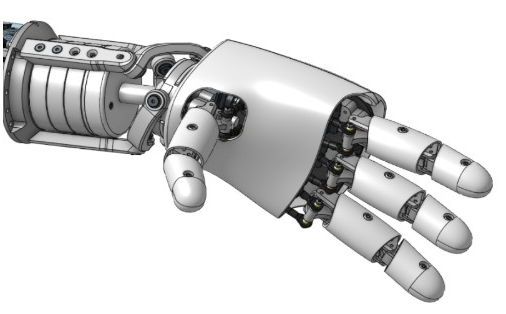
几乎处处采用柔性外壳
-
所有执行器内置于手掌内,无需任何线缆
-
可 3D 打印
-
重量 400 克
-
低成本 (<200欧)
-
开源
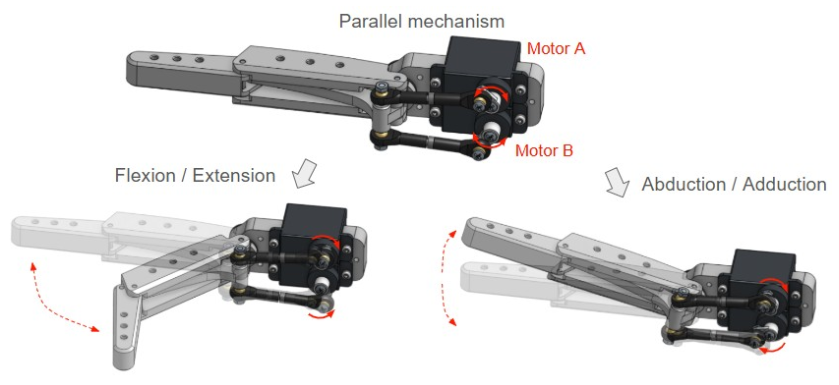
每根手指由并联机构驱动。这意味着每根手指使用 2 个小型的 Feetech SCS0009 舵机来控制其屈伸和内收/外展。
提供两种控制方式:
-
使用串行总线驱动器(例如 Waveshare)+ Python 脚本
-
使用 Arduino + Feetech TTL Linker
两种方式都提供了详细说明,并提供了基础演示软件。由您选择!
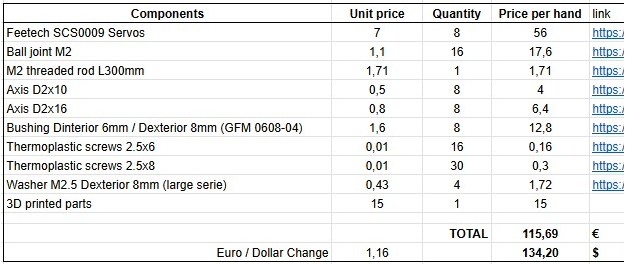
BOM
以下是 BOM 表:
https://docs.google.com/spreadsheets/d/1QH2ePseqXjAhkWdS9oBYAcHPrxaxkSRCgM_kOK0m52E/edit?gid=1269903342#gid=1269903342
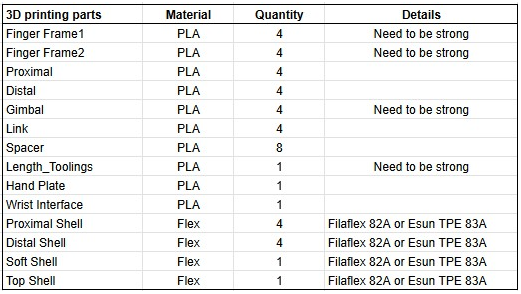
自定义 3D 打印部件的详细信息在这儿:
https://docs.google.com/spreadsheets/d/1QH2ePseqXjAhkWdS9oBYAcHPrxaxkSRCgM_kOK0m52E/edit?gid=2050623549#gid=2050623549
以下是如何打印所有所需自定义部件的指南:
https://github.com/pollen-robotics/AmazingHand/blob/main/docs/AmazingHand_3DprintingTips.pdf
KiCad 6之后,原理图与PCB的双向同步可以直接进行,无需导出网表。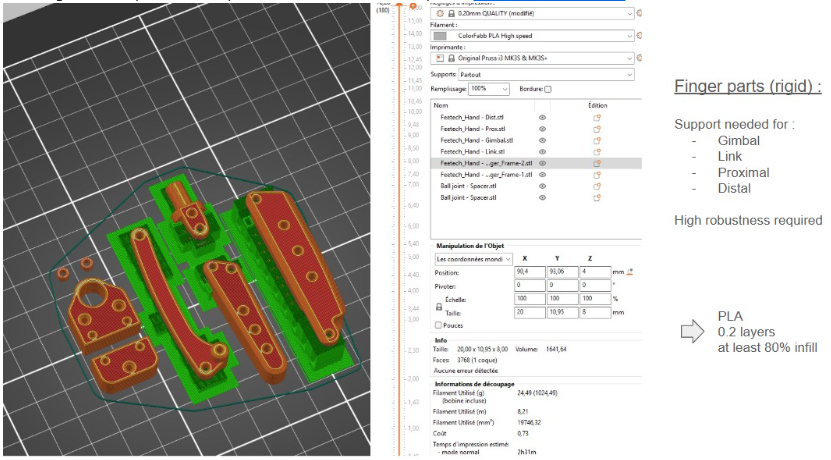
CAD 文件和 OnShape 文档
STL 和 STEP 文件可在此处找到:
https://github.com/pollen-robotics/AmazingHand/tree/main/cad
