

航模舵机工作原理_航模舵机的装配及测试
电子说
描述
本文主要详解航模舵机,首先介绍了航模舵机工作原理,其次介绍了航模舵机的装配及测试,最后阐述了影响影响航模舵机性能的因素分析,具体的跟随小编来详细的了解一下。
一、航模舵机工作原理
航模舵机主要由位置检测器、控制电路板、空心杯电机(DC Coreless Motor)、减速齿轮组与舵盘所组成。其组成原理椎图如图1所示。
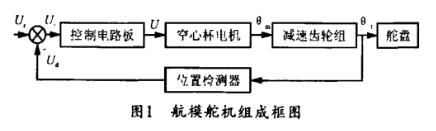
控制电路板是航模舵机的心脏,它负责接收和发出信号,控制整个舵机的运作。空心杯电机(空心杯电枢直流永磁伺服电动机)由细铜线绕成极薄的中空圆柱体,以形成重量极轻的无铁芯中空转子,然后将永磁体置于圆柱体内。其重量、体积比普通铁芯电机少1/3-1/2。航模舵机齿轮可以是塑胶齿轮或金属齿轮,其中金属齿轮不会因负载过大而崩齿。位置检测器通常采用同轴电位器。舵盘一般安装于航模舵机的输出轴上,是联接航模舵机与模型飞机连杆的部件,可将动力从航模舵机输出轴传给飞机模型。
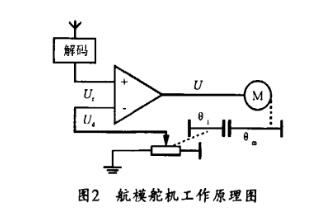
航模舵机的工作原理如图2所示。图中,当接收机天线收到PWM控制信号后,经接收通道进人信号解码电路解调,可获得一个直流偏置电压U,,同时,与舵机的输出轴相连的位置反馈电位器也将另一个位置电压U反馈到控制电路。控制电路将U,与Uj进行比较,再将得到的电庆差送人电机驱动电路来驱动空心杯电机转动,直到电压差趋于零, 空心杯电机停止转动。此时位置偏差趋于零,舵盘达到预期位置。
二、航模舵机的装配
航模舵机的装配步骤是先将电机齿轮装到电机轴上,并确保电机齿轮与电机上端面留有少许间隙,再将电机和电位器装人中壳,同时将电路板置于中壳上,使电位器与电机的焊脚插入电路板对应的孔内,并将其焊接于电路板上,然后再按照顺序装人齿轮,图3所示是其安装图。装好后,再打上齿轮油,并注意各齿间啮合良好,轴要垂直中壳,齿轮油要均匀。最后将上壳置于中壳上并压紧,然后调整好三条导线位置,并加上底壳,打好螺钉。
三、航模舵机的测试
航模舵机的测试项目包括角度(%)、 扭力(N.m)、噪音(dBA)、速度(s/60%)、 外形尺寸(mm)、测试电压(V)和重最(kg) 等。其中速度的单位是sec/60^,表示航模舵机位置检测器转动609所需要的时间。
1、角度测试
航模舵机控制信号是周期为20 ms的脉宽调制(PWM)信号,输人信号脉冲宽度为0.5~2.5ms, 相对应的舵盘位置为0*~180*,吴线性变化。图4所示是舵机输出角与输人信号脉冲宽度的关系。由于航模舵机具有对应性和保持性,故当给其提供一定的脉宽时,其输出轴就会保持在一个相应的角度,上。
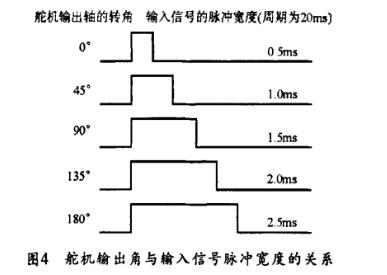
最大输出角度为输入0.5~2.5 ms脉冲时航模舵机转过的角度(大约为180)。当脉宽为0.5 ms时, 指针对准起始值零刻度。当航模舵机输入1.5ms的脉冲时,输出角为90*。
2、扭力测试
扭力测试是在特定电源电压下,采用专用扭力测试夹具,用伺服控制器控制航模舵机,即在不打滑、不崩牙的情况下,测试其所能承受的最大扭力。
3、噪音测试
在环境噪音小于35 dBA的情况下,在特定电源电压下,将航模舵机接好电源线,放人噪音箱内并与噪音箱内的噪音计相距100 mm。再用伺服控制器控制航模舵机,记录测试数据峰值。
4、速度测试
将航模舵机周定于速度测试仪上,并将测试仪放人暗箱中,冉把带有指针的舵盘固定于其输出轴上,然后在特定电源电压下,用伺服控制器控制航模舵机,使指针从转角的一个极限位转向另一个极限位,观测测试仪显示屏显示的转速,并记录最大值。
四、影响航模舵机性能的因素分析
从航模舵机的组成看,影响其特性的主要因素是控制电路板、位置检测器、空心杯电机和齿轮组的装配,它们的匹配对其整体性能有决定性的影响。
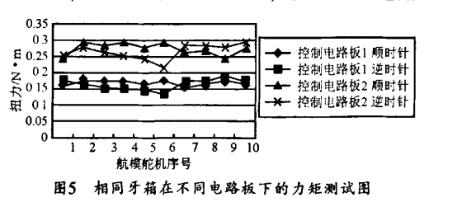
