

开疆智能ModbusTCP转Profient网关连接ER机器人配置案例
描述
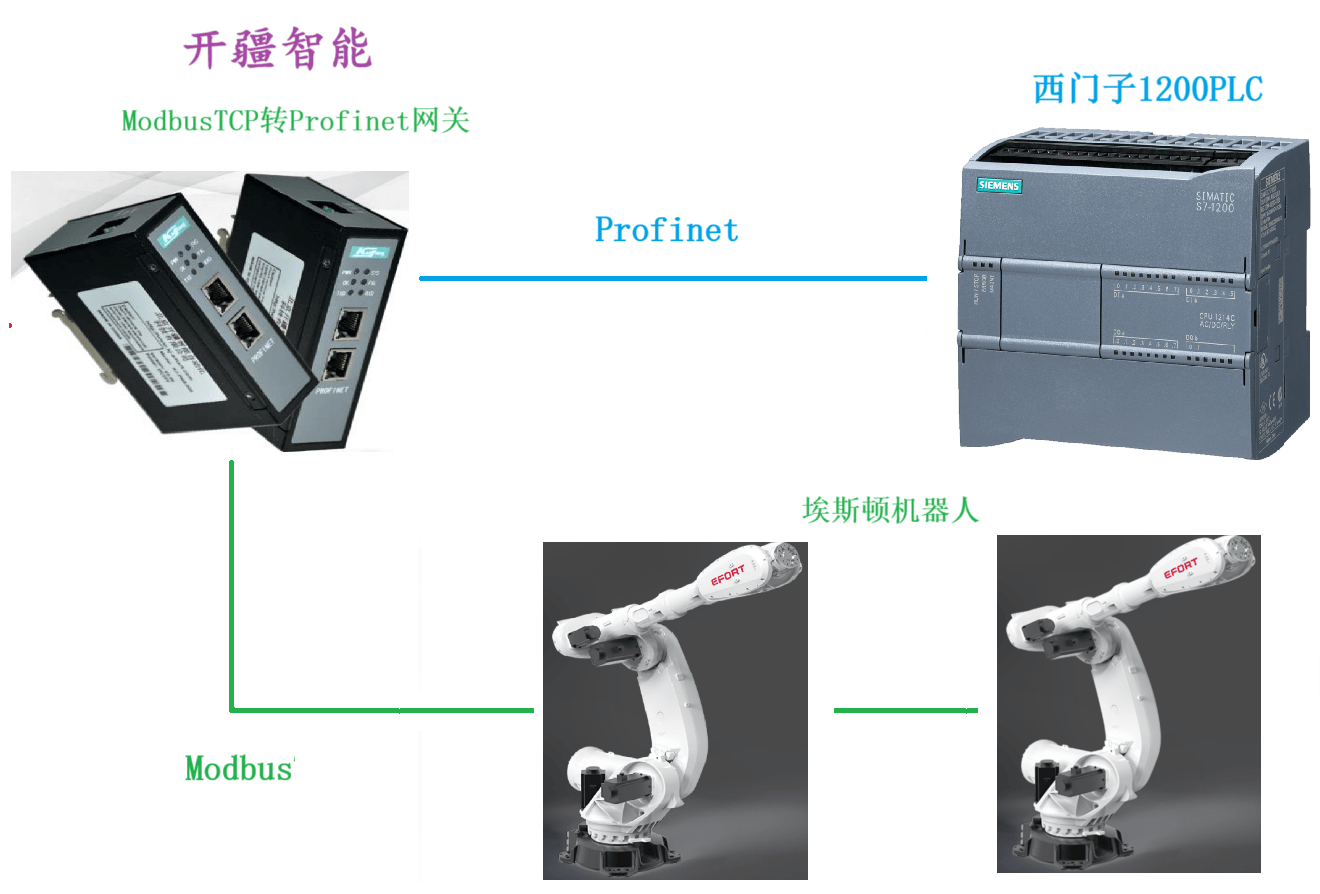
本案例时西门子1200PLC通过ModbusTCP转Profinet网关连接埃斯顿机器人的配置案例,网关作为ModbusTCP的客户端连接机器人。
配置过程:
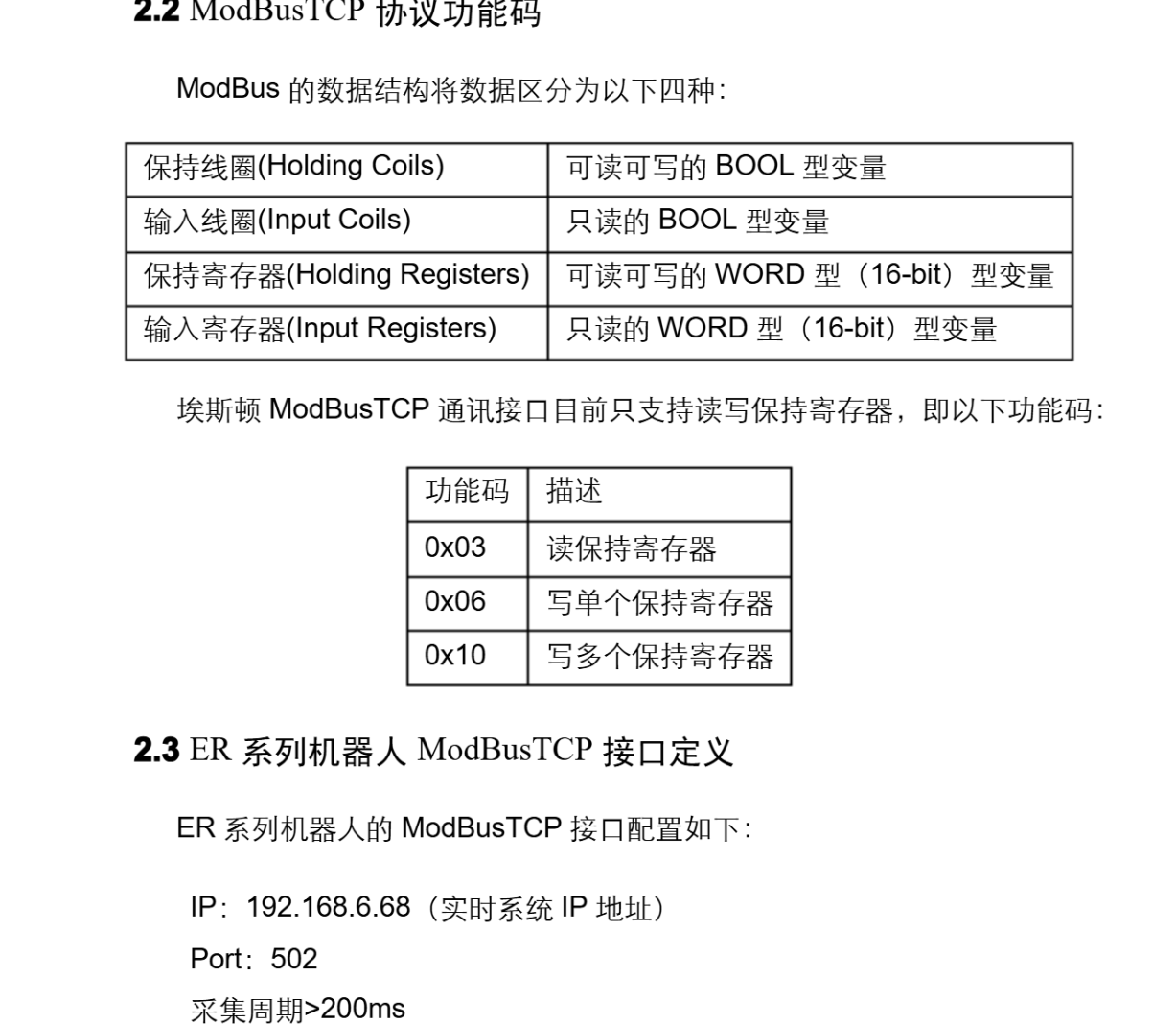
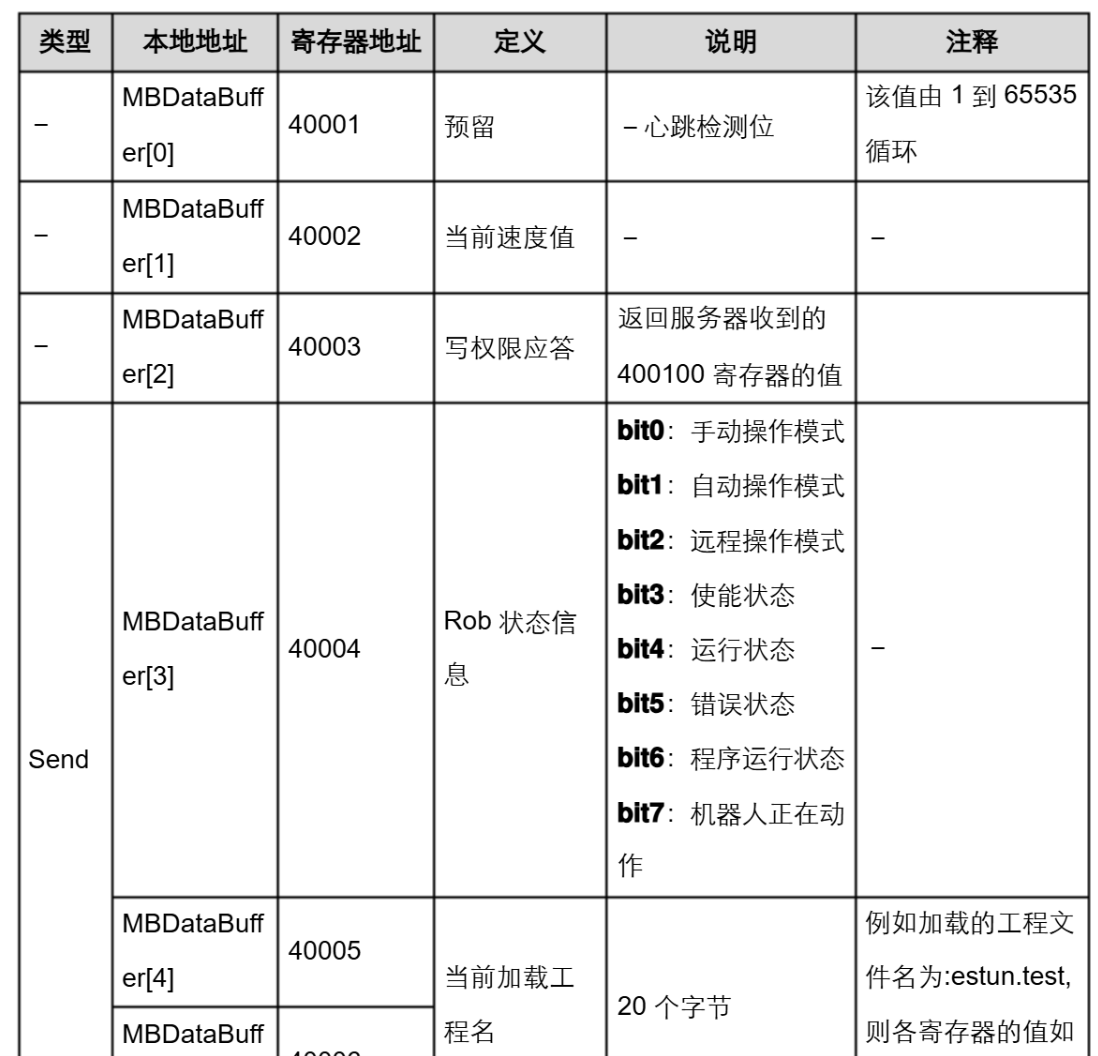
