

用于GPS接收机的天线阵列抗干扰射频前端
电子说
描述
摘要:卫星导航定位系统的抗干扰技术研究意义重大。基于天线阵列的抗干扰技术需要同时采集多路GPS天线信号,而通用GPS接收机大多只能接收单路天线信号,难以满足需求。为此,设计了一种四元天线阵列的GPS抗干扰射频前端。通过四元天线阵列分别接收四路GPS信号,经过低噪声放大器、射频滤波器、下变频到中频信号,以供给后级A/D采样,经抗干扰模块后达到抗干扰目的。最后,对此射频前端进行整体电路测试,并给出了测试结果。经实际应用,验证了该系统方案的可行性。
0 引言
全球定位系统(Global Position System,GPS)卫星发射的信号功率小,到达地面信号微弱,再加上无法预料的恶劣环境以及专用GPS干扰机[1]的出现,这些都会直接导致GPS信号受到干扰,严重时甚至无法正常工作[1-2]。因此,为了使GPS接收机能够应付更加复杂的环境,提高其自身的抗干扰能力,开展GPS抗干扰技术的研究得到了广泛的关注[3]。
目前针对GPS抗干扰技术的研究主要包括自适应天线阵列[4]、天线增强、前端滤波技术[5]、码环跟踪[6]以及空时自适应信号处理等技术。自适应天线阵列技术能够抑制多种干扰,是该领域的主要研究模型[7]。该模型要求同时接收多路卫星信号。现有GPS接收机射频前端主要接收一路或两路信号[8-9],不能满足要求。因此,本文设计了四元天线阵列GPS抗干扰射频前端。方案采用了低噪声、滤波、混频、锁相环、自动增益控制等技术模块。与文献[10] GPS射频前端相比,本设计输出中频较低,相差达40 MHz,能够降低损耗,提高信号稳定度,便于后续处理。
1 总体设计
GPS接收系统包括卫星天线、射频前端、基带信号处理三个部分。在超外差接收机中,射频前端的功能是对GPS信号进行信号调理,下变频到中频段,为后续A/D采样提供信号。
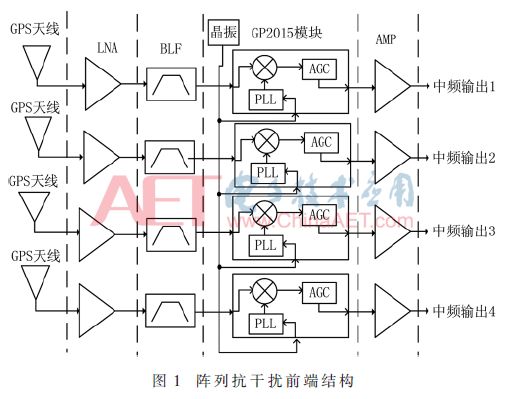
天线阵列射频前端是在上述基础上进一步设计。如图1所示,系统由4路构成。每一路信号链路包括低噪声放大器(Low Noise Amplifier,LNA)、频带限制滤波器(Band Limiting Filter,BLF)、混频器(MIXER)、锁相环(Phase Locked Logic,PLL)、自动增益控制器(Automatic Gain Control,AGC)、中频放大器(Amplifier,AMP)。
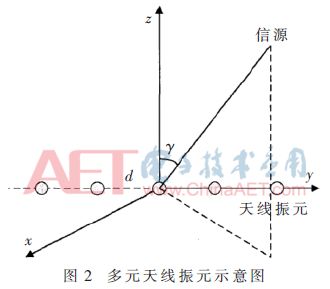
