

国产!全志T113-i 双核Cortex-A7@1.2GHz 工业开发板—Linux-RT应用开发案例
电子说
描述
前 言
本文适用开发环境如下:
Windows开发环境:Windows 7 64bit、Windows 10 64bit
虚拟机:VMware15.5.5
Linux开发环境:Ubuntu18.04.4 64bit
LinuxSDK:T113_Tina5.0-V1.0(Linux)
Kernel:Linux-RT-5.4.61
我司提供的Linux-RT内核应用了开源的RT PREEMPT机制进行补丁。PREEMPT_RT补丁的关键是最小化不可抢占的内核代码量,同时最小化必须更改的代码量,以便提供这种附加的可抢占性。PREEMPT_RT补丁利用Linux内核的SMP功能来添加这种额外的抢占性,而不需要完整的内核重写。Linux-RT内核增加PREEMPT_RT补丁后,增加了系统响应的确定性和实时性,但是代价是CPU性能降低。
Linux-RT内核与普通Linux内核相比,几个主要的相同之处是:
具有相同的开发生态系统,包括相同工具链、文件系统和安装方法,以及相同的POSIX API等。
仍然存在内核空间和用户空间的划分。
Linux应用程序在用户空间中运行。
Linux-RT内核与普通Linux内核在常规编程方式上的几个主要不同之处是:
调度策略。
优先级和内存控制。
基于Linux-RT内核的应用程序使用了调度策略后,系统将根据调度策略对其进行调优。
Linux系统实时性测试
本章节主要介绍使用Cyclictest延迟检测工具测试Linux系统实时性的方法。Cyclictest是rt-tests测试套件下的一个测试工具,也是rt-tests下使用最广泛的测试工具,一般主要用来测试内核的延迟,从而判断内核的实时性。
我司默认使用是的Linux内核,同时提供了Linux-RT内核位于产品资料“4-软件资料LinuxKernelimagelinux-5.4-[版本号]-[Git系列号]nand”目录下,请按照如下方法替换为Linux-RT内核。
将Linux-RT内核镜像boot-rt.fex和Linux-RT内核配套的内核模块目录modules-rt拷贝至Ubuntu工作目录下,执行如下命令,进入modules-rt目录下将Linux-RT内核模块压缩包解压。
Host# cd modules-rt/
Host# tar -zxf 5.4.61-rt37-gb1bd4aa.tar.gz
 图 1
图 1
将内核镜像和解压后的内核模块拷贝至评估板文件系统任意目录下。执行如下命令,分别替换内核镜像和内核模块至Linux系统启动卡,评估板重启生效。
备注:若使用eMMC配置评估板,请使用emmc目录下的Linux-RT内核镜像和Linux-RT内核模块,并修改Linux系统启动卡对应设备节点为"/dev/mmcblk1p4"。
Target# dd if=boot-rt.fex of=/dev/mmcblk0p4
Target# rm /lib/modules/* -rf
