

HJMR2300三轴数字磁强计产品介绍
描述
01 概述
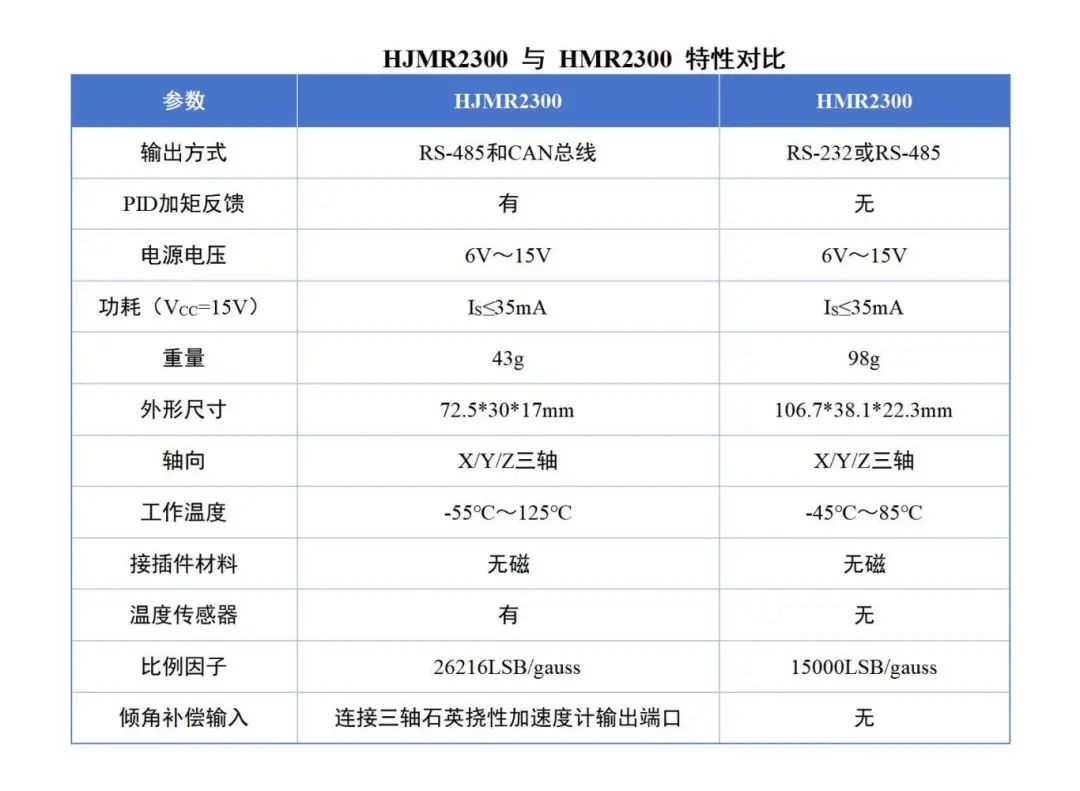
HJMR2300是一款全国产高精度三轴数字磁强计,用于检测磁场的强度和方向。HJMR2300内部由三轴高精度弱磁测量模块和16位AD采集系统组成,其中三轴高精度弱磁测量模块采用了调制解调技术和PID加矩反馈技术(航晶微电子专利),使得磁传感器探头一直工作在零高斯附近,从而减小零位时漂(dK0/dT)和二次非线性(K2)。通过周期性的置位/复位,使磁畴有序排列,从而能达到抵制外界强磁干扰和提高分辨率的目的。