

 第二十九章 W55MH32 Modbus_TCP_Server示例
第二十九章 W55MH32 Modbus_TCP_Server示例
描述
单芯片解决方案,开启全新体验——W55MH32 高性能以太网单片机
W55MH32是WIZnet重磅推出的高性能以太网单片机,它为用户带来前所未有的集成化体验。这颗芯片将强大的组件集于一身,具体来说,一颗W55MH32内置高性能Arm® Cortex-M3核心,其主频最高可达216MHz;配备1024KB FLASH与96KB SRAM,满足存储与数据处理需求;集成TOE引擎,包含WIZnet全硬件TCP/IP协议栈、内置MAC以及PHY,拥有独立的32KB以太网收发缓存,可供8个独立硬件socket使用。如此配置,真正实现了All-in-One解决方案,为开发者提供极大便利。
在封装规格上,W55MH32 提供了两种选择:QFN100和QFN68。
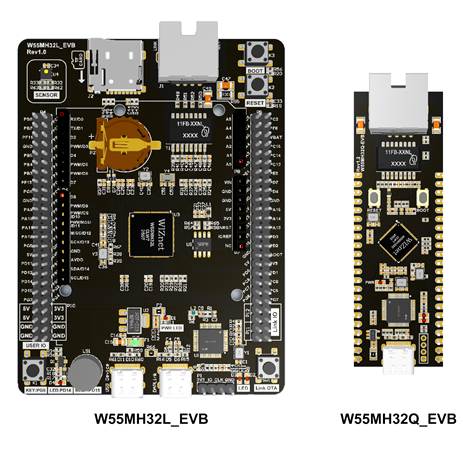
W55MH32L采用QFN100封装版本,尺寸为12x12mm,其资源丰富,专为各种复杂工控场景设计。它拥有66个GPIO、3个ADC、12通道DMA、17个定时器、2个I2C、5个串口、2个SPI接口(其中1个带I2S接口复用)、1个CAN、1个USB2.0以及1个SDIO接口。如此丰富的外设资源,能够轻松应对工业控制中多样化的连接需求,无论是与各类传感器、执行器的通信,还是对复杂工业协议的支持,都能游刃有余,成为复杂工控领域的理想选择。 同系列还有QFN68封装的W55MH32Q版本,该版本体积更小,仅为8x8mm,成本低,适合集成度高的网关模组等场景,软件使用方法一致。更多信息和资料请进入http://www.w5500.com/网站或者私信获取。
此外,本W55MH32支持硬件加密算法单元,WIZnet还推出TOE+SSL应用,涵盖TCP SSL、HTTP SSL以及 MQTT SSL等,为网络通信安全再添保障。
为助力开发者快速上手与深入开发,基于W55MH32L这颗芯片,WIZnet精心打造了配套开发板。开发板集成WIZ-Link芯片,借助一根USB C口数据线,就能轻松实现调试、下载以及串口打印日志等功能。开发板将所有外设全部引出,拓展功能也大幅提升,便于开发者全面评估芯片性能。
若您想获取芯片和开发板的更多详细信息,包括产品特性、技术参数以及价格等,欢迎访问官方网页:http://www.w5500.com/,我们期待与您共同探索W55MH32的无限可能。
第二十九章 W55MH32 Modbus_TCP_Server示例
本篇文章,我们将详细介绍如何在W55MH32芯片上面实现Modbus TCP协议。并通过实战例程,为大家讲解如何在W55MH32上使用Modbus TCP作为服务器,监听端口,与客户端进行通信。
该例程用到的其他网络协议,如DHCP,请参考相关章节。有关 W55MH32 的初始化过程,请参考 Network Install 章节,这里将不再赘述。
1 Modbus TCP简介
Modbus TCP是一种基于以太网的通信协议,它是经典Modbus协议的扩展。Modbus协议最初由Modicon公司在1979年开发,广泛应用于工业自动化系统,用于实现不同设备之间的数据通信。Modbus TCP结合了Modbus协议的简单性和以太网的高效性,是一种开放、标准化且广泛使用的工业通信协议。
2 Modbus TCP的基本原理
Modbus TCP使用TCP/IP协议栈进行通信,运行在OSI模型的传输层(TCP层)之上。设备之间通过以太网接口连接,数据通过TCP端口(通常是502端口)传输。
主从架构:
主机(Master):主动发起请求的设备(通常是PLC或工业PC)。
从机(Slave):响应主机请求的设备(如传感器、执行器、IO模块)。
数据传输: 主机向从机发送请求,从机解析后执行相应操作,并返回结果。通信过程包括功能码、地址、数据值和错误校验等内容。
3 Modbus TCP的优势
开放性: 不需要支付许可证费用,广泛支持。
简洁性: 数据格式简单易懂,开发和维护成本低。
兼容性: 支持多种工业设备和系统。
实时性: 基于TCP/IP,通信速度快,延迟低。
可扩展性: 能够集成到基于以太网的工业网络中。
4 注意事项
通信可靠性: TCP连接可能存在断开或超时的情况,需要进行异常处理。
数据安全性: Modbus TCP本身不包含加密机制,可使用TLS等协议增加安全性。
设备地址: 每个从机需要唯一的单元标识符(Unit Identifier)。
网络配置: 需正确设置IP地址、子网掩码和网关。
Modbus TCP因其高效性和兼容性,已成为工业物联网(IIoT)和工业4.0中不可或缺的一部分。
5 应用场景
接下来,我们了解下在W55MH32上,可以使用Modbus TCP协议完成哪些操作及应用呢?