Target# cp 5.4.61-rt37-gb1bd4aa/ /lib/modules/ -r
Target# sync
Target# reboot
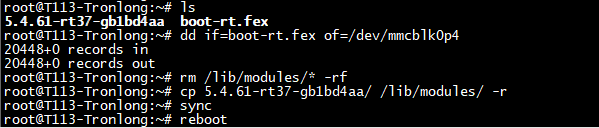 图 2
图 2
 图 3 Linux-RT内核
图 3 Linux-RT内核
Cyclictest工具简介
Cyclictest常用于实时系统的基准测试,是评估实时系统相对性能的最常用工具之一。Cyclictest反复测量并精确统计线程的实际唤醒时间,以提供有关系统的延迟信息。它可测量由硬件、固件和操作系统引起的实时系统的延迟。
为了测量延迟,Cyclictest运行一个非实时主线程(调度类SCHED_OTHER),该线程以定义的实时优先级(调度类SCHED_FIFO)启动定义数量的测量线程。测量线程周期性地被一个到期的计时器(循环报警)所定义的间隔唤醒,随后计算有效唤醒时间,并通过共享内存将其传递给主线程。主线程统计延迟值并打印最小、最大和平均延迟时间。
参考链接:https://wiki.linuxfoundation.org/realtime/documentation/howto/tools/cyclictest/start?s[]=cyclictest。
使用Cyclictest测试系统实时性
本次测试对比基于Linux-RT-5.4.61内核和Linux-5.4.61内核的Linux系统实时性。参照如下步骤,结合Iperf和Cyclictest工具测试系统的实时性。此处使用Iperf工具不断触发系统中断,提高中断处理负载,以便更好测试系统实时特性。
在Ubuntu执行如下命令查看IP地址,并以服务器模式启动Iperf测试。
Host# ifconfig
Host# iperf -s
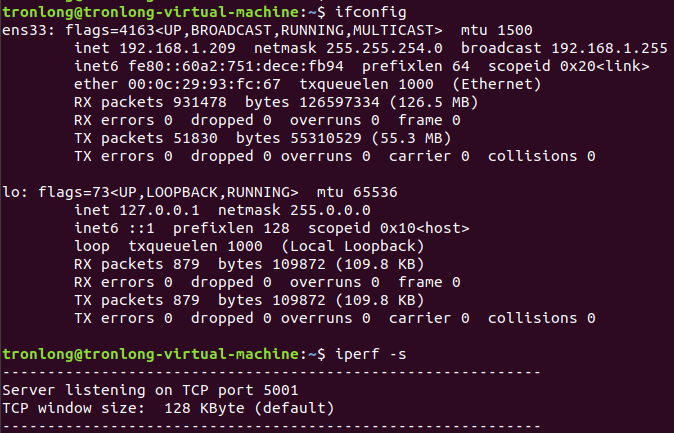 图 4
图 4
分别使用Linux-RT-5.4.61内核和Linux-5.4.61内核启动评估板,执行如下命令以客户端模式启动Iperf,并连接至服务器端(Ubuntu系统)。"192.168.1.209"为Ubuntu的IP地址,"-t3600"指定测试时间为3600秒,"&"表示让程序在后台运行。
Target# iperf -c 192.168.1.209 -d -t3600 > /dev/null 2>&1 &
 图 5
图 5
执行如下命令使用Cyclictest程序测试系统实时性。
Target# cyclictest -t5 -p98 -m -n -D10m

 图 7 Linux-5.4.61内核测试结果
图 7 Linux-5.4.61内核测试结果
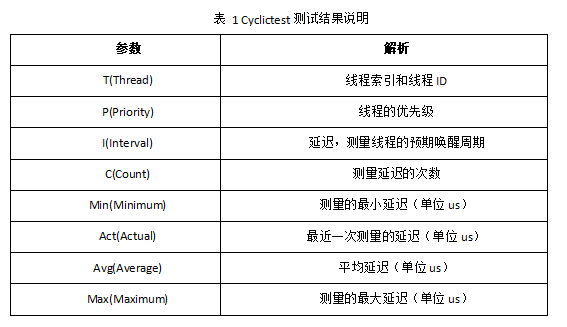 表 1 Cyclictest测试结果说明
表 1 Cyclictest测试结果说明
对比测试数据,可看到基于Linux-RT-5.4.61内核的系统的延迟更加稳定,平均延迟、最大延迟更低,系统实时性更佳。