另外16位AD采集系统为8通道16位差分输入A/D采集系统,由输入箝位、二阶抗混叠模拟滤波器、采样/保持器、16位电荷再分布逐次逼近ADC、可编程数字滤波器、高速并行接口、精密参考源、低压差调整源、系统集成处理器(ISP)、驱动器等组成,全国产化替代进口HMR2300。
HJMR2300可以测量地磁场的X轴、Y轴和Z轴磁场矢量分量,三轴高精度弱磁测量模块的模拟输出通过内部的16位AD采集系统,转换为16位数字量,预留的三个通道用于采集三轴石英挠性加速度计信号,方便客户进行倾角补偿。数据输出为半双工RS-485(波特率9600)及CAN总线输出(速率250Ksps),广泛应用于航空、船舶自主导航,可直接接入AHRS系统,GPS备份系统,远程车辆监控,无人机,卫星姿态测控,以及石油随钻测斜等场合。
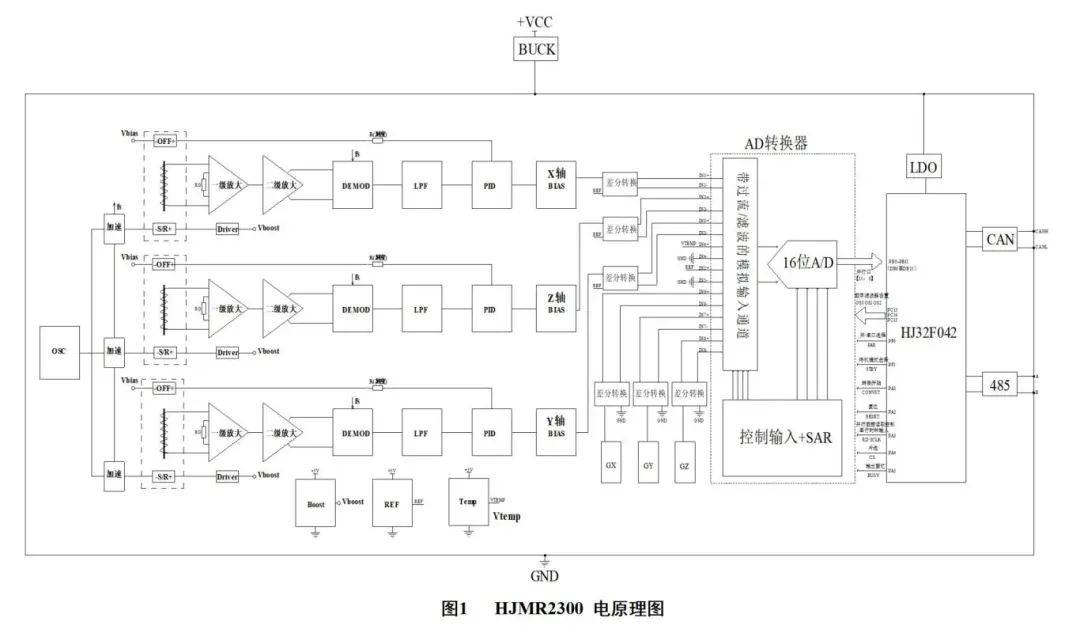
02 电原理图
03 封装形式及引出端功能
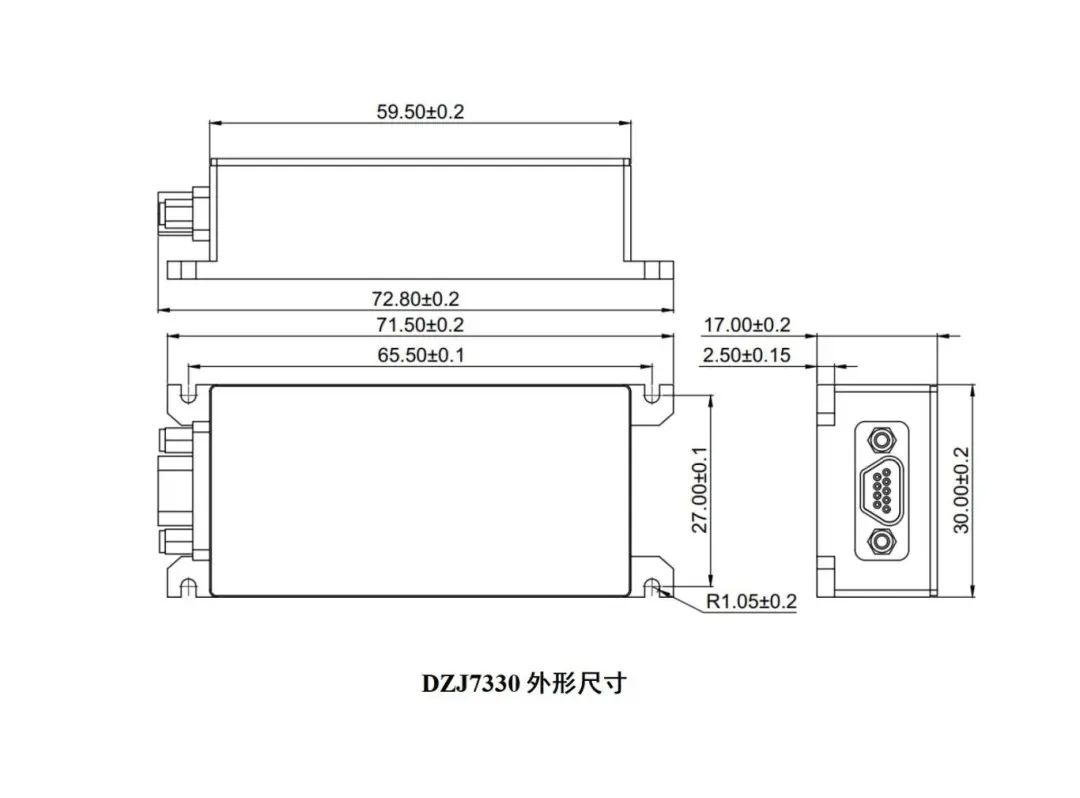
封装形式:
HJMR2300采用DZJ7230无磁金属封装。封装尺寸图和实物图如下:

引出端功能(采用J30J-9TJP无磁航空插头):

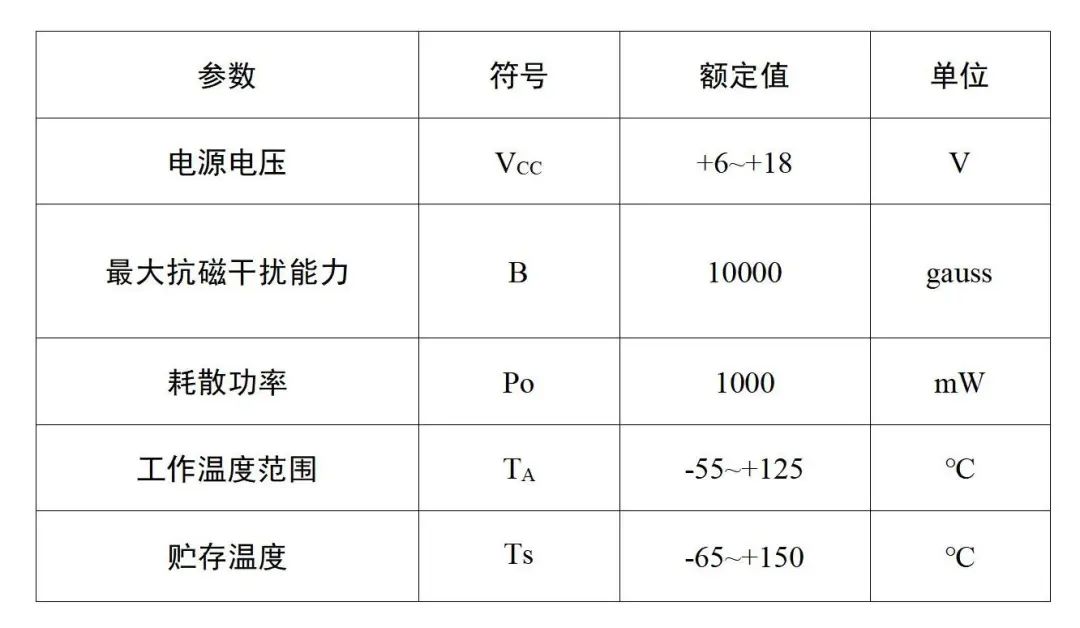