天线采用均匀直线阵列,将4路天线等间距排在一条直线上,结构简单,仿真容易。设入射波长为λ,两天线间距为d,光速为c,信源以γ角度入射到均匀直线阵列,如图2所示。
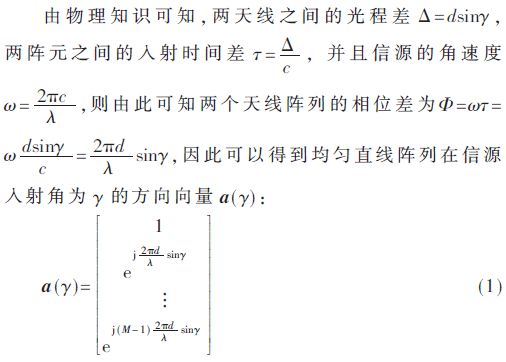
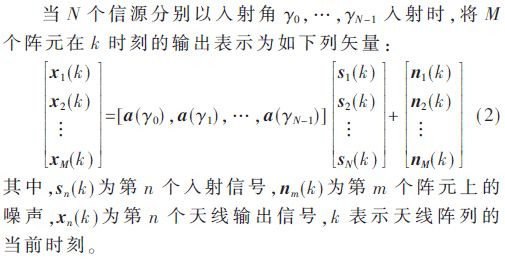
当N个信源分别以入射角γ0,…,γN-1入射时,将M个阵元在k时刻的输出表示为如下列矢量:
2 系统硬件电路设计
2.1 低噪声放大器LNA
为了提高接收信号的灵敏度,在接收机的最前端采用低噪声放大器。系统的噪声系数F定义为输入、输出信噪比的比值:
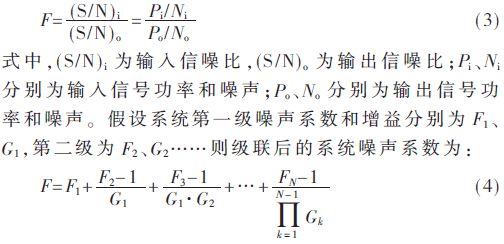
式中,N为级联的级数。由式(4)可知,最前端放大器的噪声系数F1和增益G1对整个接收机的噪声系数起决定作用[11]。低噪放的选择需要考虑:线性范围、反射系数、功耗、工作频率、工作带宽及通带内的增益平坦。
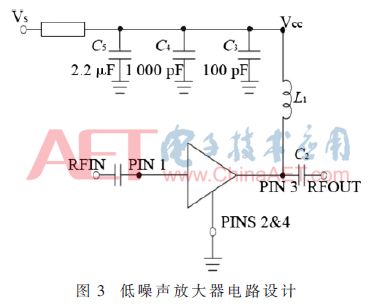
低噪声放大器件采用HMC478ST89,工作频段广,在1 GHz~2 GHz频段内具有19 dB的固定增益而且噪声系数只有3 dB。电路如图3所示,Vs为供电电压,RFIN为输入信号,RFOUT为输出信号。
器件的S参数如图4所示,S21表示增益,在GPS L1频段(1 575.42 MHz)为20 dB。在室外条件下,天线输入GPS信号功率为-80~-60 dBm,经过低噪声放大后,功率达到-60~-40 dBm,满足系统设计要求。

2.2 频带限制滤波器BPF
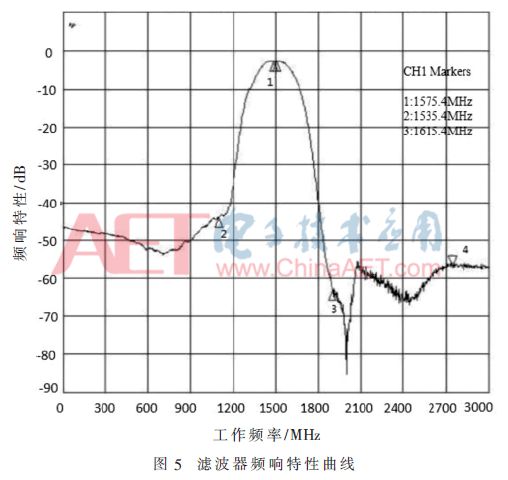
为滤除卫星导航信号频带外的噪声,一般在每级低噪声放大器输出端接入带通滤波器BPF[12],也称预选器,用来预选频段,并抑制镜像干扰、带外干扰和各种噪声[13]。本系统采用的是无源声表面滤波器SF1186B,中心频率为1 575.42 MHz,1 dB带宽2.046 MHz,插入损耗最大3.5 dB。该器件频响特性测试结果如图5所示,在GPS L1频段1.5 GHz左右,衰减为-2 dB左右,满足系统设计要求。
2.3 GP2015模块设计
GPS天线信号在经过放大、滤波之后,通过GP2015芯片下变频到中频信号。GP2015芯片具有低功耗、低成本、高可靠性的特点,工作电压为3 V~5 V。该芯片包括:PLL(锁相环)、三级混频器、AGC(自动增益控制器)、中频滤波器件以及两位ADC(模数转换器)。其内部详细结构如图6所示。