Cyclictest命令参数解析可执行"cyclictest --help"查看,如下图所示。
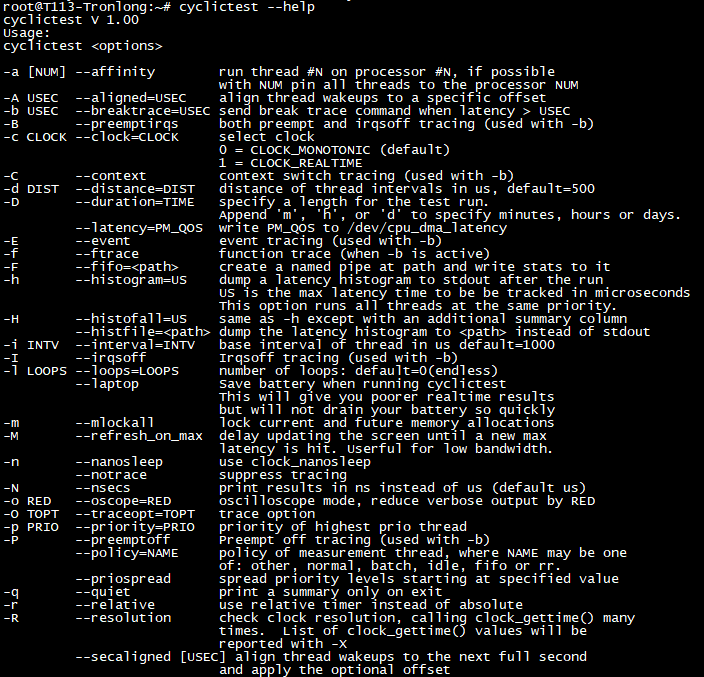 图 8
图 8
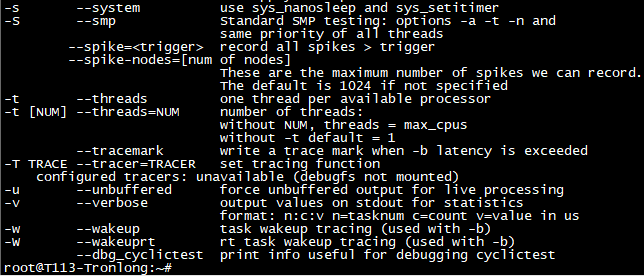 图 9
图 9
Linux-RT性能测试
本次测试分别在CPU空载、满负荷(运行stress压力测试工具)、隔离CPU核心的情况下,对比评估Linux-RT内核的系统实时性。
CPU空载状态
评估板上电启动,进入评估板文件系统执行如下命令,修改内核printk日志等级,避免内核打印信息影响实时测试。
Target# echo 1 > /proc/sys/kernel/printk
调整内存分配策略为“2”,禁用内存过度使用。避免出现OOM(Out-of-Memory) Killer攻击某些进程而产生延迟,影响测试结果。
Target# echo 2 > /proc/sys/vm/overcommit_memory
 图 10
图 10
执行如下命令,基于CPU空载状况下测试系统的实时性。测试指令需运行12小时,请保持评估板长时间稳定工作,测试完成后将生成统计结果output文件。
Target# cyclictest -m -n -Sp99 -i1000 -h800 -D12h -q > output
 图 11
图 11
参数解析:
-m:锁定当前和将来的内存分配;
-n:使用clock_nanosleep;
-S:采用标准SMP测试;
-p:设置线程优先级;
-i:设置线程的基本间隔;
-h:运行后将延迟直方图转储至标准输出,亦可指定要跟踪的最大延时时间(以微秒为单位);
-D:指定测试运行时长,附加m(分钟)、h(小时)、d(天)指定;
-q:运行时不打印相关信息;
CPU满负荷状态
评估板上电启动,进入评估板文件系统执行如下命令,修改内核printk日志等级,避免内核打印信息影响实时测试。
Target# echo 1 > /proc/sys/kernel/printk
调整内存分配策略为“2”,禁用内存过度使用。避免出现OOM(Out-of-Memory) Killer攻击某些进程而产生延迟,影响测试结果。
Target# echo 2 > /proc/sys/vm/overcommit_memory
图 12
执行如下命令,运行stress压力测试工具,使得CPU处于满负荷状态。再使用cyclictest工具测试CPU满负荷状态下的系统实时性能。测试指令需运行12小时,请保持评估板长时间稳定工作,测试完成后将生成统计结果output文件。
Target# stress --cpu 2 --io 2 --vm 2 --vm-bytes 32M --timeout 43200s &
Target# cyclictest -m -n -Sp99 -i1000 -h800 -D12h -q > output
 图 13
图 13
参数解析:
--cpu:指定压力测试的进程个数;
--io:指定I/O测试的进程个数;
--vm:指定内存测试的进程个数;