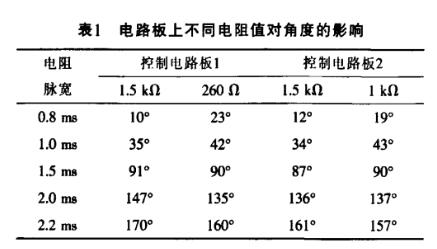
控制电路板是整个航模舵机的关键部分,对其特性的影响较明显。航模舵机性能要保证在额定负载下,控制环路应有较小超调(稳态误差小于5%)。图5所示是10个不同航模舵机在相同条件下,分别配用两种不同型号电路板的力矩测试结果。由图5可知,控制电路板1的力矩均小于控制电路板2的力矩,这说明电路板2的整体性能比电路板1的整体性能要好。控制电路板不仅对力矩有影响,对其他特性也有影响,表1所列是电路板上不同电阻值对角度的影响。事实上,将电路板上同一个阻值为1.5kQ的电阻分别改为不同的电阻值2600和1kQ时,所对应的角度脉宽值就会随之变化,这说明电路板的改变对航模舵机的角度有一定的影响。
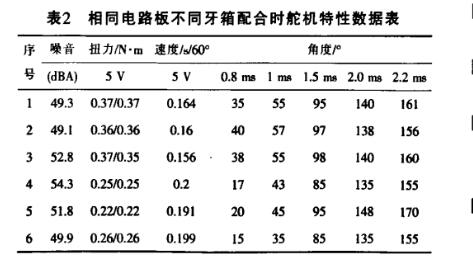
牙箱(此处的牙箱包括位置检测器、空心杯电机和齿轮组)各部件对航模舵机性能的影响也比较明显。空心杯电机对其扭力、速度、噪音都有一定的影响,空心杯电机会对电路板输人端电流产生一定的干扰, 千扰的程度取决于空心杯电机的质量。位置检测器会影响航模舵机所能达到的最大角度,航模舵机的灵敏度由位置检测器的空载扭转力矩决定, 位置检测器的寿命必然会影响到航模舵机的寿命。齿轮传动比将影响航模舵机的传出速度和扭力大小。齿轮的中心距、零件的精度、材料的选择都对其寿命、噪音有很大影响。位置检测器、空心杯电机和齿轮组组装后的相互作用对航模舵机的特性也有影响。表2所列是同一电路板配同型号但不同牙箱的各项指标测试结果,其中舵机1、2、3为一厂家同型号的三款不同牙箱,舵机4、5、6为另一厂家同型号的三款不同牙箱,该六款牙箱均配用同一块控制电路板,数据表明,同一厂家的牙箱性能差距不大。而不同厂家的牙箱对舵机性能的影响较为明显。说明相同型号的部件组合后,舵机的综合性能稍有差异,而不同型号的部件组合后,舵机的综合特性差异很大。
装配时作业方式的差异直接导致航模舵机特性的不同。如装配时齿轮未完全啮合,或轴被装歪,扭力就可能达不到要求,容易打齿,且会出现较大噪音。如果未打牙油或者底盖没安装到位,也会出现噪音大、寿命短的问题。
对航模舵机进行综合测试、全面评价各项性能指标,是保证其质量的重要环节。如测试不按测试标准执行而违规操作,那么,当该部件被安装于成品机上时,就很可能直接导致其性能下降甚至变为废品。
电压也会直接影响航模舵机的性能。一般在5.0 V电源电压下的扭力要小于6.0 V电源电压下的扭力,而在5.0 V电源电压下的速度却大于6.0V电源电压下的速度。事实上, 速度快、扭力大的舵机,除了需要较高的电源电压外,还必须搭配高质量的空心杯电机、齿轮组、控制电路板和反应灵敏的位置检测控制器,同时要配有高品质、高容量的电源电池。
五、结束语
控制电路板、位置检测器、空心杯电机和齿轮组的性能是影响航模舵机整体性能的主要因素。要得到性能良好的舵机,除了确保各零部件合理的设计和优良的特性以外,还要严格控制装配工艺,确保各部件的匹配,这样才能保证舵机性能的正常稳定。
-
舵机是用来干什么的 舵机的组成及工作原理2023-07-20 25459
-
舵机的工作原理是什么2022-01-20 1335
-
舵机控制1.12021-11-15 902
-
舵机构成工作原理2021-09-13 2123
-
舵机工作原理2021-08-04 1736
-
什么是舵机?其工作原理是什么2021-07-13 1775
-
舵机工作原理及程序相关资料分享2021-06-30 1335
-
stm32f103vet6-PWM驱动SG90舵机介绍2021-06-29 1394
-
dfrobot齿轮舵机介绍2019-12-11 3858
-
舵机控制原理是什么_舵机的控制方法2018-05-30 147884
-
舵机工作原理12016-02-23 871
-
航模舵机控制原理详解2015-11-11 3306
全部0条评论

快来发表一下你的评论吧 !