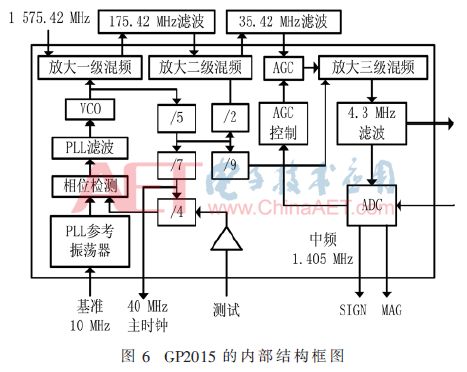
内部集成的PLL对基准时钟进行倍频,得到频率为1 400 MHz的本振信号LO1。采用三级混频结构,基准时钟来自温度补偿晶振(TCXO)的10 MHz。外部输入的GPS L1频段1 575.42 MHz信号与LO1进行一级混频,得到频率为175.42 MHz差频信号。经过LC滤波器后与LO2(140 MHz)进行二级混频,得到35.42 MHz差频信号。再通过声表面波滤波器进入内部AGC电路与LO3(31.11 MHz)进行三级混频,得到频率为4.309 MHz信号。该中频信号可通过内部2位A/D转换器输出两位数字信号:符号(SIGN)和量级(MAG),分别表示信号的极性和大小,数字信号输出给基带处理器进一步处理;也可直接输出模拟信号,供外部A/D采样。本设计采用直接输出模拟中频信号的方式。
2.4 基准时钟
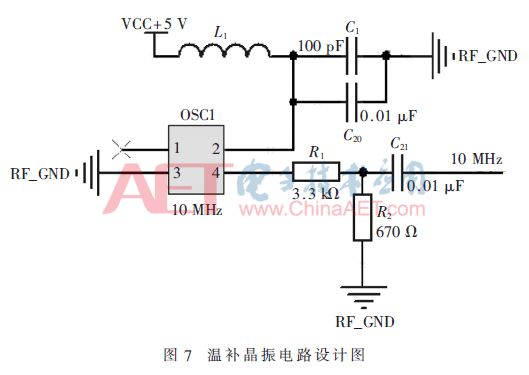
本系统使用的GP2015器件要求10 MHz基准时钟输入,对频率的精确度和稳定度要求都比较高。系统采用有源温补晶振,频率10 MHz,输出功率8 dBm,谐波抑制-25 dB,杂波抑制-70 dB。具体电路如图7所示。
2.5 中频放大AMP
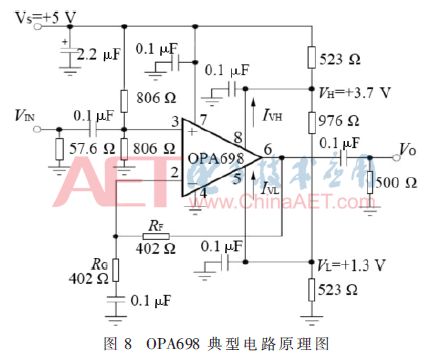
混频以及各级滤波会导致信号衰减,但是后级A/D采样需要中频信号达到0 dBm。因此,在GP2015输出端加上了一级中频放大器。中频放大器件是OPA698,它具有宽带高线性、快速响应、低功耗、反馈型宽带限压放大特性,能够实时调节电压幅度输出。
图8所示为该器件的电路图,输入信号为VIN,输出为Vo。通过调节反馈电压VH/VL来控制增益变化,使输出信号为0 dBm左右。
3 系统性能测试
国家自然科学基金项目委对该系统进行了测试,包括:单频信号测试、GPS接收机测试。测试仪器:信号源Rohde&Schware(R&S)SMB100A Signal Generator,频率范围为9 kHz~6 GHz。V.KEL接收模块:频谱仪R&S FSC6.Spectrum Analyzer,频率范围为9 kHz~6 GHz。
3.1 单频信号测试
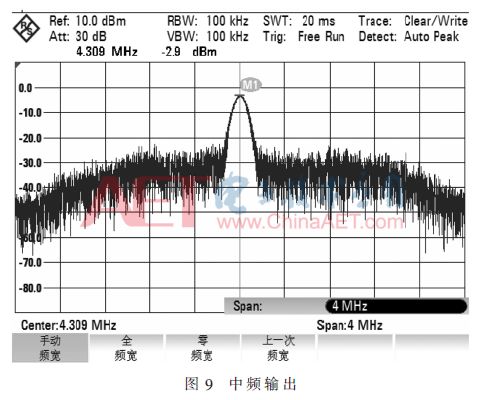
利用信号发生器产生频率为1 575.42 MHz、功率为-80 dBm的单频信号,来模拟GPS L1频段天线信号进行测试。该信号为四元天线阵列抗干扰射频前端的输入信号。
