

芯明天压电纳米技术如何破解光子芯片激光修复的难题
电子说
描述
光子集成电路(PIC)正在逐渐成为5G基站、数据中心光模块的核心组件。然而一片厘米见方大小的芯片上就集成着上千个精密光子元件,制造时微小的差距和材料的缺陷都会导致产出性能不达标的残次品,此时就需要有针对性的对有缺陷的芯片进行修复。激光修复的技术更迭,给光芯片生产、制造和后续改良提供了极大的支撑。
一、光子集成电路的“芯”机遇与挑战
1.光子集成电路的定义与组成
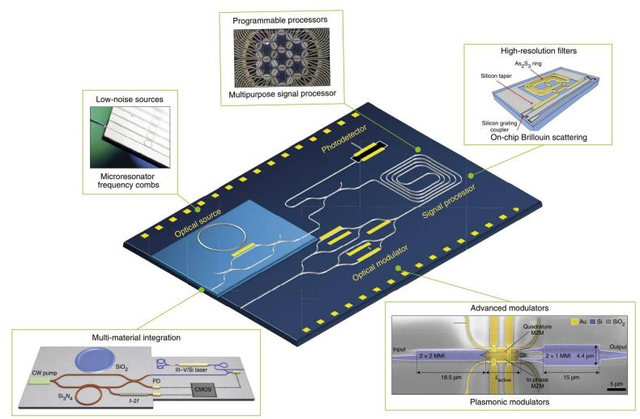
光子集成电路(Photonic Integrated Circuit,PIC),区别于传统的电子集成电路(IC)由晶体管、电容器和电阻器等各种电子元件集成,它是一种将多个光子学组件和功能集成在单个芯片上的紧凑型集成器件。光子集成电路中的光学或光电子器件包括:激光器、电光调制器、光电探测器、光衰减器、光复用器/解复用器、光放大器。
这些器件通过光波导连接,形成光子电路,实现光信号的产生、传输、探测和处理。光子集成电路中的信息,是以光信号的形式进行创建、调制和测量的。
(注:图片来源于网络)
2.光子集成电路的应用
光子集成电路(PIC)在近年来已经逐渐发展为一项成熟且强大的技术,作为下一代信息技术的核心,正以光信号替代传统电子模式,实现更高速度、更低功耗的数据传输与处理,广泛应用于计算、通信、医疗、自动驾驶等领域。
光芯片的应用场景包括但不限于以下几个方面:数据中心、AI算力、5G/6G通信、自动驾驶、生物医疗和量子计算等等。
(注:图片来源于网络)
3.光子集成电路面临的问题
在光芯片的设计与制造中,波导作为光信号传输的核心路径,其材料的选择与具体应用场景及芯片功能需求密切相关。不同场景下的光芯片,对波导材料的光学性能、物理特性要求差异显著,因此会选用各具优势的材料:硅、铌酸锂、二氧化硅、以磷化铟和砷化镓为代表的III-V族半导体、氮化硅以及各类聚合物等,都是常见的波导材料。
(注:图片来源于网络)
然而,随着光芯片的波导尺寸进入亚微米级别——相当于头发丝直径的千分之一甚至更小,这种极小的尺度使其对制造过程中的细微偏差异常敏感。具体来说,无论是制造环节中的公差波动(比如刻蚀精度的微小偏离)、不同材料膜层间的应力积累,还是材料本身存在的微观缺陷(如晶格错位、杂质颗粒),哪怕是微米级甚至纳米级的偏差,都可能对波导的导光性能产生显著影响。
(注:图片来源于网络)
这种高度敏感性直接带来了生产上的挑战:一方面,会导致大量性能未达设计标准的残次品出现;另一方面,同一晶圆上不同位置的芯片性能也会呈现明显差异——有的信号传输损耗低、响应速度快,有的却损耗过高、反应迟缓,一致性大打折扣。最终,这会造成光芯片的性能波动范围扩大、生产良率偏低,而良率不足又会进一步推高单位芯片的制造成本,在一定程度上制约了光芯片的规模化应用。

(注:图片来源于网络)
二、光子集成电路激光修复
在光芯片制造完成后,通常需要对生产过程中产生的误差进行校正,其核心思路是通过改变波导或包层材料的折射率来实现。目前最常用的修复手段中,利用热光效应调节的方法较为普遍。然而,这种方法存在明显短板:一方面,它会使得修复系统的复杂程度大幅提升,同时增加光芯片的修复功耗;另一方面,其调控范围极为有限,仅能作用于那些带有加热结构的特定光波导位置。这不仅直接影响光芯片系统的成本效益,导致设备投入和运行成本攀升,还会制约芯片修复的精度,难以满足高精度光芯片的修复需求。因此,探索一种更为高效的芯片修复技术便成为行业的迫切需求。