请注意,如果您想制作左手,手指部分是相同的,但有些部件是镜像对称的。右手专用部件以“R”开头,左手部件以“L”开头。
 大家也可以访问 Onshape 文档:
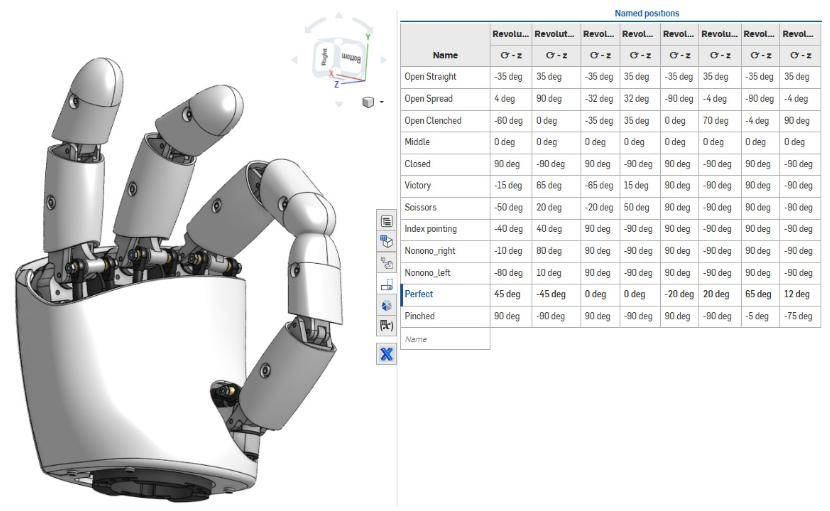
大家也可以访问 Onshape 文档:https://cad.onshape.com/documents/430ff184cf3dd9557aaff2be/w/e3658b7152c139971d22c688/e/bd399bf1860732c6c6a2ee45?renderMode=0&uiState=6867fd3ef773466d059edf0c
注意,在“命名位置”工具中提供了预定义位置及其对应的舵机角度。
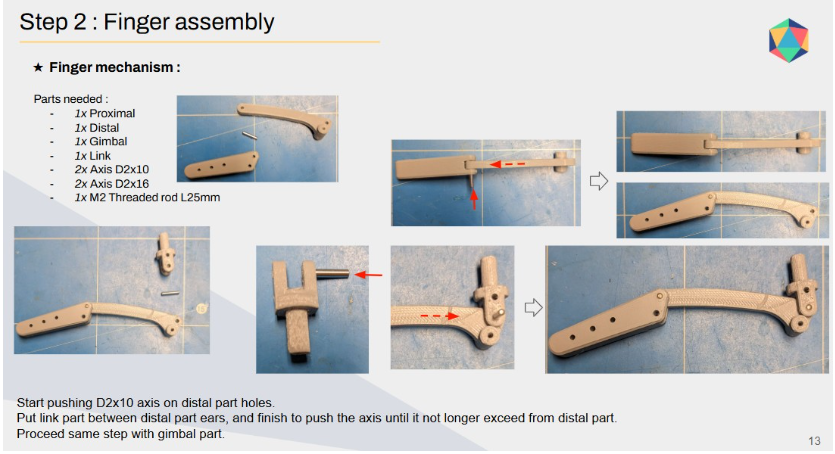
装配指南
结合 BOM 中标准组件的 Amazing Hand 组装指南在此处:
https://github.com/pollen-robotics/AmazingHand/blob/main/docs/AmazingHand_Assembly.pdf
您将需要简单的程序/脚本来校准每根手指,可在此处获取:
-
使用 Python 和 Waveshare 串行总线驱动器
-
使用 Arduino 和 TTLinker:
请注意,本组装指南针对的是独立的右手。
如果您需要制作一只独立的左手,可以为舵机位置保留相同的 ID,然后在软件中选择是右手还是左手。
但是,如果您需要同时制作左右手并将其连接到机器人上,则必须为左右手的舵机分配不同的 ID。在同一条串行总线上,不同的舵机不能有相同的 ID……
运行 Demo
Demo 提供 Python 和 Arduino 两个版本。 您需要外部电源来为手掌内的 8 个执行器供电。 如果您还没有,一个简单的外部电源可以是带插孔连接器的 DC/DC 220V -> 5V / 2A 适配器。请查看物料清单:
https://docs.google.com/spreadsheets/d/1QH2ePseqXjAhkWdS9oBYAcHPrxaxkSRCgM_kOK0m52E/edit?gid=1269903342#gid=1269903342
Python 脚本:
https://github.com/pollen-robotics/AmazingHand/tree/main/ArduinoExample