1. 工业自动化控制系统(PLC、SCADA等):通过与PLC和SCADA系统集成,W55MH32可以实现设备的实时监控与控制,支持生产线的参数调整、启动和停止等操作,同时能够采集传感器数据并上传至控制系统,用于分布式管理和优化工业流程。
2. 智能楼宇自动化(HVAC系统、能源管理):W55MH32可连接楼宇的HVAC设备,支持远程调节空调和通风系统,并采集电力、水、气等能耗数据,上传至能源管理系统,帮助优化楼宇能效。此外,还可集成智能照明和安防传感器,实现更智能的楼宇管理。
3. 数据采集与监控(远程I/O模块、传感器网络):通过远程I/O模块,W55MH32能够采集温度、压力、湿度等多种传感器数据,并实现远程监控与报警功能。采集的数据还能用于设备健康状态分析,支持预测性维护,提升设备可靠性。
4. 工业设备互联(变频器、伺服驱动器):W55MH32可与变频器、伺服驱动器等设备通信,实现参数调节和运行状态监控,支持高精度的运动控制和状态反馈。同时,作为中转站,它还能实现不同设备之间的互联互通,构建开放的工业互联生态。
6 Modbus TCP报文结构
Modbus TCP报文由以下几个部分组成:
事务处理标识符(2字节):用于标识请求与响应之间的配对。主机在请求中设置一个唯一的标识符,从机在响应中回传相同的值,方便主机识别对应的响应。
协议标识符(2字节):通常为0x0000,表示该报文使用的是Modbus协议。
长度字段(2字节):表示后续数据的字节数(不包括事务处理标识符和协议标识符)。
单元标识符(1字节):标识目标从机设备的地址。在Modbus TCP中,该字段通常用于区分逻辑设备。
功能码(1字节):定义当前操作的类型(如读写寄存器等)。
数据部分(可变长度):包含具体的操作数据,例如寄存器地址、要读取或写入的值等。
7 Modbus TCP常用功能码
功能码 0x01:读取线圈状态,用于读取从机设备中的一组线圈状态(0或1)。
功能码 0x02:读取离散输入,用于读取从机设备中的一组离散输入状态(只读,0或1)。
功能码 0x03:读取保持寄存器,用于读取从机设备中的一组保持寄存器值(通常是可读写的数值)。
功能码 0x04:读取输入寄存器,用于读取从机设备中的一组输入寄存器值(只读数据)。
功能码 0x05:写单个线圈,用于写入从机设备中的一个线圈状态(设置为0或1)。
功能码 0x06:写单个寄存器,用于向从机设备中的一个保持寄存器写入数据。
功能码 0x0F:写多个线圈,用于同时写入从机设备中的多个线圈状态。
功能码 0x10:写多个寄存器,用于同时向从机设备中的多个保持寄存器写入数据。
8 实现过程
接下来,我们在W55MH32上实现Modbus TCP协议服务器模式:
注意:测试实例需要PC端和W55MH32处于同一网段。
步骤一:初始化并注册LED相关函数
1. user_led_init(); 2. 3. user_led_control_init(get_user_led_status, set_user_led_status); 4.