04 绝对最大额定值
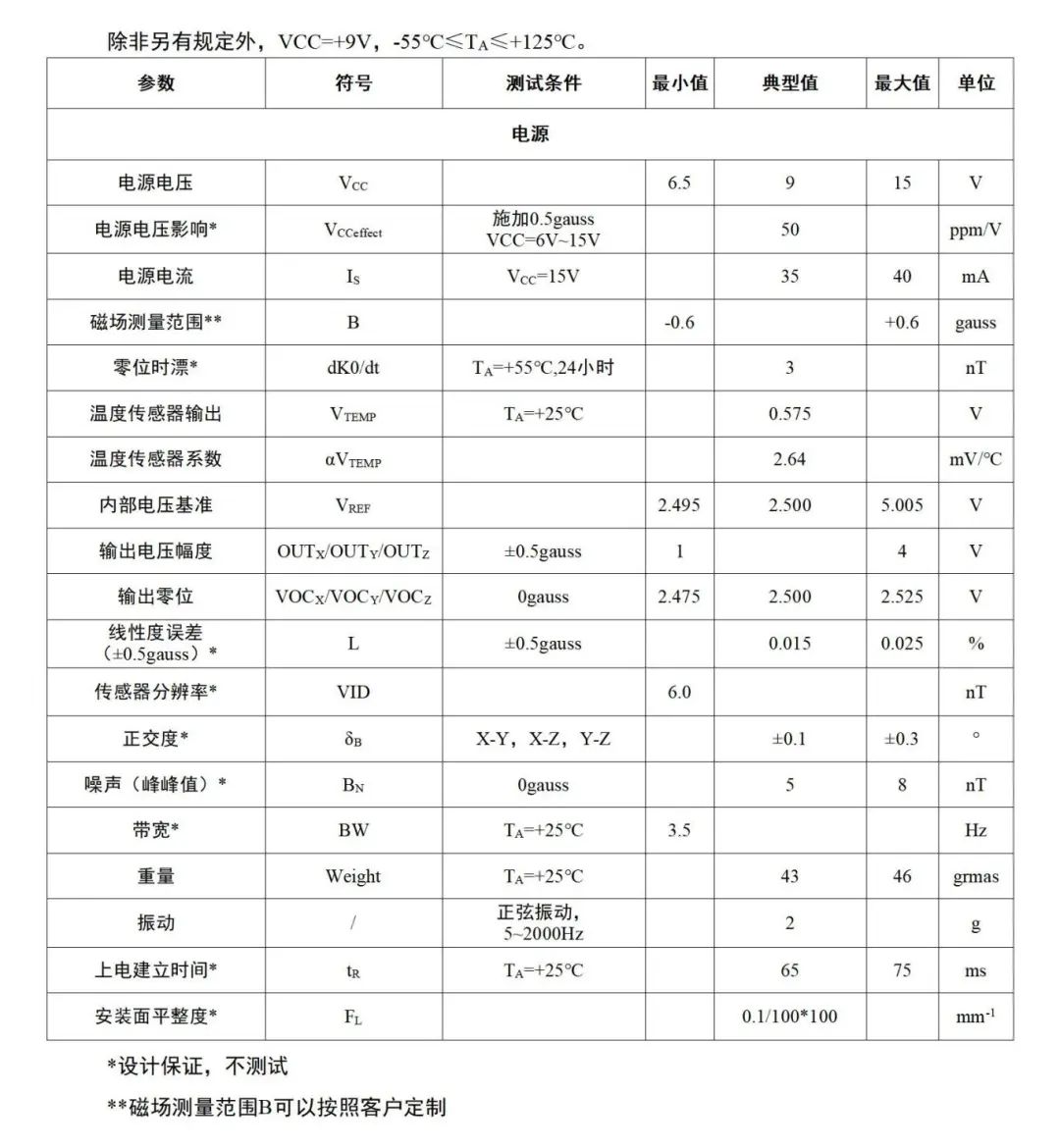
05 电特性
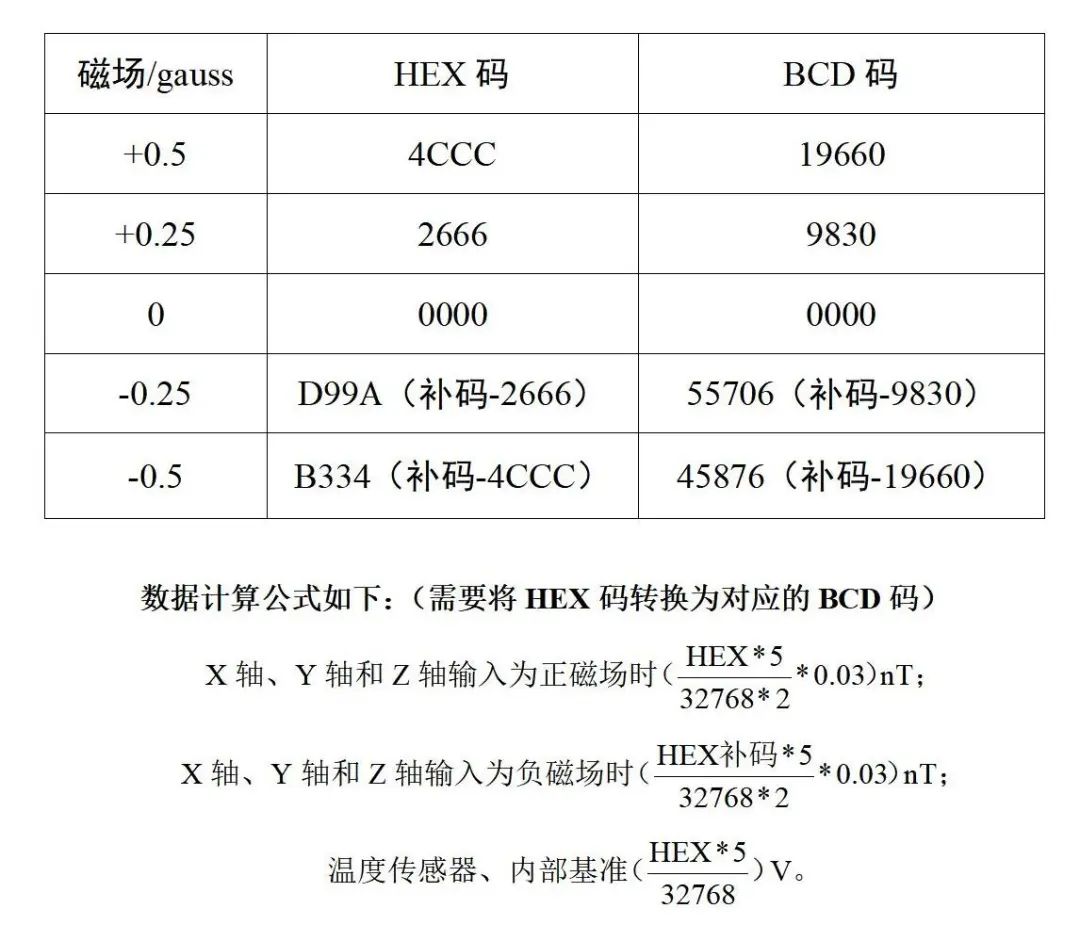
06 数据格式
HJMR2300将X轴、Y轴和Z轴的输出,以十六进制码的数据格式,通过RS485或CAN总线,发送给上位机进行数据处理,如下表所示。
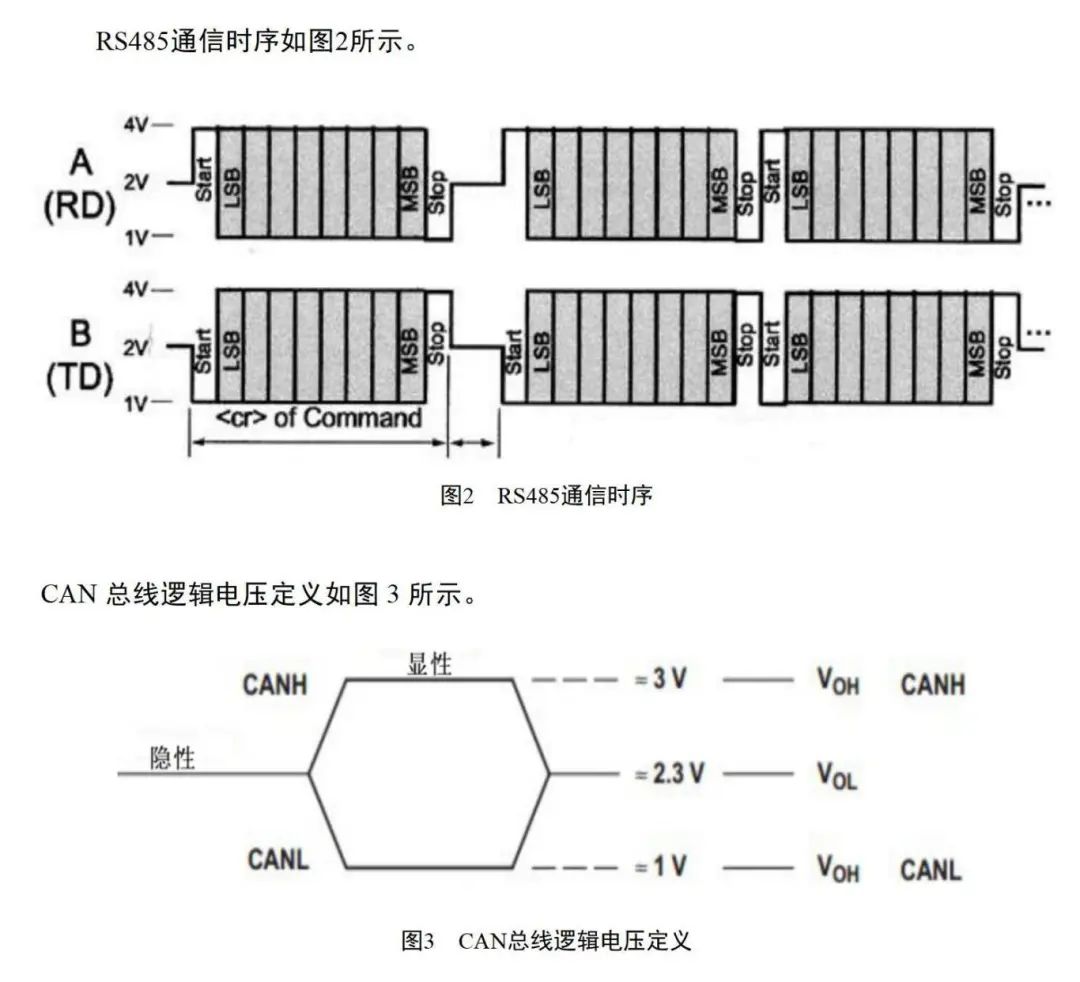
07 通讯时序
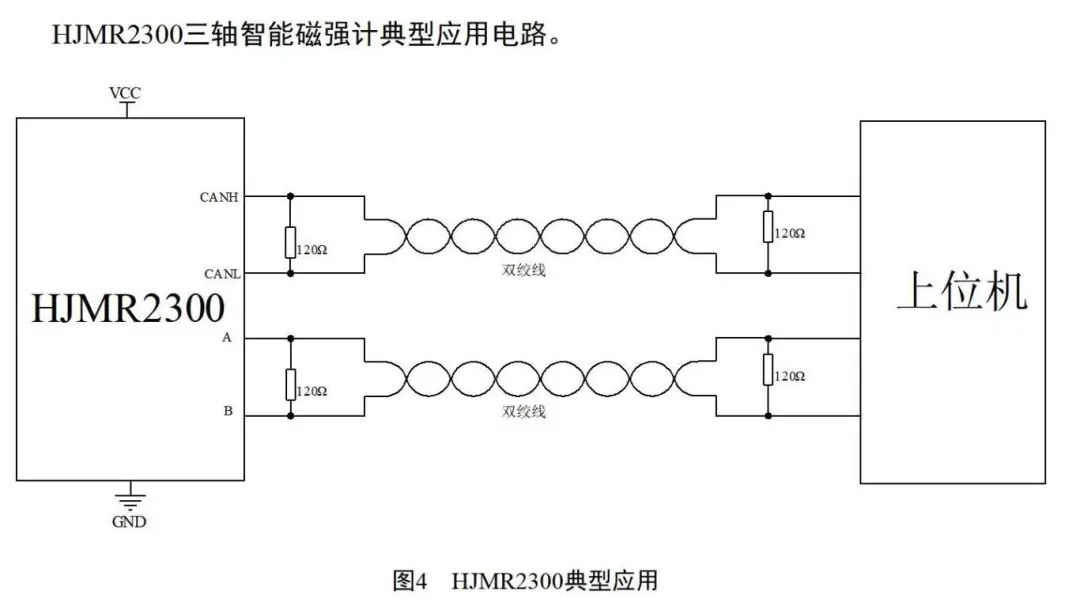
08 典型应用
