

基于睿擎派轻松玩转EtherCAT主站,实现电机精确控制
描述
EtherCAT:工业控制的“神经中枢”
在现代工业自动化领域,设备实时协同成为智能制造的命脉。EtherCAT协议凭借其微秒级响应、精准时钟同步、拓扑灵活性三大核心优势,已成为高端运动控制领域的首选总线技术。本次实战教程将基于睿擎派平台,演示实现:
EtherCAT主站开发
CSP模式伺服电机精准控制
远程IO流水灯联动
开启工业实时通信开发新篇章!
EtherCAT控制电机示例
本示例通过创建一个EtherCAT Master实例,完成对EtherCAT伺服控制器和远程IO的初始化配置,使伺服电机控制器工作在CSP模式。在EtherCAT主站过程数据同步回调函数中,更新电机位置信息,实现电机运行、停止、正转、反转等操作,并循环输出电平给远程IO设备,让IO设备输出流水灯的效果。
硬件准备
睿擎工业开发平台支持板卡1块(睿擎派RC3506)
EtherCAT伺服驱动器一套(推荐力川LC10E-400W)
EtherCAT远程IO一套(可选,16DI 16DO)
串口调试器、jlink调试各一套
硬件连接
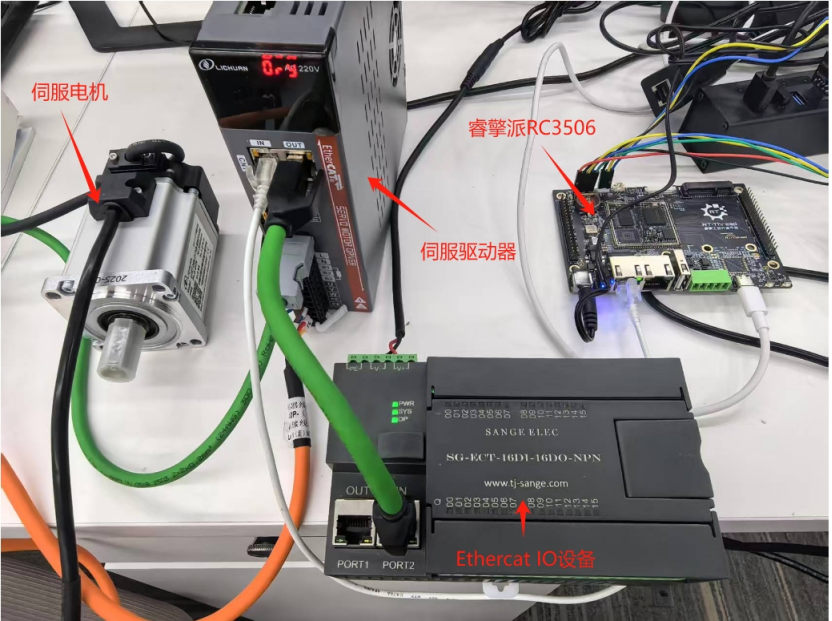
用网线将伺服控制器IN口与开发板ETH1网口连接,并将远程IO模块的IN口连接到伺服控制器的OUT口。伺服电机的电源线和编码器线分别接入电源口和CN3连接口。如图所示:
创建示例工程
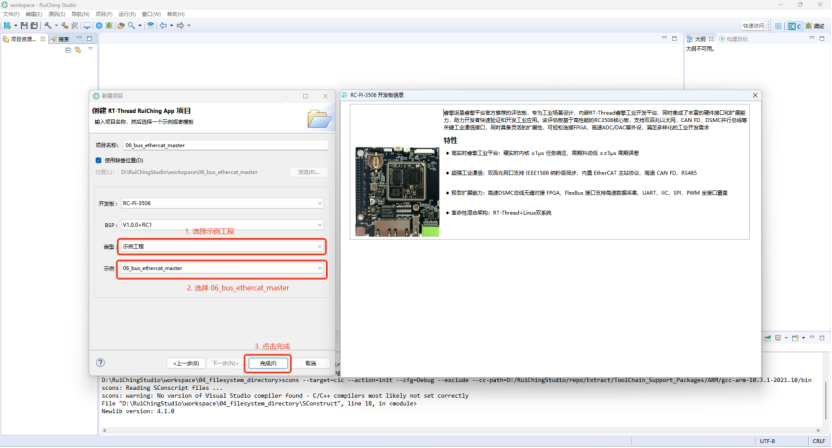
在RuiChing Studio IDE中,按以下步骤创建06_bus_ethercat_master
示例工程:
核心示例代码
工程生成的ethercat_domain.c文件中,主要核心实现代码如下:
周期设置
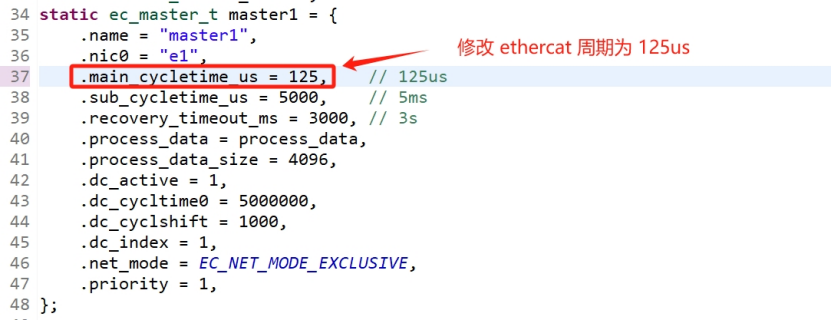