首先打开机器人通讯手册。查询机器人支持的功能码及默认IP和端口号
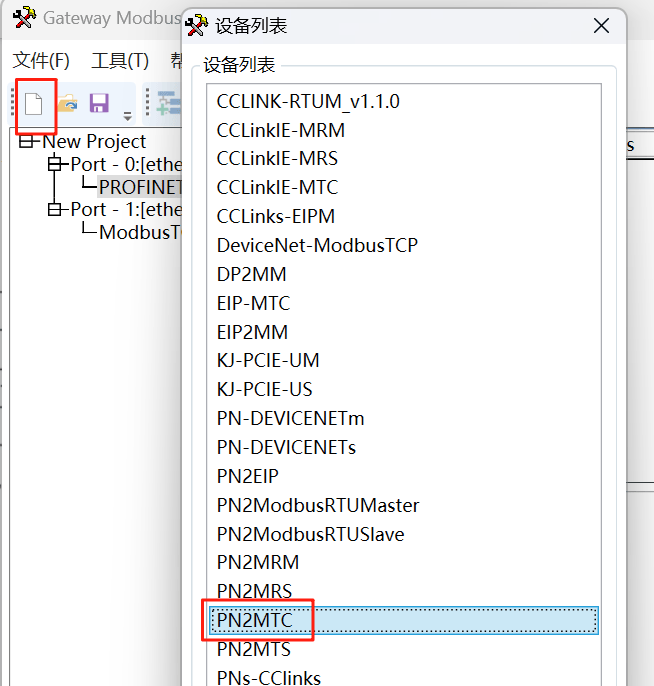
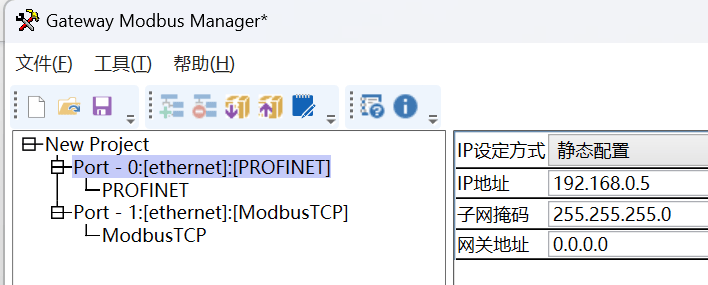
打开网关配置软件“Gateway Configuration Studio”新建项目“PN2MTC”
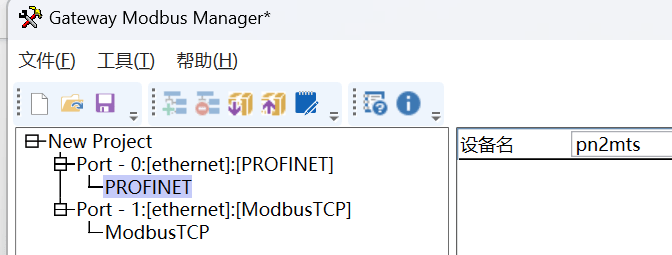
设置网关在Profinet一侧的设备名称与IP地址,与PLC一侧组态配置保持一致。