在程序初始化部分添加LED所使用的GPIO外设初始化和注册设置、获取LED状态的函数,用于在接收到特定的Modbus TCP数据时进行状态的显示。
user_led_control_init()函数如下:
1. void user_led_control_init(int (*get_fun)(void), void (*set_fun)(uint32_t))
2. {
3. if (get_fun != NULL && set_fun != NULL)
4. {
5. getUserLED_cb = get_fun;
6. setUserLED_cb = set_fun;
7. }
8. }
user_led_control_init()为LED控制初始化函数,允许用户注册两个回调函数:一个用于获取LED状态,另一个用于设置LED状态。这些回调函数将在get_led_status()和set_led_status()函数中被调用。函数如下:
1. int get_led_status(void)
2. {
3. return getUserLED_cb();
4. }
5. void set_led_status(int32_t val)
6. {
7. setUserLED_cb(val);
8. }
get_led_status()和set_led_status()为获取和设置LED状态的函数,get_led_status()函数调用注册的获取LED状态的回调函数,并返回其返回值。set_led_status()函数调用注册的设置LED状态的回调函数,并传入新的状态值。
步骤二:主循环调用do_Modbus()函数
1. while (1)
2. {
3. do_Modbus(SOCKET_ID);
4. }
在循环中不断执行do_Modbus()函数的操作,用于处理Modbus TCP通信,根据套接字的不同状态执行相应的操作,包括监听连接请求、处理连接建立事件、接收和处理数据以及关闭连接等。
步骤三:进入do_Modbus()函数,处理接收的报文
1. void do_Modbus(uint8_t sn)
2. {
3. uint8_t state = 0;
4. uint16_t len;
5. getSIPR(lip);
6. state = getSn_SR(sn);
7. switch (state)
8. {
9. case SOCK_SYNSENT:
10. break;
11. case SOCK_INIT:
12. listen(sn);
13. if (!b_listening_printed)
14. {
15. b_listening_printed = 1;
16. printf("Listening on %d.%d.%d.%d:%drn",
17. lip[0], lip[1], lip[2], lip[3], local_port);
18. }
19. break;
20. case SOCK_LISTEN:
21. break;
22. case SOCK_ESTABLISHED:
23. if (getSn_IR(sn) & Sn_IR_CON)
24. {
25. setSn_IR(sn, Sn_IR_CON);
26. printf("Connectedrn");
27. getSn_DIPR(sn, rip);
28. port = getSn_DPORT(sn);
29. printf("RemoteIP:%d.%d.%d.%d Port:%drn", rip[0], rip[1], rip[2], rip[3], port);
30.
31. if (b_listening_printed)
32. b_listening_printed = 0;
33. }
34. len = getSn_RX_RSR(sn);
35. if (len > 0)
36. {
37. mbTCPtoEVB(sn);
38. }
39. break;
40. case SOCK_CLOSE_WAIT:
41. disconnect(sn);
42. break;
43. case SOCK_CLOSED:
44. case SOCK_FIN_WAIT:
45. close(sn);
46. socket(sn, Sn_MR_TCP, local_port, Sn_MR_ND); // Sn_MR_ND
47. break;
48. default:
49. break;
50. }
51.
首先,程序会获取本地IP地址和指定socket的状态,根据socket的状态,执行相应的操作。例如,如果socket处于监听状态,则开始监听;如果处于已建立连接状态,则处理接收到的数据。在处理已建立连接状态时,检查是否有新的连接请求,并打印连接信息(包括远程IP地址和端口号)。如果有接收到的数据,则调用mbTCPtoEVB()函数检查Modbus TCP数据并执行对应操作。mbTCPtoEVB()函数内容如下:
1. void mbTCPtoEVB(uint8_t sn)
2. {
3. if (MBtcp2evbFrame() != 0) // Frame received complete
4. {
5. if (pucASCIIBufferCur[0] == 0x01) // Check whether the device address is 0x01
6. {
7. if ((uint8_t)pucASCIIBufferCur[1] == 0x05) // Write to a single device
8. {
9. if ((uint8_t)pucASCIIBufferCur[4] == 0xff)
10. {
11. set_led_status(0);
12. printf("LED ONrn");
13. }
14. else if ((uint8_t)pucASCIIBufferCur[4] == 0x00)
15. {
16. set_led_status(1);
17. printf("LED OFFrn");
18. }
19. send(sn, recv_data, recv_len);
20. }
21. else if ((uint8_t)pucASCIIBufferCur[1] == 0x01) // Read Write to a single device
22. {
23. if (recv_data[recv_len - 1] != 0x01)
24. {
25. printf("len error!%xrn", recv_data[recv_len - 1]);
26. }
27. else
28. {
29. printf("Read OK!rn");
30. send_data[0] = recv_data[0];
31. send_data[1] = recv_data[1];
32. send_data[2] = recv_data[2];
33. send_data[3] = recv_data[3];
34. send_data[4] = 0x00;
35. send_data[5] = 0x04;
36. send_data[6] = 0x01;
37. send_data[7] = 0x01;
38. send_data[8] = 0x01;
39. send_data[9] = ~get_led_status();
40. send_len = 10;
41. send(sn, send_data, send_len);
42. memset(send_data, 0, send_len);
43. }
44. }
45. else
46. {
47. printf("error code!rn");
48. }
49. }
50. else
51. {
52. printf("address error!rn");
53. }
54. }
55. }
56.