static ec_master_t master1是主站的结构体信息,默认配置1ms同步周期,如果从站支持1ms以下的同步周期,我们可以修改主站的同步周期,这里设置为125us。
EtherCAT主站的初始化配置回调
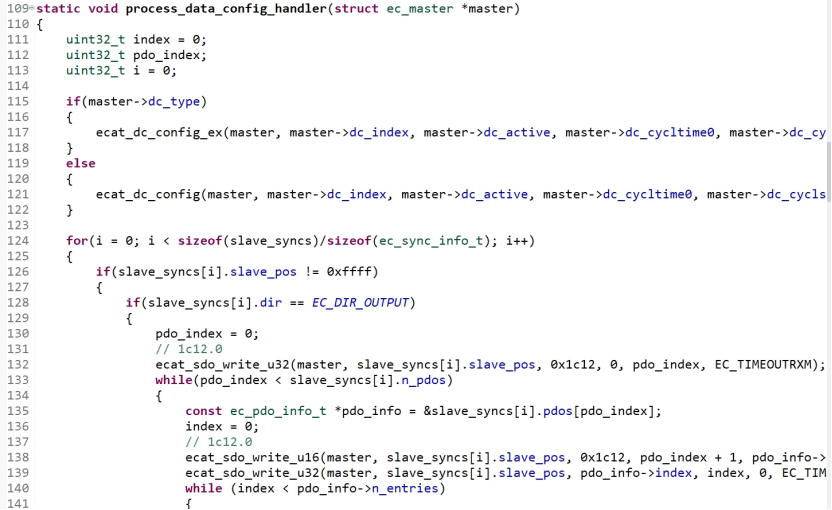
process_data_config_handler主要是EtherCAT主站的初始化配置回调,在这个函数中,通常要对DC时钟进行配置以及PDO过程数据的映射配置,在本例子主要是对伺服电机的模式,目标位置,目标速度,当前状态,当前速度,当前位置等PDO进行映射配置。
EtherCAT主站运行时周期循环过程数据更新回调
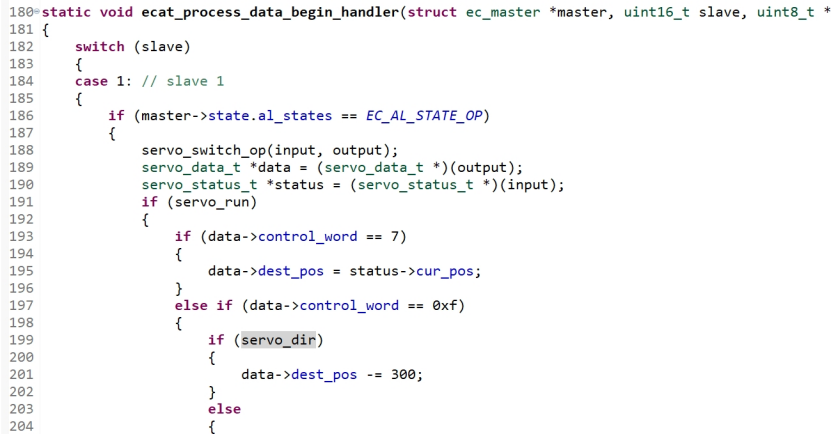
ecat_process_data_begin_handler主要是EtherCAT主站运行时周期循环过程数据更新回调,在这个函数中,主要进行电机模式状态切换处理以及对电机的位置进行增量,实现正转、反转、停止等操作。
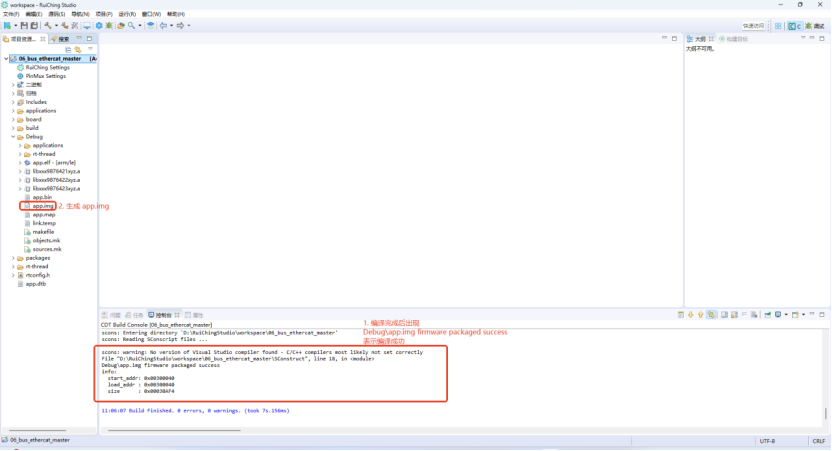
编译示例工程
对06_bus_ethercat_master工程进行编译:
运行程序
使用IDE调试并运行程序后,在终端输入motor_run运行电机,可以观察到电机旋转。EtherCAT示例运行后,远程IO模块输出端会呈现流水灯的方式控制,电机会顺时针旋转。驱动器风扇会开启,面板显示88rn字符。
在终端输入motor_stop可以停止电机。
在终端输入motor_dir 0/1可以改变电机方向(注意:在电机停止状态下设置)。

总结
从伺服电机接线到精准控制,睿擎平台让实现EtherCAT主站开发变得简单高效。06_bus_ethercat_master示例工程只是一个起点,基于此,您可以轻松扩展:
多轴同步运动控制
分布式IO系统集成
实时性要求更高的精密制造场景
为何选择睿擎平台?