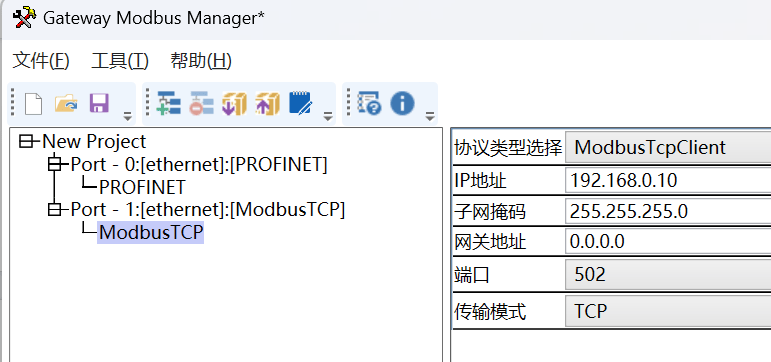
设置网关作为ModbusTCP客户端的IP地址,与机器人保持同一网段。
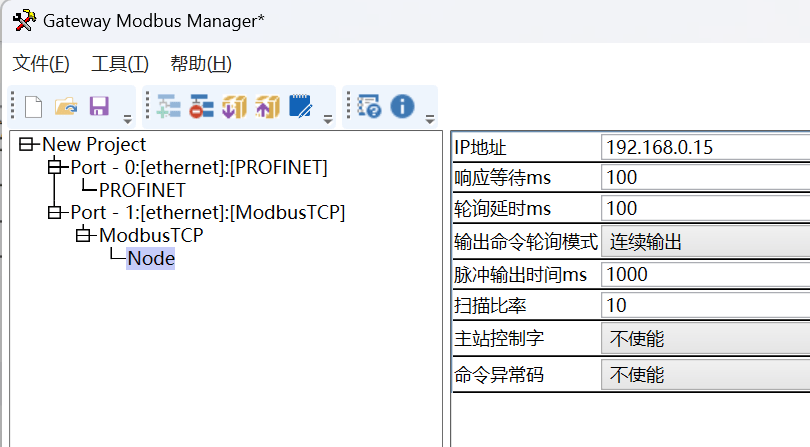
添加Node并填写机器人IP地址,并设置读写时间参数。
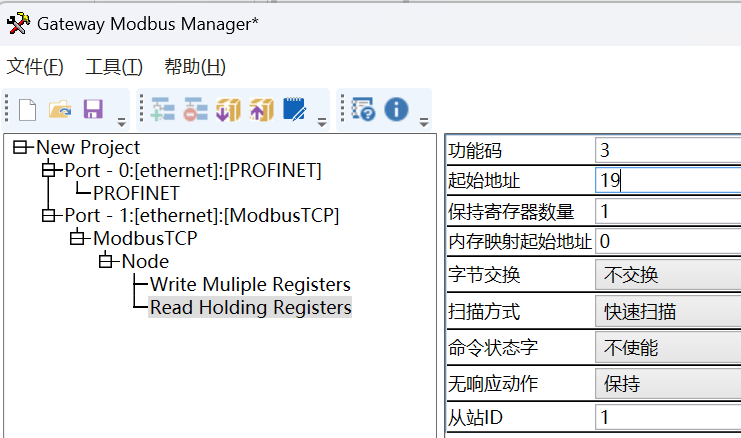
选择需要用到的功能码用于对机器人进行读写。