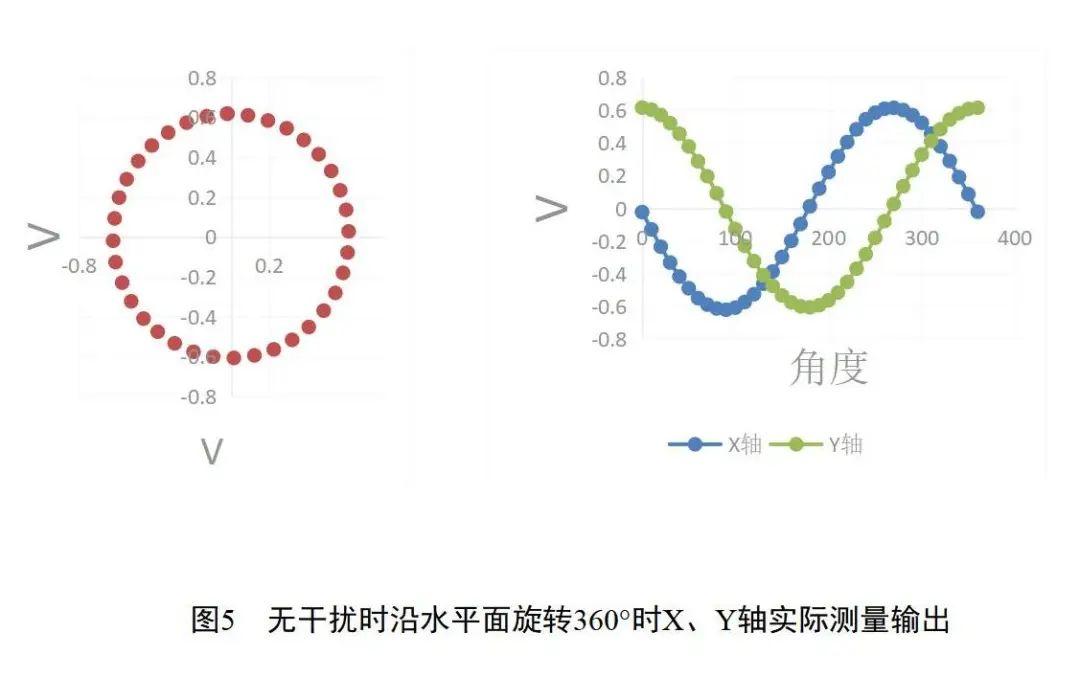
09 无干扰实测
无干扰时沿水平面旋转360°时X、Y轴实际测量输出(西安,北纬34°9’,东经108°58’)如下图所示:
10 注意事项
1.该模块采用无磁铝壳体、通过激光焊完成封盖。引出脚采用J30J-9TJP无磁航空插座,通过螺丝固定在壳体上,故该模块的封装不是一个气密封装,使用时不允许用清洗液清洗,也要预防其他酸、碱、盐、气氛渗入。
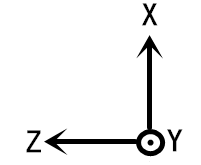
2. 模块三个正交轴的指向见下图(顶视图)。