(注:图片来源于网络)
激光修复技术具有独特的性能优势,其超短的脉冲持续时间、超高的峰值功率以及亚微米量级的加工精度,让它能够在金属、半导体、透明介质等多种材料的表面或内部完成非接触式的加工、改性及后加工等操作。
(注:图片来源于网络)
三、芯明天压电纳米技术:激光修复的“黄金搭档”
光芯片激光修复配置包括测试光源、放置光芯片的纳米级多轴联动位移台以及接收设备,多轴联动位移台进行微调来确定光芯片中需要修正的结构位置,可上下移动的物镜来确保聚焦点的位置及大小。

(注:图片来源于网络)
芯明天压电纳米技术核心优势:
纳米级定位精度:光子波导宽度通常为亚微米级,修复光斑需精确聚焦至微米甚至纳米级别,传统定位系统难以胜任。
毫秒级响应:激光修复需根据实时光学反馈动态修正路径,要求定位系统响应速度非常快。
超高稳定性:一体化的结构设计提供高刚性、高负载能力,确保修复过程中的稳定性和可靠性。
多轴协同控制:可同时进行多个轴向的运动,实现复杂修复路径的精确执行。
芯明天压电纳米定位台
P65系列高分辨率压电纳米定位台是以压电陶瓷作为驱动源,结合柔性铰链机构可实现X轴、Y轴和Z轴三维精密运动的压电平台,驱动形式为放大机构式驱动。内置高性能压电陶瓷,可实现XY200μm、Z50μm的位移。开/闭环版本可供选择,真空版本可定制,更大行程版本可定制。闭环定位精度可达XY0.017%F.S.、Z0.006%F.S.,非常适合高精度定位应用。

特点
▲X、Y、Z三维运动
▲行程:XY200μm/Z50μm
▲承载能力:1kg
▲开/闭环版本可选
▲真空版本可选,参数可定制
型号举例
| 型号 | P65.XY200Z50S |
| 运动自由度 | X、Y、Z |
| 驱动控制 | 8路驱动,8路传感 |
| 标称行程范围(0~120V) | XY160μm/Z40μm |
| Max.行程范围上限(0~150V) | XY200μm/Z50μm |
| 传感器类型 | SGS |
| 分辨率 | XY3nm/Z2nm |
| 闭环线性度 | XY0.015%F.S./Z0.007%F.S. |
| 闭环重复定位精度 | XY0.017%F.S./Z0.006%F.S. |
| 俯仰/偏航/滚动 | <10μrad |
| 空载谐振频率 | X260Hz/Y220Hz/Z280Hz |
| 带载谐振频率@500g | 150Hz |
| 闭/开环空载阶跃时间 | 100ms@500g |
| 承载能力 | 1kg |
| 静电容量 | XY13.6μF/Z3.2μF |
| 材质 | 钢、铝 |
| 重量 | 1.24kg |
芯明天六轴压电纳米定位台
H64系列超高分辨率压电纳米定位台是以压电陶瓷作为驱动源,结合柔性铰链机构可实现X轴、Y轴、Z轴、θx、θy和θz六维精密运动的压电平台,驱动形式为放大机构式驱动。开/闭环版本可供选择,闭环定位精度可达0.1%F.S.,非常适合高精度定位应用。