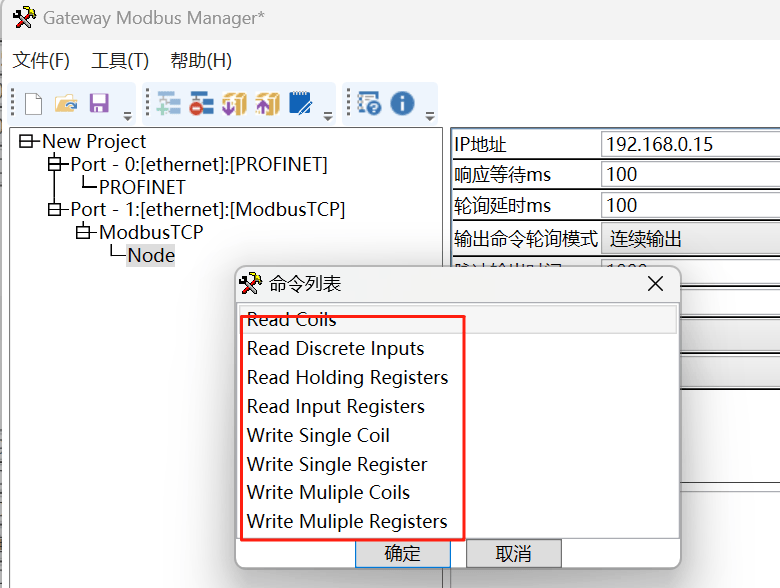
根据需要填写对应的寄存器地址与数量
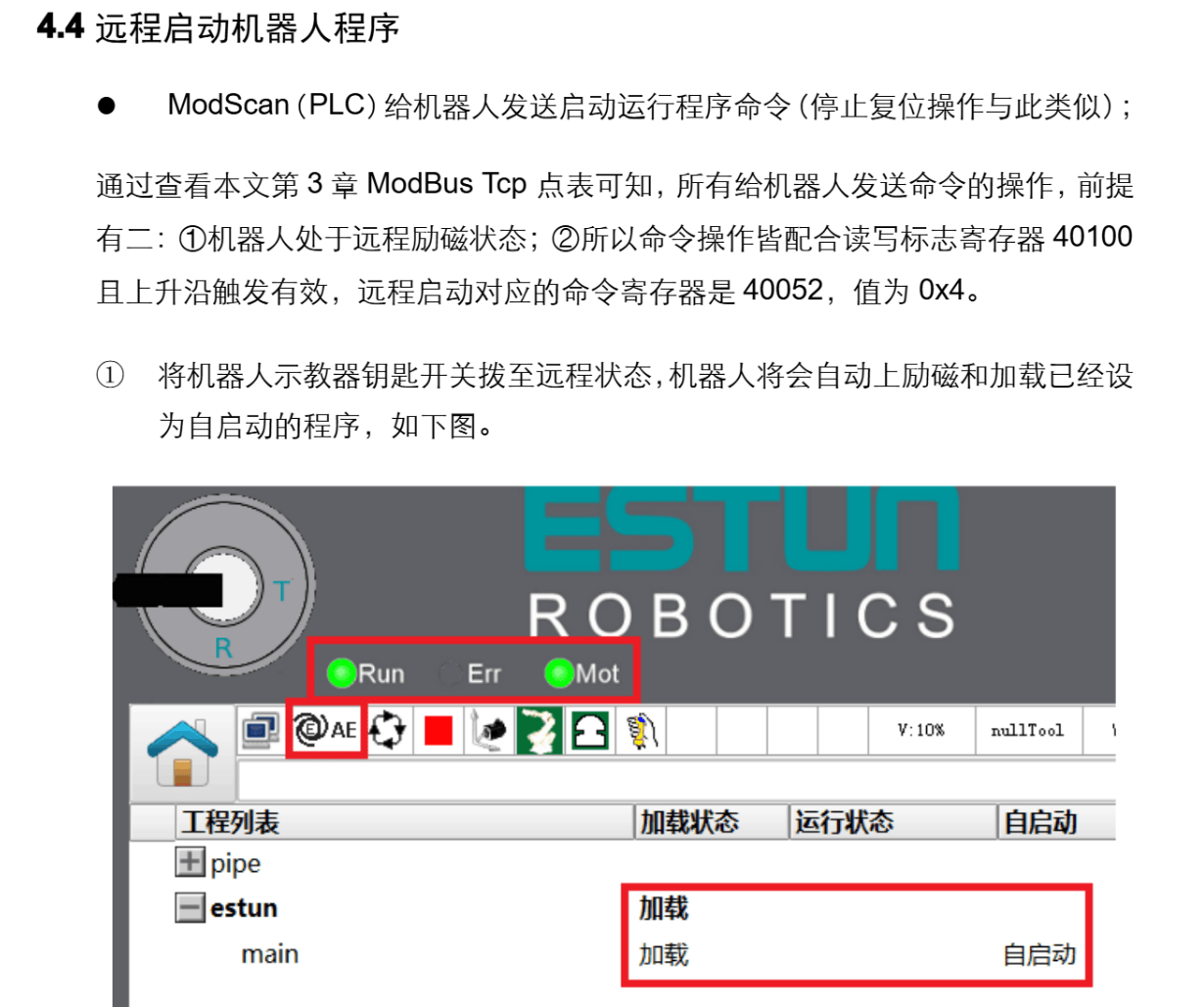
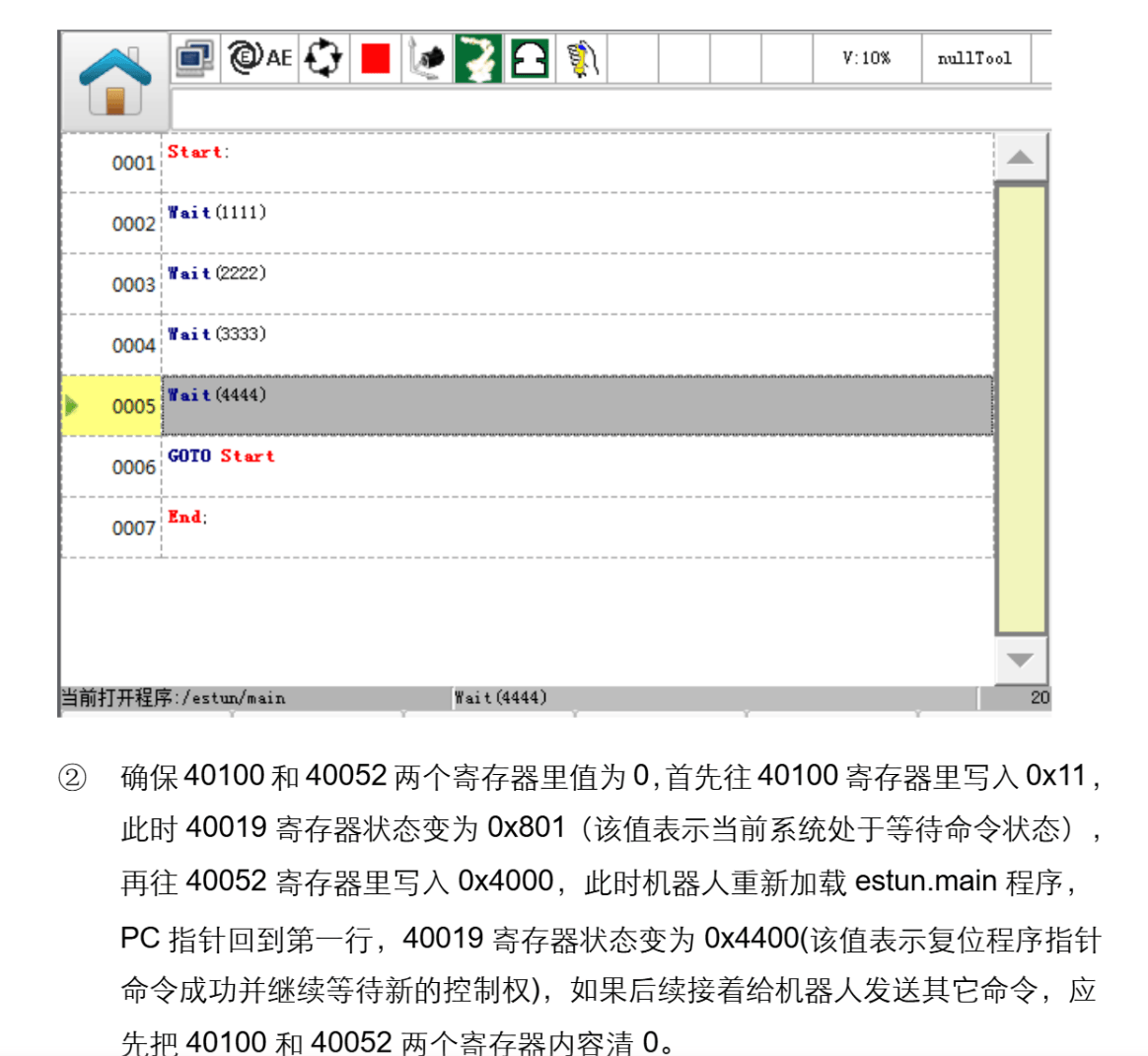
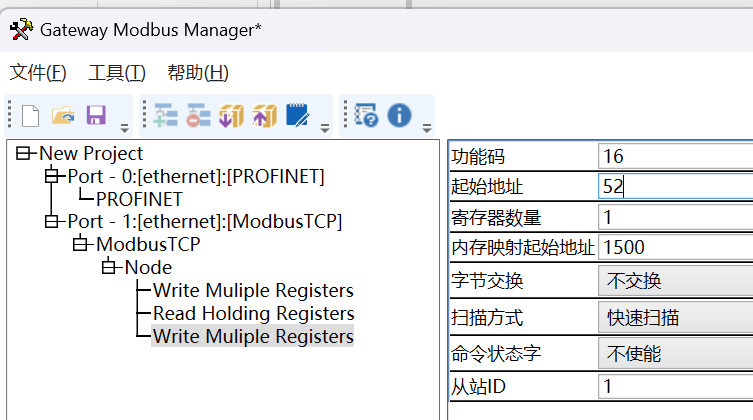
比如图中启动机器人要给寄存器40100写值
添加写寄存器功能码并写入地址100
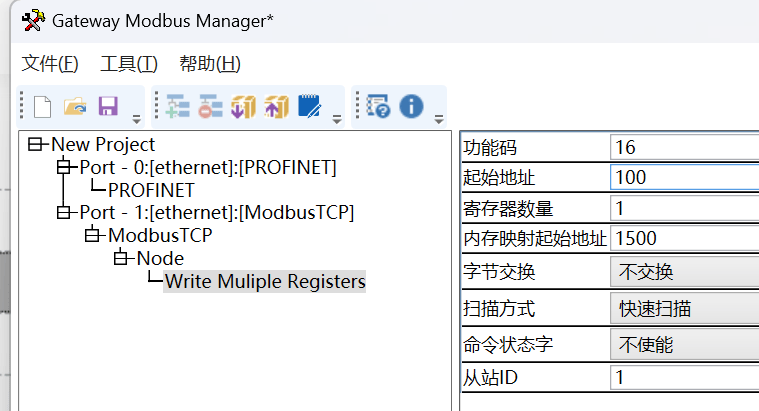