--vm-bytes:指定每个内存测试进程中分配内存的大小;
--timeout:指定测试时长;
隔离CPU核心状态
本次测试以隔离CPU1核心为例,通过降低系统上所运行的其他进程对隔离CPU1产生的延迟影响,确保CPU1进程的正常运行,进而评估Linux-RT内核的系统实时性。
评估板上电启动后,在U-Boot倒计时结束之前按下空格键进入U-Boot命令行模式,执行如下命令,修改环境变量,隔离CPU1核心。
U-Boot# setenv setargs_sd setenv bootargs clk_ignore_unused initcall_debug=${initcall_debug} console=${console} loglevel=${loglevel} root=${sd_root} init=${init} partitions=${partitions} cma=${cma} snum=${snum} mac_addr=${mac} wifi_mac=${wifi_mac} bt_mac=${bt_mac} specialstr=${specialstr} gpt=1 isolcpus=1
U-Boot# setenv setargs_nand_ubi setenv bootargs ubi.mtd=${mtd_name} clk_ignore_unused initcall_debug=${initcall_debug} console=${console} loglevel=${loglevel} root=${nand_root} rootfstype=${rootfstype} init=${init} partitions=${partitions} cma=${cma} snum=${snum} mac_addr=${mac} wifi_mac=${wifi_mac} bt_mac=${bt_mac} specialstr=${specialstr} gpt=1 isolcpus=1
U-Boot# saveenv
U-Boot# reset
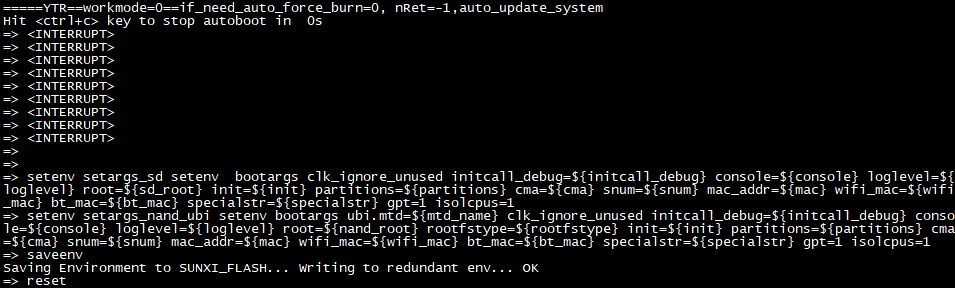 图 14
图 14
备注:若为eMMC配置评估板,请执行如下命令,修改环境变量,隔离CPU1核心。
U-Boot# setenv setargs_emmc setenv bootargs clk_ignore_unused initcall_debug=${initcall_debug} console=${console} loglevel=${loglevel} root=${emmc_root} init=${init} partitions=${partitions} cma=${cma} snum=${snum} mac_addr=${mac} wifi_mac=${wifi_mac} bt_mac=${bt_mac} specialstr=${specialstr} gpt=1 isolcpus=1
