

蒙特卡洛模拟方法
电子说
描述
本文来自加州大学洛杉矶分校计算机科学专业的本科生OneRaynyDay,他喜欢用清晰易懂且不失幽默的方式讲述机器学习概念,尤其是其中的数学概念。相比作者这个“数学怪胎”,小编能力有限,只能尽力去计算验证和补齐文中未介绍的概念。如果内容有误,欢迎在留言中指出。
蒙特卡洛是座赌城
目录
简介
蒙特卡洛动作值
初识蒙特卡洛
蒙特卡洛控制
Monte Carlo ES On-Policy:ϵ -Greedy Policies Off-policy:重要性抽样
Python里的On-Policy Model
在强化学习问题中,我们可以用马尔可夫决策过程(MDP)和相关算法找出最优行动值函数 q∗(s,a)和v∗(s),它通过策略迭代和值迭代找出最佳策略。
这是个好方法,可以解决强化学习中随机动态系统中的许多问题,但它还有很多限制。比如,现实世界中是否真的存在那么多明确知道状态转移概率的问题?我们可以随时随地用MDP吗?
那么,有没有一种方法既能对一些复杂度过高的计算进行近似求解,又能处理动态系统中的所有问题?
这就是我们今天要介绍的内容——蒙特卡洛方法。
简介
蒙特卡洛是摩纳哥大公国的一座知名赌城,里面遍布轮盘赌、掷骰子和老虎机等游戏,类似的,蒙特卡洛方法的建模机制也基于随机数和统计概率。
和一般动态规划算法不同,蒙特卡洛方法(MC)以一个全新的视角来看待问题。简而言之,它关注的是:我需要从环境中进行多少次采样,才能从不良策略中辨别出最优策略?
论智注:关于动态规划算法和MC的视角差异,我们可以举这两个例子:
问:1+1+1+1+1+1+1+1 =? 答:(掰手指)8。 问:在上式后再+1呢? 答:9! 问:怎么这么快? 答:因为8+1=9。 ——动态规划:记住求过的解来节省时间!
问:我有一个半径为R的圆和一把豆子,怎么计算圆周率? 答:在圆外套一个边长为2R的正方形,往里面随机扔豆子。 问:此话怎讲? 答:如果扔了N颗豆,落入圆里的豆子有n颗。N越大,n/N就越接近πR2/4R2。 ——MC:手工算完全比不过祖冲之,我好气!
为了从数学角度解释MC,这里我们先引入强化学习中的“return”(R),也就是“回报”概念,计算agent的长期预期收益(G):

有时候,当前策略的状态概率在这个episode内是非零的,它在之后连续多个episode里也是非零的,我们就要综合考虑当前回报和未来回报的重要程度。
这不难理解,强化学习的回报往往有一定滞后性。比如下围棋时,当前下的子可能目前看来没有多大用处,但它在之后的局势中可能会显示出巨大的优势或劣势,因此我们的围棋agent需要考量长期回报。这个衡量标准就是折扣因子γ:
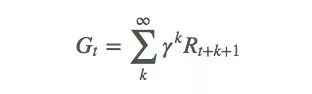
γ一般在[0,1]之间。当γ=0时,只考虑当前回报;当γ=1时,均衡看待当前回报和未来回报。
有了收益Gt和概率At,我们就能计算当前策略下,状态s的函数值V(s):
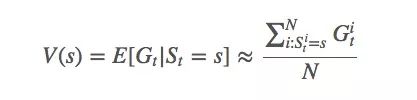
根据大数定律,当N逼近∞时,我们可以得到确切的函数期望值。我们对第i次模拟进行索引。可以发现,如果使用的是MDP(可以解决99%的强化学习问题),由于它有很强的马尔可夫性,即确信系统下个状态只与当前状态有关,与之前的信息无关:

我们可以推导出这样一个事实:t和期望值完全没有关系。所以我们可以直接用Gs来表示从某个状态开始的期望回报(将状态前移到t = 0时)。
初识蒙特卡洛
计算值函数最经典的方法是对状态s的每个first visit进行采样,然后计算平均值,也就是first-visit MC prediction。下面是找到最优V的算法:
pi = init_pi()
returns = defaultdict(list)
for i in range(NUM_ITER):
episode = generate_episode(pi) # (1)
G = np.zeros(|S|)
prev_reward = 0
for (state, reward) in reversed(episode):
reward += GAMMA * prev_reward
# backing up replaces s eventually,
# so we get first-visit reward.
G[s] = reward
prev_reward = reward
for state in STATES:
returns[state].append(state)
V = { state : np.mean(ret) for state, ret in returns.items() }
另一种方法则是every-visit MC prediction,即计算s的所有visit的平均值。虽然两者有轻微不同,但同样的,如果visit次数够大,它们最后会收敛到相似值。
蒙特卡洛动作值
如果我们有一个完整的模型,我们只需知道当前状态值,就能选择一个可以获得最高回报的动作。但如果不知道模型信息呢?蒙特卡洛的特色是无需知道完整的环境知识,只需经验就能学习。因此当我们不知道什么动作会导致什么状态,或者环境内部会存在什么互动性时,我们用的是动作值q*,而不是MDP中的状态值。
这就意味着我们估计的是qπ(s,a),而不是vπ(s),回报G[s]也应该是G[s,a]。如果原来G的空间维数是S,现在就成了S×A,这是个很大的空间,但我们还是得继续对其抽样,以找出每个状态动作元组(state−action pair)的预期回报。
正如上一节提到的,蒙特卡洛计算值函数的方法有两种:first-visit MC和every-visit MC。因为搜索空间过大,如果策略过于贪婪,我们就无法遍历每个state−action pair,做不到兼顾exploration和exploitation。关于这个问题的解决方法,我们会在下一节具体讲述。
蒙特卡洛控制
我们先来回顾一下MDP的策略迭代方式:

对于蒙特卡洛方法,它的迭代方式并没有我们想象中的不同,也是先从π开始,然后是qπ0,再是π′……

论智注:从π到q的过程代表的是一个完整的策略评估过程,而从q到π则代表一个完整的策略过程。其中策略评估过程会产生很多episode,得到很多接近真实函数的action-value函数。和vπ0一样,虽然这里我们估计出的每个动作值都是一个近似值,但通过用值函数的近似值进行迭代,经过多轮迭代后,我们还是可以收敛到最优策略。
既然qπ0和vπ0并没有那么不同,MDP可以用动态规划法求解,那么我们也可以继续套用贝尔曼最优性方程(Bellman optimality equation),即:
如果不理解,这里有一份中文介绍:增强学习(三)——MDP的动态规划解法。
下面就是exploration vs. exploitation。
Monte Carlo ES