默认内存映射地址对应PLC的Q地址分配的起始地址。
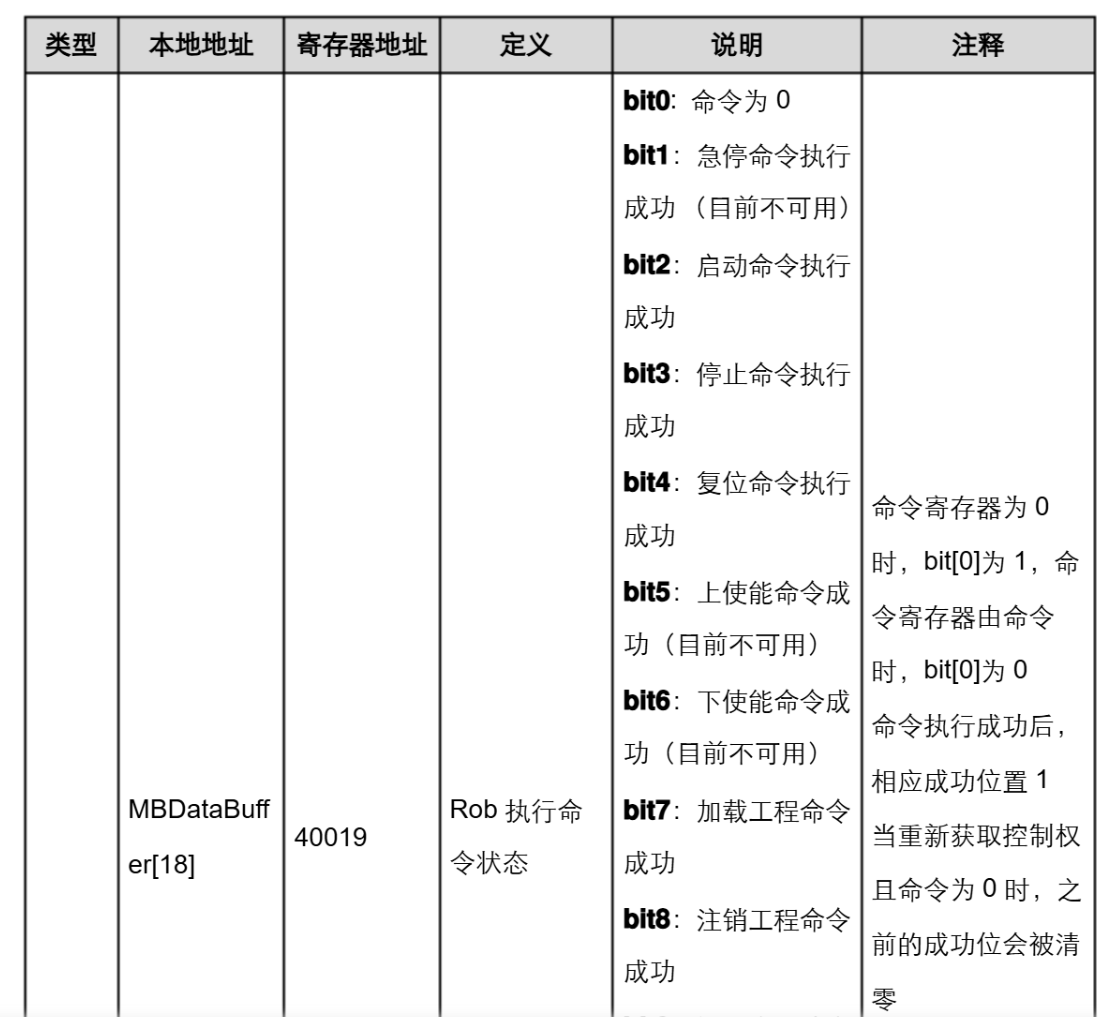
再读取40019数值和读取40052
下载配置到网关即可。
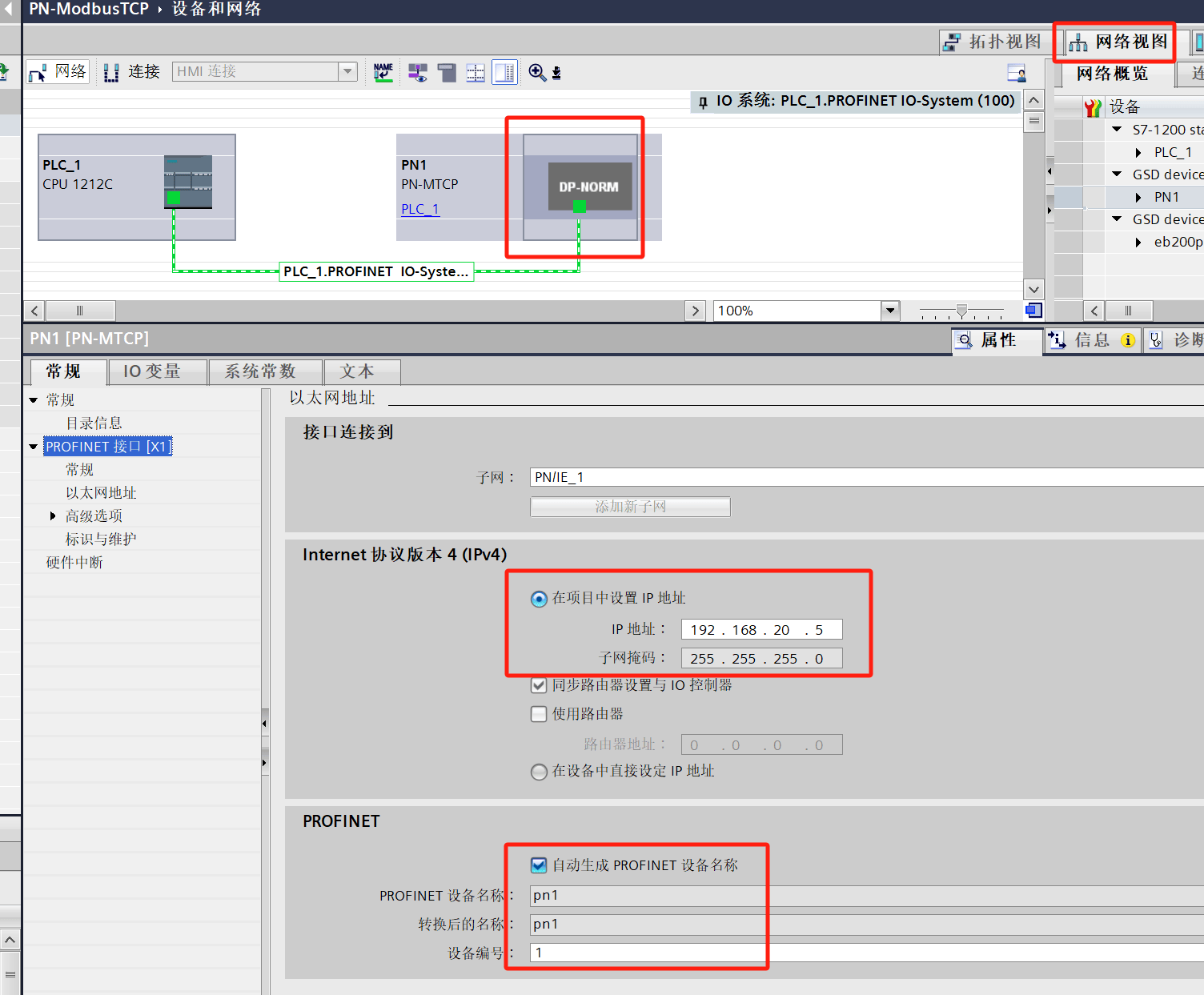
PLC配置
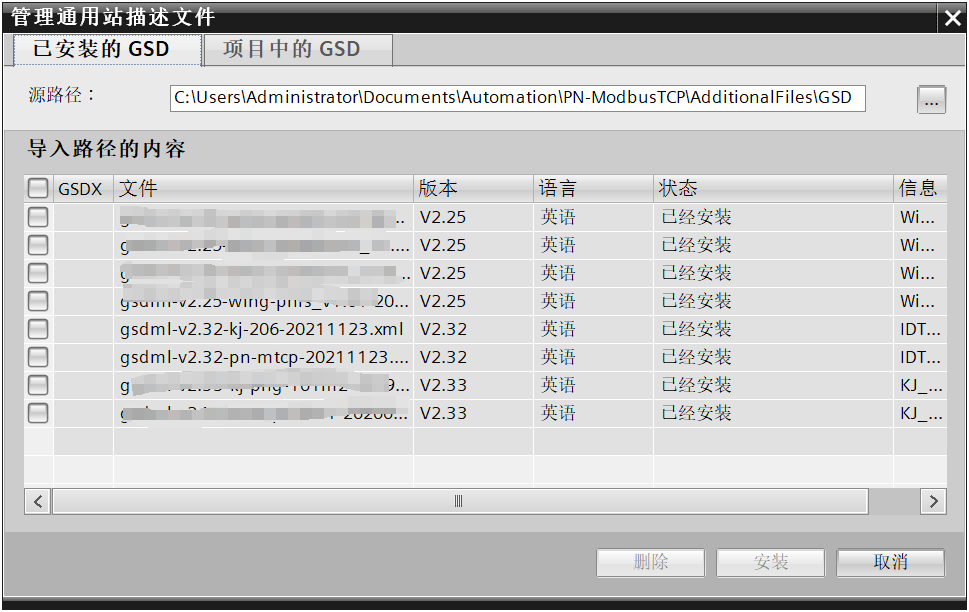
打开西门子PLC组态软件博图设置网关Profinet一侧的参数配置,首先导入网关GSD文件并设置PLC的IP地址