U-Boot# setenv setargs_sd setenv bootargs clk_ignore_unused initcall_debug=${initcall_debug} console=${console} loglevel=${loglevel} root=${sd_root} init=${init} partitions=${partitions} cma=${cma} snum=${snum} mac_addr=${mac} wifi_mac=${wifi_mac} bt_mac=${bt_mac} specialstr=${specialstr} gpt=1 isolcpus=1
U-Boot# saveenv
U-Boot# reset
进入评估板文件系统,执行如下命令,修改内核printk日志等级,避免内核打印信息影响实时测试。
Target# echo 1 > /proc/sys/kernel/printk
调整内存分配策略为“2”,禁用内存过度使用。避免出现OOM(Out-of-Memory) Killer攻击某些进程而产生延迟,影响测试结果。
Target# echo 2 > /proc/sys/vm/overcommit_memory
图 15
执行如下命令,运行stress压力测试工具,使得CPU处于满负荷状态。再使用taskset工具将cyclictest测试程序运行在CPU1核心,测试CPU1核心满负荷状态下的系统实时性能。测试指令需运行12小时,请保持评估板长时间稳定工作,测试完成后将生成统计结果output文件。
Target# stress --cpu 2 --io 2 --vm 2 --vm-bytes 32M --timeout 43200s &
Target# taskset -c 0,1 cyclictest -m -n -Sp99 -i1000 -h800 -D12h -q > output
 图 16
图 16
统计结果分析
我司已提供脚本文件get_histogram.sh用于绘制统计结果直方图,位于产品资料“4-软件资料Demolinux-rt-demosCyclictestbin”目录下,请将该脚本文件拷贝至Ubuntu工作目录下。
 图 17
图 17
在Ubuntu系统执行如下命令,安装gnuplot工具。
Host# sudo apt-get install gnuplot
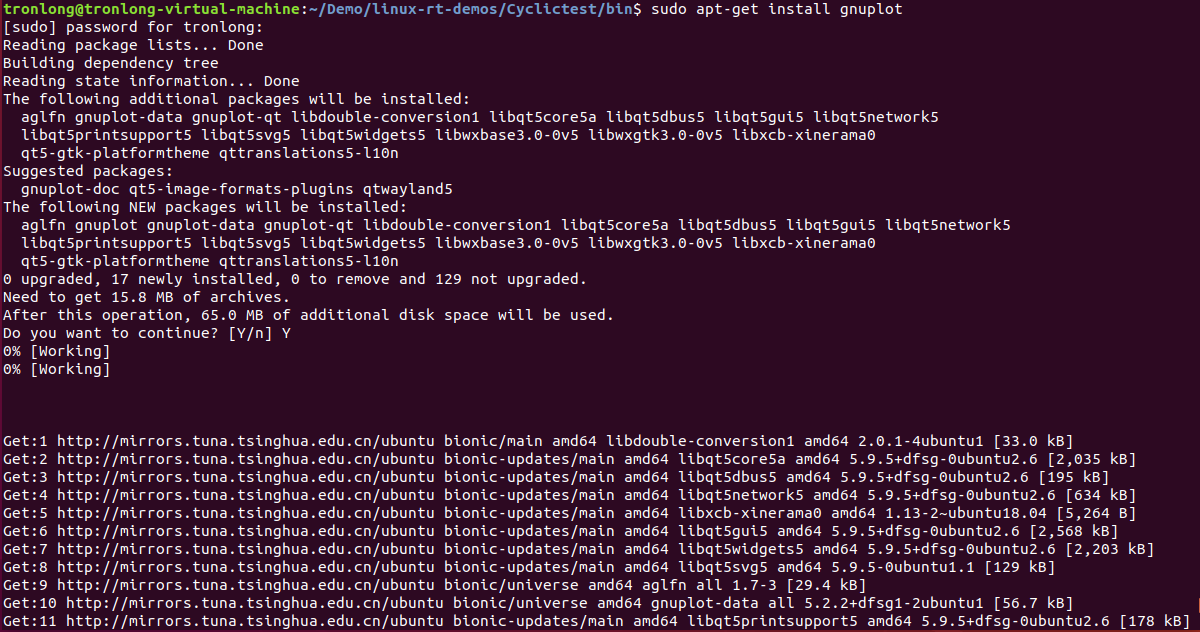 图 18
图 18
CPU空载状态
请将CPU空载状态下的统计结果output文件拷贝至Windows工作目录,使用Windows文本工具打开该文件并拖动至文件末尾,可查看Linux系统每个核心(CPU0~CPU1)的最小延迟(Min Latencies)、平均延迟(Avg Latencies)、最大延迟(Max Latencies)统计结果。
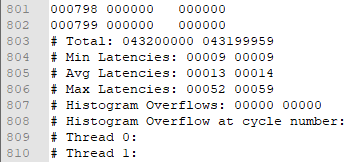 图 19
图 19