面对这么大一个搜索空间,一个补救方法是假定我们每个episode都会从一个特定的状态开始,并采取特定的行动,也就是exploring start,然后从所有可能回报中抽样。它背后的思想是认定我们能从任意状态开始,并在每个episode之初采取所有动作,同时策略评估过程可以利用无限个episode完成。这在很多情况下是不合常理的,但在环境未知问题中却有奇效。
在实际操作中,我们只需在之前的代码块里添加如下内容:
# Before (Start at some arbitrary s_0, a_0)
episode = generate_episode(pi)
# After (Start at some specific s, a)
episode = generate_episode(pi, s, a) # loop through s, a at every iteration.
On-Policy:ϵ -Greedy策略
那么,如果我们不能假设自己能从任意的状态开始并采取任意的动作呢?不再贪婪,不再存在无限个episode,我们是否还能拟合最优策略?
这就是On-Policy的思想。所谓On-Policy,指的是评估、优化现在正在做决策的那个策略;而off-policy改进的则是和现在正在做决策的那个策略不同的策略。
因为我们要“不再贪婪”,最简单的方法就是用ε-greedy:对于任何时刻t的执行“探索”小概率ε<1,我们会有ε的概率会进行exploration,有1-ε的概率会进行exploitation。相比贪婪策略,ϵ-Greedy随机选择策略(不贪婪)的概率是ε/|A(s)|。
现在的问题是,这是否会收敛到蒙特卡洛方法的最优策略π*?——答案是会,但只是个近似值。
ϵ-Greedy收敛
让我们从q和一个ϵ-greedy策略π′(s)开始:
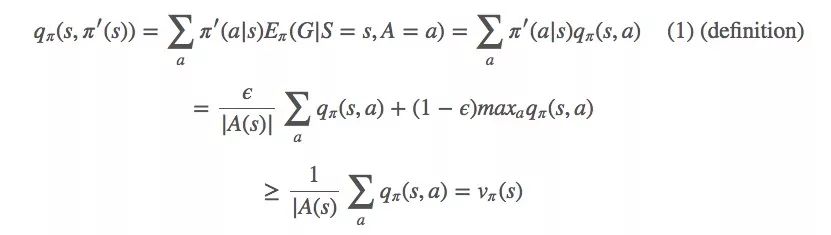
ϵ-greedy策略像贪婪策略一样对vπ做单调改进。如果回到每一步细看,就是:
(1)
这是我们的收敛目标。
这只是理论上的结果,它真的能拟合吗?显然不行,因为最优策略是固定的,而我们选择的策略是被迫随机的,所以它不能保证收敛到π*——我们来重构我们的问题:
假设我们不用概率ε在随机选择策略,而是无视规则,真正做到了完全随机选择策略,那么我们就能保证得到至少一个最优策略。即,如果(1)里的等式成立,那么我们就有π=π',因此vπ=vπ',受环境约束,这时我们获得的策略是随机情况下最优的。
Off-policy:重要性抽样
Off-policy注释
我们先来看一些定义:
π:目标策略,我们希望能优化这些策略已获得最高回报;
b:动作策略,我们正在用b生成π之后会用到的各种数据;
π(a|s)>0⟹b(a|s)>0∀a∈A:整体概念。
Off-policy策略通常涉及多个agent,其中一个agent一直在生成另一个agent试图优化的数据,我们分别称它们为行为策略和目标策略。就像神经网络比线性模型更“有趣”,同样的,Off-policy策略一般也比On-Policy策略更好玩,也更强大。当然,它也更容易出现高方差,更难收敛。
重要性采样则是统计学中估计某一分布性质时使用的一种方法。它在这里充当的角色是回答“给定Eb[G],Eπ[G]是什么”?换句话说,就是我们如何使用从b抽样得到的信息来确定π的预期回报?
直观来看,如果b选了很多a,π也选了很多a,那b在π中应该发挥着重要作用;相反地,如果b选了很多a,π并不总是跟着b选a,那b因a产生的状态不会对π因a产生的状态产生过大影响。
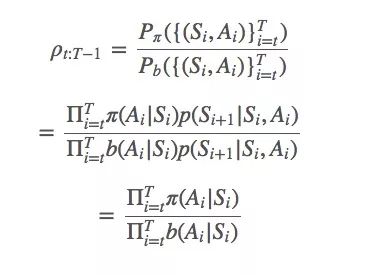
以上就是重要性采样的基础思想。给定从t到T的策略迭代轨迹(Si,Ai)Ti=t,策略π拟合这个轨迹的可能性是:

简单地说,π和b之间的比率就是:
一般重要性采样
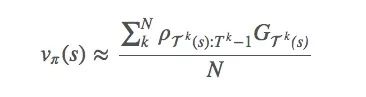
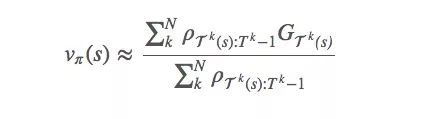
现在我们有很多方法可以用ρt:T−1计算Eπ[G]的最优解,比如一般重要性采样(ordinary importance sampling)。设我们采样了N个episode:

s的首次出现时间是:
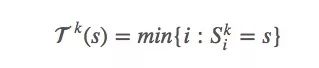
因为要估计vπ(s),所以我们可以用之前提到的first-visit方法计算均值来估计值函数。
这里用first-visit只是为了简便,我们也可以把它扩展到every-visit。事实上,我们应该结合不同方法来衡量每个episode的回报,因为如果π能拟合最优策略的轨迹,我们应该给它更多权重。
这种重要性抽样方法是一种无偏差估计,它可能存在严重的方差问题。想想那个重要性比率,如果在第k轮的某个episode之中,ρT(s):Tk−1=1000,这就太大了,但它完全有可能存在。那这个1000会造成多大影响?如果我们只有一个episode,它的影响可想而知,但因为强化学习任务往往很长,再加上里面有很多乘法计算,这个比例会存在爆炸和消失两种结果。
加权重要性采样
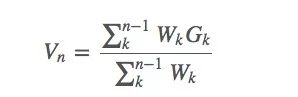
为了降低方差,一种可行的方法是加入权重来计算总和:
这被称为加权重要性采样(weighted importance sampling)。它是一个有偏差的估计(偏差趋于0),但与此同时方差降低了。如果是实践,强烈建议加权!
增量式实现
蒙特卡洛预测方法也可以采用增量式的实现方式,假设我们使用上节中的加权重要性采样,那么我们可以得到如下形式的一些抽样算法:
其中Wk是我们的权重。
假设我们有了估计值Vn和当前获得的回报Gn,要利用Vn与Gn来估计 Vn+1,同时,我们用∑nkWk表示前几轮回报的权重之和Cn。那么这个等式就是:
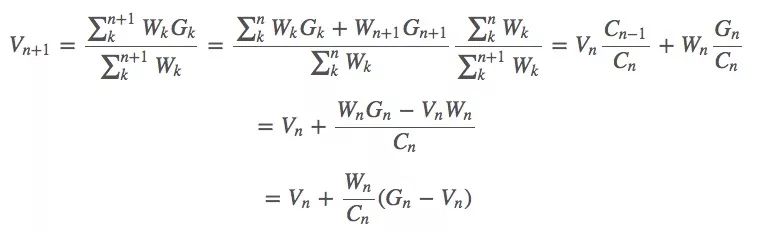
权重:Cn+1=Cn+Wn+1
现在,这个Vn就是我们的值函数,同样的方法也适用于求动作值函数Qn。
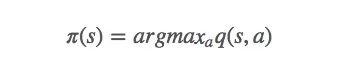
在我们更新价函数的同时,我们也可以更新我们的策略π—— argmaxaQπ(s,a)。
注:这里涉及很多数学知识,但已经很基础了,确切地说,最前沿的也和这个非常接近。
下面还有针对折扣因子、奖励的抽样简介,具体请看原文,小编动不了了。
Python里的On-Policy Model
由于蒙特卡洛方法的代码通常具有相似的结构,作者已经在python中创建了一个可以直接使用的蒙特卡洛模型类,感兴趣的读者可以在Github上找到代码。
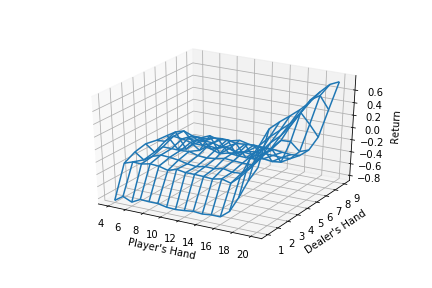
他还在原文中做了示例:用ϵ -greedy policy解决Blackjack问题。
总而言之,蒙特卡洛方法利用episode的采样学习最佳值函数和最佳策略,它无需建立对环境的充分认知,在不符合马尔可夫性时性能稳定,是一种值得尝试的好方法,也是新人接触强化学习的一块良好基石。
本文参考阅读:
[1]增强学习(二)——马尔可夫决策过程MDP:https://www.cnblogs.com/jinxulin/p/3517377.html
[2]增强学习(四)——蒙特卡罗方法(Monte Carlo Methods):http://www.cnblogs.com/jinxulin/p/3560737.html
[3]算法-动态规划 Dynamic Programming--从菜鸟到老鸟:https://blog.csdn.net/u013309870/article/details/75193592
[4]蒙特卡罗用于计算圆周率pi:http://gohom.win/2015/10/05/mc-forPI/
[5]蒙特卡洛方法 (Monte Carlo Method):https://blog.csdn.net/coffee_cream/article/details/66972281
-
蒙特卡洛法求解估计值YS YYDS 2022-10-28
-
MATLAB蒙特卡洛算法汇集篇2013-03-30 11796
-
模拟电路故障:用PSPICE做电路故障蒙特卡洛分析遇到问题2014-07-29 5007
-
求助关于multisim中蒙特卡洛分析不能添加输出节点的问题2019-03-05 3571
-
蒙特卡洛分析方法示例2019-07-12 4127
-
做蒙特卡洛分析时出现错误是什么原因导致的?2021-06-25 3826
-
求助!!!!蒙特卡洛仿真时出现错误如何解决???2023-11-17 1498
-
热辐射传输中的蒙特卡洛方法2009-07-06 919
-
基于蒙特卡洛方法的碰撞预警系统仿真2009-12-16 861
-
蒙特卡洛模拟方法与应用2017-12-12 1006
-
蒙特卡洛模拟优缺点2017-12-15 56079
-
蒙特卡洛电压暂降评估方法2018-02-11 834
-
PSpice仿真教程之蒙特卡洛分析2022-11-10 19249
全部0条评论

快来发表一下你的评论吧 !