在网络视图中点击模块,设置网关的IP地址和设备名称
添加网关用到的数据输入输出长度
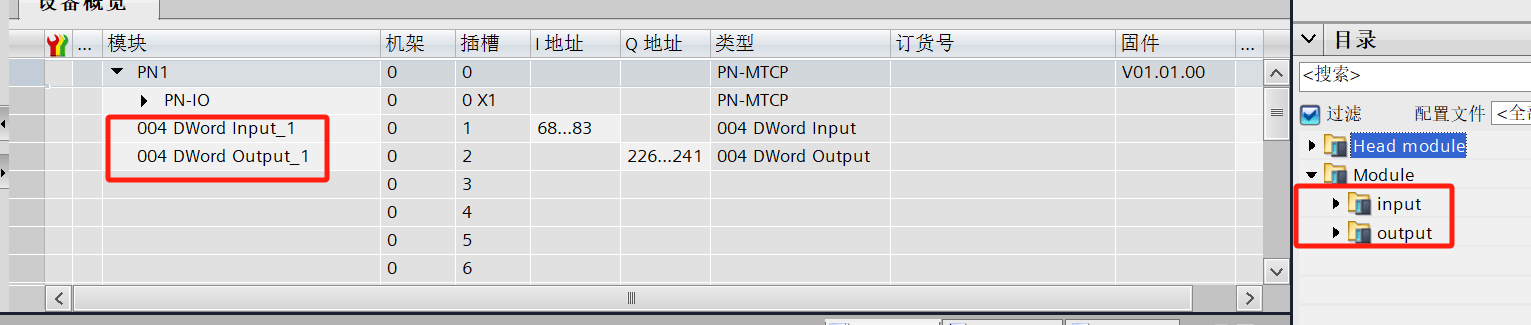
设置好分配的IQ地址,确认无误后下载到PLC
到此网关通讯配置全部完成,所有设备全部上电即可正常工作。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
开疆智能Ethernet转ModbusTCP网关连接UR机器人配置案例2025-08-14 1149
-
开疆智能ModbusTCP转Profient网关连接西门子PLC与川崎机器人配置案例2025-07-26 1832
-
开疆智能ModbusTCP转CClinkIE网关连接台达DVP-ES3 PLC配置案例2025-06-28 1775
-
开疆智能ModbusTCP转Devicenet网关连接远程I/O配置案例2025-06-23 1054
-
开疆智能ModbusTCP转Devicenet网关连接ABB机器人配置案例2025-06-12 1784
-
开疆智能Profient转ModbusTCP网关连接ABB机器人MODBUS TCP通讯案例2025-05-22 1149
-
开疆智能Profinet转ModbusTCP网关连接WINCC配置案例2025-05-17 1819
-
开疆智能Profient转DeviceNET主网关连接发那科机器人配置案例2025-01-14 1228
-
ModbusTCP转Profinet网关连接施耐德PLC配置案例2023-10-08 3014
全部0条评论

快来发表一下你的评论吧 !