请将CPU空载状态下的统计结果output文件拷贝至Ubuntu,存放在get_histogram.sh同一目录下。执行如下命令生成直方图文件plot.png,请将其拷贝至Windows下并打开。
Host# ./get_histogram.sh
 图 20
图 20
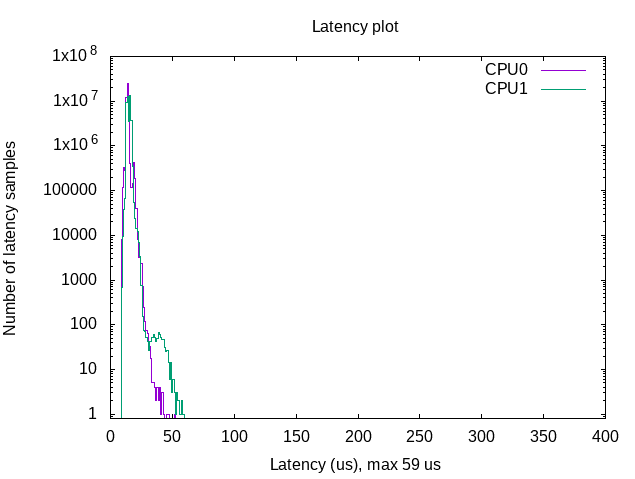 图 21
图 21
根据测试结果output文件数据以及结合直方图,可得主要数据如下表。本次测试中,CPU1核心Max Latencies值最大,为59us,CPU0核心的Max Latencies值最小,为52us。
备注:测试数据与实际测试环境有关,仅供参考。
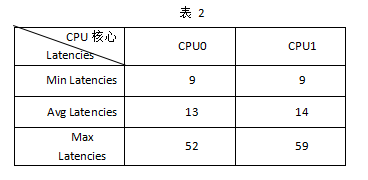 表 2
表 2
CPU满负荷状态
参考如上方法,分析CPU满负荷状态下的统计结果如下所示。本次测试中,CPU0核心Max Latencies值最大,为91us,CPU1核心的Max Latencies值最小,为75us。
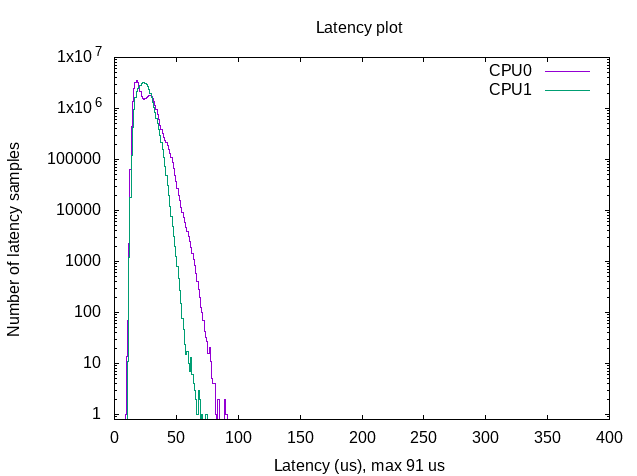 图 22
图 22
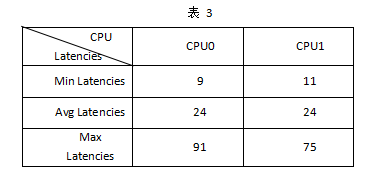 表 3
表 3
隔离CPU核心状态
参考如上方法,分析隔离CPU核心状态下的统计结果如下所示。本次测试中,CPU0核心Max Latencies值最大,为61us,隔离CPU1核心的Max Latencies值最小,为55us。
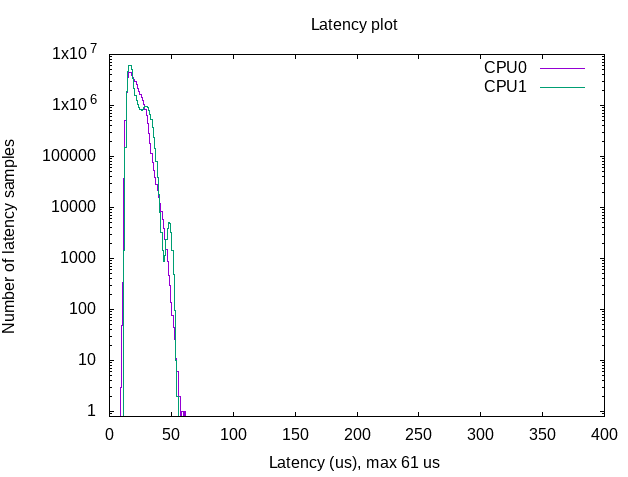 图 23
图 23
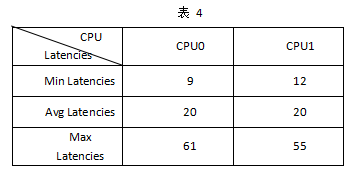 表 4
表 4
根据CPU空载、CPU满负荷、隔离CPU核心三种状态的测试结果可知:当程序指定至隔离的CPU1核心上运行时,Linux系统延迟最低,可有效提高系统实时性。故推荐对实时性要求较高的程序(功能)指定至隔离的CPU核心运行。
rt_gpio_ctrl案例
案例说明
通过创建一个基本的实时线程,在线程内触发LED的电平翻转,同时程序统计实时线程的调度延时,并通过示波器测出LED电平两次翻转的时间间隔。由于程序默认以最高优先级运行,为避免CPU资源被程序完全占用,导致系统被挂起,因此在程序中增加100us的延时。程序原理大致如下:
(1)在Linux-RT内核上创建、使用实时线程。
(2)实时线程中,计算出触发LED电平翻转的系统调度延时。
案例测试
本小节测试以隔离CPU1核心为例,通过降低系统上所运行的其他进程对隔离CPU1产生的延迟影响,确保CPU1进程的正常运行,进而评估Linux-RT内核的系统实时性。
评估板上电启动后,在U-Boot倒计时结束之前按下空格键进入U-Boot命令行模式,执行如下命令,修改环境变量,隔离CPU1核心。