mbTCPtoEVB()函数用于处理从Modbus TCP接收到的数据,根据数据内容执行相应的操作,包括写单个设备和读单个设备操作,并根据操作结果发送响应数据。比如在接收到一段Modbus TCP数据之后,首先会进行检查、比对,符合预设的值时,对LED进行开或关的状态设置,并打印相应的信息,再调用send()函数将接收到的数据原样发送回去。如果接收到的数据不符合预期,会打印相应的错误信息。
9 运行结果
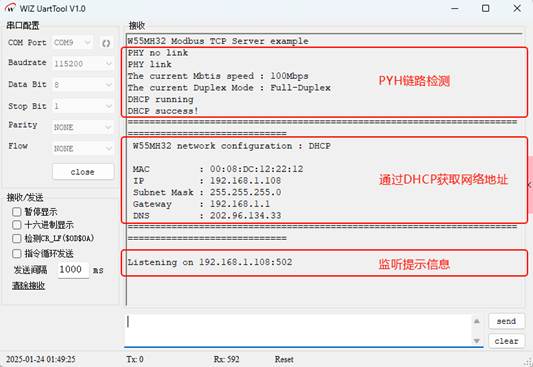
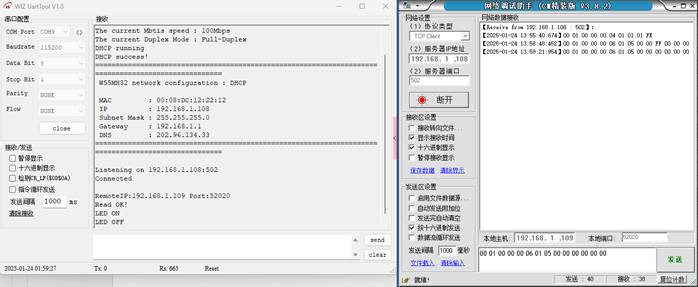
烧录例程运行后,首先可以看到进行了PHY链路检测,然后打印了设置的网络地址信息,然后开始监听地址和端口号,信息如下图所示:
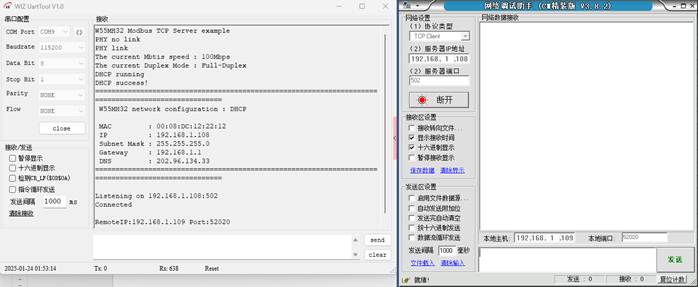
我们使用网络调试助手进行连接:
然后发送“00 01 00 00 00 06 01 01 00 00 00 01”报文后回复“0 01 00 00 00 04 01 01 01 FE”如下图所示:
接着我们发送“ 01 00 00 00 06 01 05 00 00 ff 00 00 00”令,LED就被打开了,且指令被进行了回传:
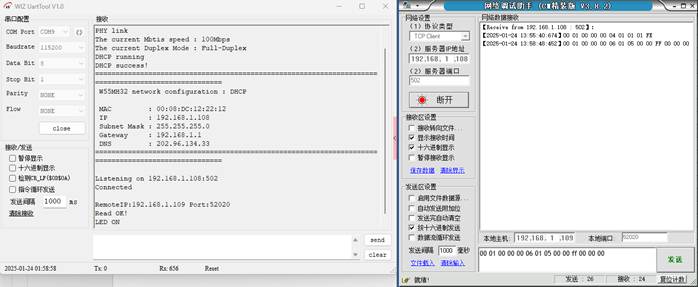
发送“0 01 00 00 00 06 01 05 00 00 00 00 00 00”可以关闭LED:
10 总结
本文讲解了如何在 W55MH32 芯片上实现 Modbus TCP 协议的服务器模式,通过实战例程展示了从初始化 LED 相关函数、主循环调用处理函数到解析处理接收到的报文的完整过程。文章详细介绍了 Modbus TCP 的概念、基本原理、优势、注意事项、应用场景、报文结构和常用功能码,帮助读者理解其在工业通信中的实际应用价值。
下一篇文章将讲解在 W55MH32 芯片上实现 HTTP_Server 与 NetBIOS 功能,解析如何通过 NetBIOS 名称访问 HTTP 服务器的网页内容,同时通过实战例程讲解具体实现步骤与要点,敬请期待!
WIZnet 是一家无晶圆厂半导体公司,成立于 1998 年。产品包括互联网处理器 iMCU™,它采用 TOE(TCP/IP 卸载引擎)技术,基于独特的专利全硬连线 TCP/IP。iMCU™ 面向各种应用中的嵌入式互联网设备。
WIZnet 在全球拥有 70 多家分销商,在香港、韩国、美国设有办事处,提供技术支持和产品营销。
香港办事处管理的区域包括:澳大利亚、印度、土耳其、亚洲(韩国和日本除外)。
审核编辑 黄宇
全部0条评论

快来发表一下你的评论吧 !
