

ABB机器人创建码垛的过程
电子说
1.4w人已加入
描述
1)什么是码垛?
有规律的移动机器人进行抓取及放置
2)如何简便码垛程序
设置好工件坐标系,工具,对第一个码垛放置点进行示教,xyz方向的间距和个数可设
3)如何创建
创建m_pallet模块
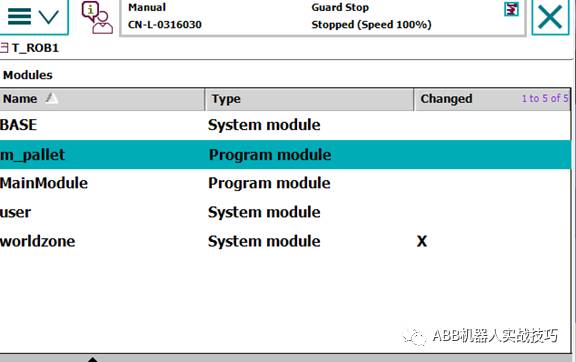
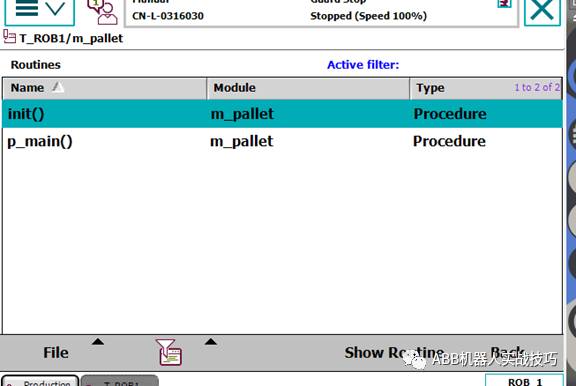
建立两个routine
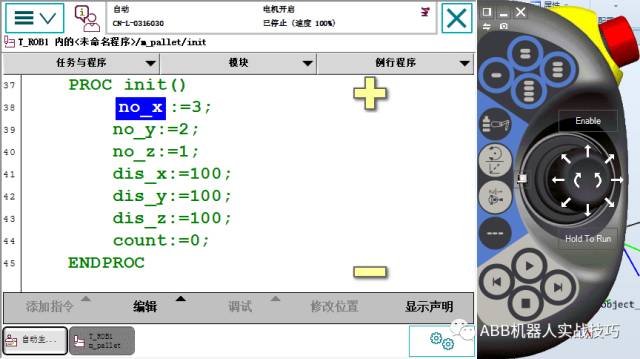
在init 程序里,设置xyz方向个数和各方向间距
在p_main程序里,创建机器人移动到pHome点,pPick位置(抓取位置),以及第一个放置点pPlace_ini
通过三层for循环,进行码垛。实例程序为先x方向,再y方向,再z方向
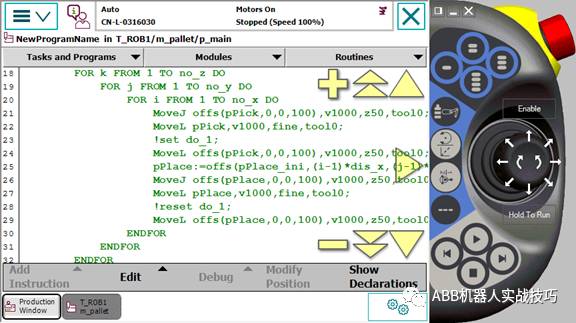
其中偏移如下:
pPlace:=offs(pPlace_ini,(i-1)*dis_x,(j-1)*dis_y,(k-1)*dis_z);
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
码垛机器人纸箱码垛优势2024-03-11 783
-
如何通过ABB机器人创建码垛程序2023-05-28 7845
-
机器人搬运码垛工作站介绍2021-07-01 2449
-
码垛机器人都有哪些特点2021-02-23 5038
-
浅谈ABB机器人指令开发过程2020-05-17 1660
-
ABB机器人指令模块介绍与开发过程2019-10-21 9274
-
码垛机器人夹抓可以实现多少种用途2018-08-15 1056
-
搬运码垛教育机器人-鸥鹏科技2016-04-01 5067
-
搬运码垛机器人2016-03-29 9244
-
码垛机器人的优点详细介绍2016-01-20 6842
-
ABB机器人的优势-纸箱码垛2015-12-23 884
-
ABB IRB5400-喷涂工业机器人2015-01-14 9425
全部0条评论

快来发表一下你的评论吧 !