U-Boot# setenv setargs_sd setenv bootargs clk_ignore_unused initcall_debug=${initcall_debug} console=${console} loglevel=${loglevel} root=${sd_root} init=${init} partitions=${partitions} cma=${cma} snum=${snum} mac_addr=${mac} wifi_mac=${wifi_mac} bt_mac=${bt_mac} specialstr=${specialstr} gpt=1 isolcpus=1
U-Boot# setenv setargs_nand_ubi setenv bootargs ubi.mtd=${mtd_name} clk_ignore_unused initcall_debug=${initcall_debug} console=${console} loglevel=${loglevel} root=${nand_root} rootfstype=${rootfstype} init=${init} partitions=${partitions} cma=${cma} snum=${snum} mac_addr=${mac} wifi_mac=${wifi_mac} bt_mac=${bt_mac} specialstr=${specialstr} gpt=1 isolcpus=1
U-Boot# saveenv
U-Boot# reset
图 24
将案例bin目录下的可执行文件拷贝至评估板文件系统,并执行如下命令运行测试程序,再按"Ctrl + C"退出测试,串口终端将打印程序统计的延迟数据,如下图所示。
Target# sysctl kernel.sched_rt_runtime_us=-1
Target# taskset -c 1 ./rt_gpio_ctrl -t 10 -d 100
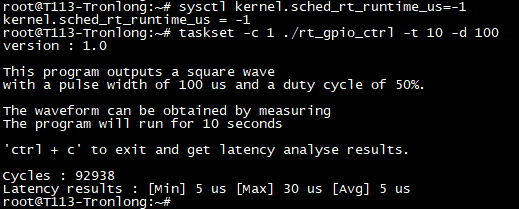 图 25
图 25
同时使用示波器捕捉LED两次电平翻转之间的间隔就对应上线程调度的延迟,测试点为R46电阻一端。
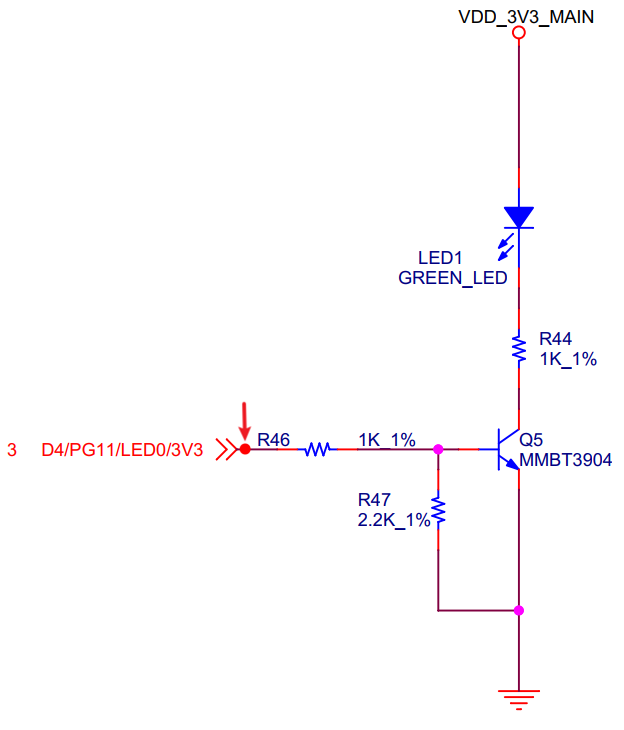 图 26
图 26
算出电平两次翻转的时间间隔为∆x = 104us,如下图所示。由于程序中增加了100us的时间延时,因此实际延时时应为:104us – 100us = 4us,与程序统计打印的Latency results平均值5us相近。
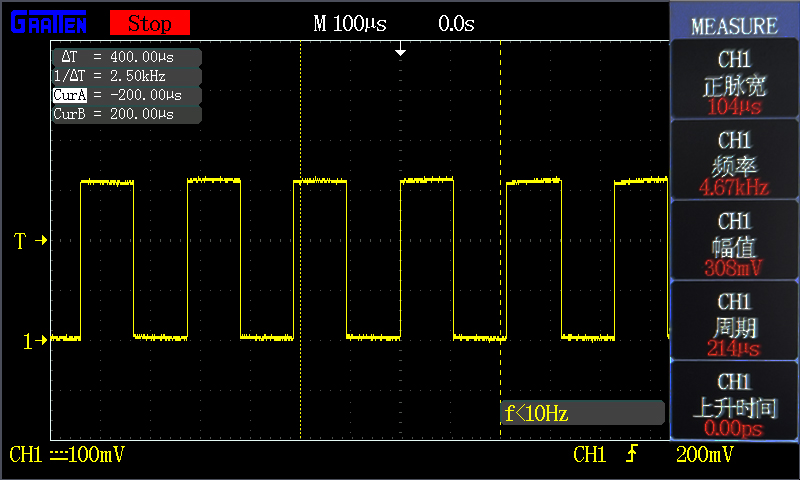 图 27
图 27
案例编译
将产品资料“4-软件资料Demolinux-rt-demosrt_gpio_ctrlsrc”案例源码拷贝至Ubuntu。进入案例源码目录,执行如下命令,编译案例生成可执行文件。
Host# CC=/home/tronlong/T113/tina5.0_v1.0/out/t113_i/tlt113-evm-nand/buildroot/buildroot/host/usr/bin/arm-linux-gnueabi-gcc CXX=/home/tronlong/T113/tina5.0_v1.0/out/t113_i/tlt113-evm-nand/buildroot/buildroot/host/usr/bin/arm-linux-gnueabi-g++ make