特点
▲X、Y、Z、θx、θy、θz六轴运动
▲可选配闭环反馈传感器
▲承载能力达10kg
▲超高分辨率
型号举例
| 型号 | H64.XYZTR0S |
| 运动自由度 | X、Y、Z、θx、θy、θz |
| 驱动控制器 | 6路驱动,6路传感 |
| XYZ标称行程范围(0~120V) | XY14.4μm/Z30μm |
| XYZ Max.行程范围(0~150V) | XY18μm/Z37.5μm |
| θxθyθz轴标称偏转角度(0~120V) | θxθy0.32mrad(≈66秒)/θz1.3mrad(≈268秒) |
| θxθyθz轴Max.偏转角度(0~150V) | θxθy0.4mrad(≈83秒)/θz1.6mrad(≈330秒) |
| 传感器 | SGS |
| 闭环直线分辨率 | XY0.6nm/Z1.25nm |
| 闭环偏转分辨率 | θxθy13nrad/θz50nrad(<0.01秒) |
| 闭环线性度 | 直线可达0.02%F.S./偏转可达0.1%F.S. |
| 闭环重复定位精度 | 直线可达0.06%F.S./偏转可达0.1%F.S. |
| 静电容量 | XY6.8μF/θxθyZ14.2μF/θz62.5μF |
| 承载能力 | 10kg |
| 空载谐振频率 | >150Hz |
| 带载谐振频率@10kg | >100Hz |
| 闭环阶跃时间 | 可达60ms |
| 重量 | 9.5kg(不含线) |
| 材质 | 钢、铝合金 |
芯明天压电物镜定位器
芯明天P76系列为大负载Z轴运动压电物镜定位器,专门为物镜聚焦显微而设计,具有超高聚焦稳定性,负载能力可达900g,Z轴直线运动范围可达200μm,采用柔性铰链设计机构,无摩擦,直线性好,闭环型号定位精度高。分离式螺纹适配器设计,可适配多种型号的显微镜。

特点
▲行程可达200μm
▲承载能力900g
▲毫秒级响应时间
▲闭环重复定位精度高
▲聚焦稳定性好
型号举例
| 型号 | P76.Z100S |
| 运动自由度 | Z |
| 驱动控制 | 1路驱动,1路传感 |
| 标称行程范围(0~120V) | 80μm |
| Max.行程范围(0~150V) | 100μm |
| 传感器类型 | SGS |
| 分辨率 | 2nm |
| 闭环线性度 | 0.03%F.S. |
| 闭环重复定位精度 | 0.02%F.S. |
| 推/拉力 | 70N |
| 运动方向刚度 | 0.8N/μm |
| 空载谐振频率 | 800Hz |
| 闭环工作频率(-3dB) | 160Hz(空载) |
| 闭/开环空载阶跃时间 | 5ms |
| 承载能力 | 0.5kg |
| 静电容量 | 7.2μF |
| 材质 | 钢、铝 |
| 重量 | 500g |
注:以上参数是采用E00/E01系列压电控制器测得。最大驱动电压可在 -20V~150V;对于高可靠的长期使用,建议驱动电压在 0~120V。
芯明天压电马达位移台
N31系列直线压电马达位移台,内部采用PZT压电式驱动,直线运动行程可选,最大可达100mm,并且可达纳米级分辨率。可选配闭环伺服传感器,具有更高的定位精度。可根据需求选择维度,支持一维至三维自由组合。

特点
▲大出力
▲闭环误碰后自动归位
▲可软件操作自动找零位
▲可选光栅闭环
▲耐磨材料
▲可选二/三维
▲可定制真空版本
▲断电自锁
型号举例
| 型号 | N31.100E |
| 运动自由度 | X |
| 集成传感器类型 | 光栅传感器 |
| 标称行程范围 | 100mm或±50mm |
| 速度上限 | 5mm/s |
| 闭环分辨率 | <50nm |
| 线性度 | 2μm |
| 重复度 | 2μm |
| 推/拉力(主动) | 30N |
| 保持力(被动) | 40N |
| Max.承载(水平方向) | 5Kg |
| 工作温度 | 0~50℃ |
审核编辑 黄宇
-
纳米技术的应用领域2018-09-21 3826
-
芯明天精密压电驱动控制系统2020-04-27 1976
-
压电纳米定位系统的特点以及应用领域分析2020-07-06 3326
-
芯明天低温4K三维扫描压电纳米定位台!2022-01-06 1930
-
六轴压电纳米运动平台的详细介绍2022-02-10 3091
-
真空版压电纳米定位台的设计方案2022-04-20 1696
-
【芯明天纳米级微运动】之【压电纳米定位台】2022-11-01 3273
-
纳米技术对光学和光子技术的影响2022-12-28 2654
-
芯明天小体积、低温压电纳米定位台及其量子应用等2023-03-01 2099
-
与ChatGPT聊一聊压电纳米运动技术2023-03-09 2235
-
压电纳米定位台在数据存储中的应用!2023-04-26 1739
-
新品推荐|XD770.300S大负载压电纳米定位台2023-05-11 1807
-
Aigtek功率放大器在压电纳米电机领域有哪些应用2025-02-11 868
-
压电纳米技术如何升级进化光纤开关2025-08-28 702
-
芯明天压电纳米定位台:助力六方氮化硼单光子源研究2025-10-23 467
全部0条评论

快来发表一下你的评论吧 !