图9所示为第一路输出信号的频谱图(另3路输出同图9),频率为4.309 MHz,带内平坦度为0.2 dB,带宽为3 MHz左右,信号功率为-2.8 dBm左右。该结果表明阵列GPS抗干扰射频前端工作正常,满足后级AD采样的需求。
3.2 GPS接收机测试
为了使天线阵列抗干扰射频前端应用于GPS接收系统中,搭建了GPS接收机测试平台。如图10所示,阵列射频前端接入4路天线信号,接入GPS抗干扰基带处理模块,再通过上位机显示收到卫星数据。
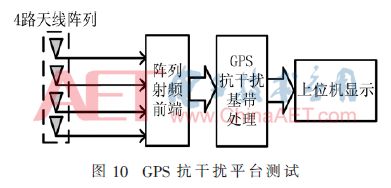
图11所示为应用本接收前端后的卫星信号接收图,共计10颗卫星,信噪比高达50 dB左右,符合通信系统指标要求。该结果表明,天线阵列抗干扰前端在干扰下能够正常工作,系统设计可行。

4 结束语
本文设计了用于GPS接收机的天线阵列抗干扰射频前端。文中对功放、滤波以及GP2015模块进行了硬件电路设计,对系统进行了单频信号测试、GPS接收测试。该设计投入使用后,能够较好地处理阵列GPS信号,满足设计要求。相比于目前通用的GPS信号射频前端,它具有抗干扰性能强、电路简单、可同时处理四路信号等优点,对GPS抗干扰技术的研究具有一定参考价值,同时能够为北斗系统所用,在抗干扰方面有借鉴意义。
-
基于超表面天线阵列的射频前端与数字后端联合抗干扰方案2024-02-20 1630
-
基于微波暗室下的抗干扰接收机测试研究2023-10-19 892
-
为有源天线阵系统选择高效节能窄带接收机的方法2022-11-16 571
-
三款GPS接收机射频前端电路图解析2020-04-23 9004
-
射频仿真系统的天线阵列怎么校准?2019-08-21 2863
-
基于车载系统的GPS接收机射频前端设计2019-06-26 2917
-
美军装备首台抗干扰GPS接收机,关键在波束可控天线2018-12-31 8648
-
关于GPS天线阵抗干扰射频前端设计2018-06-07 12024
-
用于GPS接收机的功率倒置阵抗干扰性能研究2015-08-26 2632
-
GPS接收机基本工作原理2011-09-03 23565
-
GPS接收机射频前端电路原理与设计2010-02-08 903
-
基于GA的智能天线系统前端扇区阵列设计2009-07-29 5753
-
一种应用于车载系统的GPS接收机射频前端的设计2009-05-13 1351
-
GPS接收机射频芯片2008-12-13 1940
全部0条评论

快来发表一下你的评论吧 !