MCU开发体验,MPU性能释放:在MPU上开发达到和MCU一样的开发体验。
开箱即用的工业协议栈:Modbus、CANopen、EtherCAT等主流工业协议深度集成,大幅缩短开发周期。
稳定可靠的实时内核:确保工业控制任务的实时性和确定性。
完善的开发工具链:RuiChing Studio IDE提供从编码、编译、调试到部署的一站式体验。
活跃的社区与丰富资源:遇到问题?海量教程、文档和社区开发者为你提供支持。
-
基于睿擎派轻松玩转CANopen电机控制2025-07-19 6196
-
基于睿擎派轻松玩转Modbus工业通信2025-07-23 4110
-
睿擎EtherCAT多轴控制技术:如何实现低抖动高精度运动控制 | 深度解析2025-10-15 6545
-
【睿擎派】EtherCAT总线之IO模块读写2025-12-31 6183
-
睿擎3562 EtherCAT主站实践2026-03-11 6711
-
基于全志T507-H的Igh EtherCAT主站案例分享2024-06-03 1819
-
深度解析 | 低抖动高精度EtherCAT多轴控制的实现与实践案例2025-12-09 6077
-
基于EtherCAT的主站通信控制器设计2016-09-20 3370
-
基于赛灵思FPGA的EtherCAT主站运动控制2018-07-23 7832
-
找开发EtherCat主站的设计人员2021-08-19 2493
-
EtherCAT igh主站是如何控制松下伺服(csp模式)的2021-10-08 5150
-
开源!ZYNQ IgH EtherCAT主站方案分享2021-10-29 5791
-
虹科干货 | 简单几步教您使用工业树莓派结合CODESYS配置EtherCAT主站2022-07-14 8105
-
电机控制领域如何实现CANopen设备接入EtherCAT主站控制器2024-04-03 1523
全部0条评论

快来发表一下你的评论吧 !