Arduino 程序:
https://github.com/pollen-robotics/AmazingHand/tree/main/PythonExample
对于使用逆向/正向运动学的更高级用法,Demo 目录中有几个示例,以及一些用于测试/配置电机的实用工具:
https://github.com/pollen-robotics/AmazingHand/blob/main/Demo
待办事项列表-
设计一个带有串行集线器和供电功能的小型定制 PCB,以将所有部件集成到手掌中
-
进行抓取任务测试 => 基于可用的电机反馈,为闭合手掌添加更智能的行为
-
研究实现 4 种不同手指长度或增加第五根手指的可能性
-
研究使用 STS3032 Feetech 舵机替代 SCS0009 的可能性 => 体积相近但动力更强,但舵机摇臂不同
-
研究通过用弹簧替换刚性连杆来增加柔顺性的可能性
-
添加指尖传感器,将智能控制提升到一个新水平
-
分享一些开源3D打印创新2021-12-21 1523
-
PLC控制机械手设计2008-12-13 2924
-
机械手资料2010-03-31 1265
-
2018年3D打印行业新局势 大规模3D打印电动汽车量产2018-03-27 1273
-
3个最酷的3D打印Arduino项目介绍2019-12-03 7190
-
神奇的软体康复机械手套——采用ACEO® 有机硅3D打印的软体机器人2020-05-15 3015
-
一个开源的拟人机器人仿生手系统HRI-hand2021-04-25 1504
-
用于创建3D打印机械臂的开源项目2022-07-20 937
-
3D打印机三相电机控制器开源项目2022-08-17 789
-
3D打印的SCARA手臂下棋开源项目2022-10-21 1088
-
灯塔3D打印和Arduino开源分享2022-11-02 810
-
手势控制机械手开源分享2022-11-11 865
-
基于Arduino的无线手势控制机械手臂2022-12-20 1663
-
pArm项目之3D打印的机械臂2023-01-04 462
-
3D打印底盘开源分享2023-07-06 788
全部0条评论

快来发表一下你的评论吧 !
