

ATV 全地形车上的速度传感器
描述
全地形车(All-Terrain Vehicle,简称 ATV),也称为“四轮摩托车”或“沙滩车”,是一种设计用于在多种复杂地形上行驶的轻型越野车辆。
通常为开放式车架、无顶棚,配备宽大的低压轮胎(增强抓地力)、手把式转向系统,部分车型带挡风玻璃或简易座椅。
SNDH轮速传感器:用于提供速度和方向信息。
速度信息通过数字方波输出提供:方向则通过正交输出来确定,其中信号之间相位相差90°。利用正交输出,目标方向可通过输出的超前/滞后相位偏移来确定。双差分霍尔效应传感器IC技术可增强性能检测小目标特征宽广的工作温度范围、强大的电气抗干扰能力和增强的环境密封能力允许在应用中灵活使用。在物料搬运、农业和建筑机械中检测车轮转速。

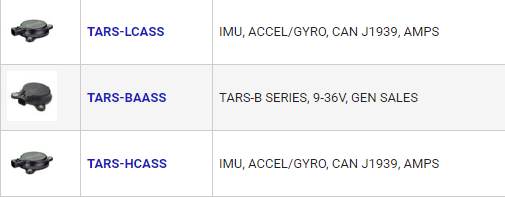
交通运输姿态基准系统 (TARS-IMU) 是一种封装传感器阵列,用于在重型、越野交通运输等行业的苛刻应用中报告车辆角速率、加速度和倾斜度。 TARS-IMU 通过报告自动化和监控车辆系统和组件的运动所需的关键数据,实现自主车辆表征并提高效率和生产率。 传感器融合算法可以通过车载固件为特定的车辆应用定制,允许针对外来环境和车辆运动过滤运动数据。
特性
- 小外形尺寸:
- 功耗更低
- 工作温度为 -40°C 至 +85°C(-40°F 至 +185°F)
- 支持 5 V 和 9 V 至 36 V 车载电源系统
- 对原始传感器数据进行高级过滤,可最大限度减少不必要的噪音和振动,从而提高定位精度
- 坚固耐用的 PBT 热塑外壳设计,适用于最苛刻的应用和环境(通过 IP67 和 IP69K 认证)
- 高性能 IMU 报告车辆角速度、加速度和倾斜度(6 自由度)
应用
- 设备控制
- 链跟踪
- 操作员辅助控制
- 工作监控
- 铲斗控制
- 车辆稳定性控制
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
汽车上传感器的种类和作用2024-01-16 2387
-
自卸车上的倾角传感器推荐2022-07-27 3161
-
压力传感器在汽车上使用很广泛2022-03-25 1578
-
湿敏电阻式传感器在汽车上的应用2021-02-10 4923
-
智能小车上的速度码盘和加速度传感器可以得到小车的运动轨迹吗2020-05-20 2790
-
速度传感器在列车行业上有什么应用2020-05-19 2476
-
汽车上的几种重要传感器2020-05-04 2241
-
光电式速度传感器的工作原理是什么?2019-09-16 2362
-
水银式减速度传感器的识别2018-10-29 1879
-
速度传感器种类及型号2018-02-05 25575
-
汽车上的传感器大集结2017-11-16 4470
-
速度传感器型号2017-11-02 4397
-
现代汽车上的传感器2009-06-23 984
全部0条评论

快来发表一下你的评论吧 !