备注:若使用eMMC配置评估板,请将命令中的"tlt113-evm-nand"改为"tlt113-evm-emmc"。
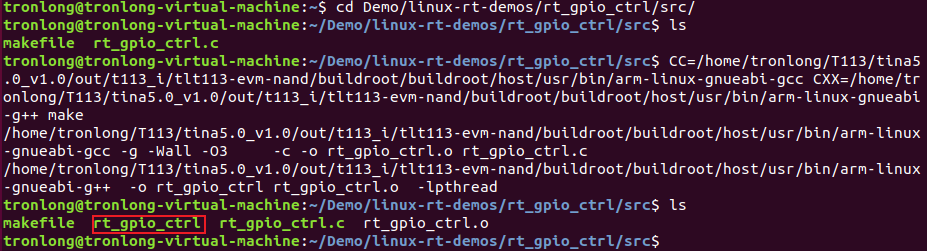 图 28
图 28
关键代码说明
(1)创建一个基于PREEMPT_RT的实时任务,具体操作包括内存锁定、线程堆栈内存设置、调度策略和优先级配置等。
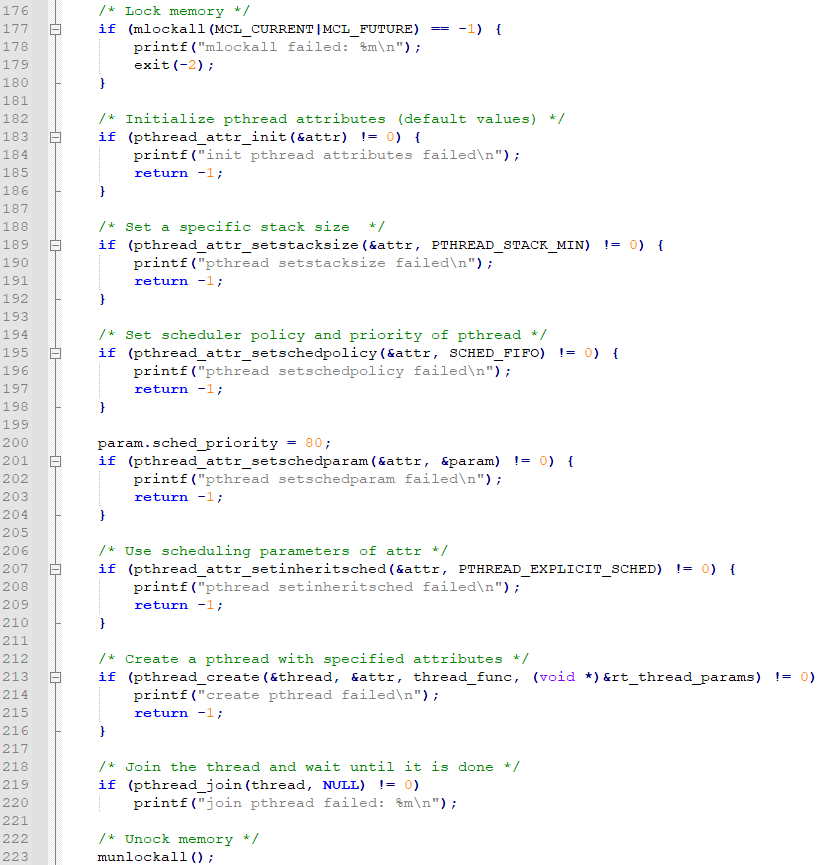 图 29
图 29
(2)在线程中打开LED文件节点,并对LED状态进行翻转。
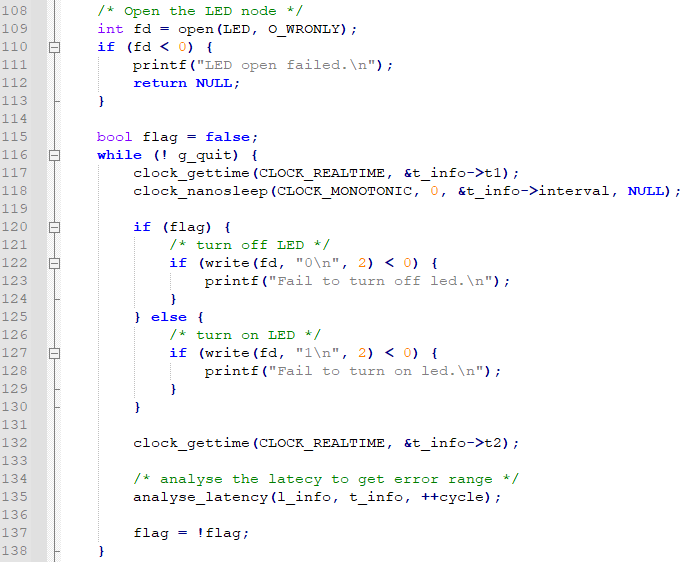 图 30
图 30
(3)统计调度时间延时情况。
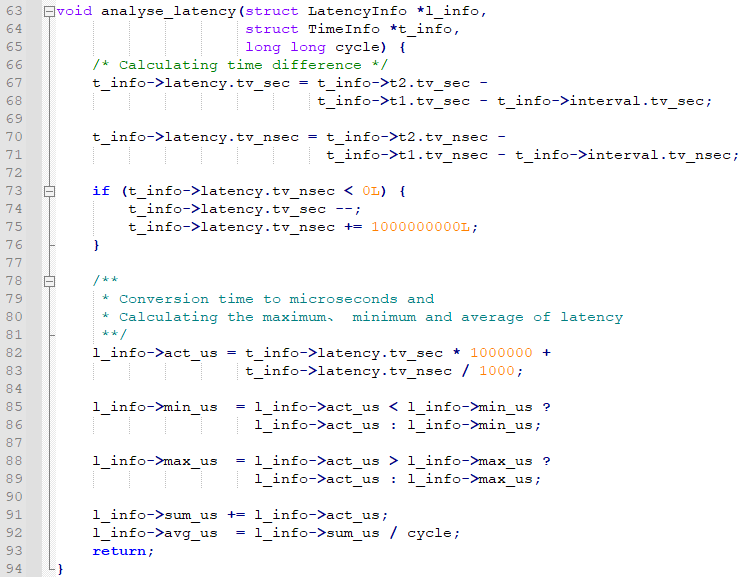 图 31
图 31
审核编辑 黄宇
-
Qt应用开发--国产工业开发板T113-i的部署教程2023-11-05 4713
-
【米尔-全志T113-i开发板试用】上电+配编译器+编译+运行ruapu测试工具全流程视频2024-02-25 4365
-
【米尔-全志T113-i开发板试用】米尔-全志T113-i开发环境搭建2024-03-01 9715
-
国产RISC-V基于全志T113-i异构多核平台2024-10-10 900
-
国产RISC-V案例分享,基于全志T113-i异构多核平台!2024-10-29 1827
-
【正点原子】全志T113-i开发板资料震撼来袭!异核开发、工控设计方案!2025-03-13 2426
-
全志T113-i+玄铁HiFi4开发板(双核ARM Cortex-A7 )规格书2023-01-31 1361
-
多核异构工业开发板:创龙科技T113-i2023-10-24 3681
-
如何把LVGL移植到T113-i国产工业开发板2023-11-14 2087
-
G2D图像处理硬件调用和测试-基于米尔-全志T113-i开发板2024-04-12 3304
-
T113-i最新发布Tina5.0系统!支持3大新特性!2024-05-14 2085
-
国产!全志T113-i 双核Cortex-A7@1.2GHz 工业开发板—DSP案例开发手册2025-08-12 1191
-
国产!全志T113-i 双核Cortex-A7@1.2GHz 工业开发板—ARM + DSP、RISC-V核间通信开发案例2025-08-18 1294
-
国产!全志T113-i 双核Cortex-A7@1.2GHz 工业开发板—Linux系统使用手册(二)2025-09-02 939
-
国产!全志T113-i 双核Cortex-A7@1.2GHz 工业开发板—Linux系统使用手册(三)2025-09-04 1013
全部0条评论

快来发表一下你的评论吧 !