3. 四个通孔(Φ2)上的螺丝应选用无磁螺丝固定器件。
4. 由于电流能产生磁场,故布局时应尽量避免单向大电流线靠近,以免产生噪声/零漂。若距离拉不开,则建议供电线和回线(即GND)同时等间距布排,能双绞最好。这样的布排有利于电流产生的磁场相互抵消。
5. 由于模块装配在装备中的磁环境各不相同,这些地方很可能有铁磁材料,铁磁金属(铁、镍、钢、钴)的影响会扭曲或弯曲地球磁场,最终会导致磁强计三轴输出的零位(K0)和比例因子(K1)发生变化。这些效应可以被认为是叠加在地球磁场上的磁场,如果磁强计牢固的固定在工装上,则可以计算铁磁效应并将其从磁读数中去除。
6. 将模块放置在磁屏蔽桶中,或者用坡莫合金材料包裹,加电在上位机测量X、Y、Z三轴输出,若数字量转换后模拟输出为2.5±0.025V,则表明连接正常;若测不出,第一要考虑连线是否断路。
7.为了提高AD采集精度,磁传感器模拟输出进行了2倍放大处理
8. 考虑到客户长线应用情况,已在模块电源端、485端口及CAN接口设计了浪涌保护电路。
9. 模块背面为安装基准面,是专门抛光处理的,故不能损伤。
10. 预留的GX、GY和GZ三个通道用于采集三轴石英挠性加速度计信号,方便客户进行倾角补偿。
11. 若用于飞机地磁导航,则必须要进行如下工作:
A、地球的地理北极与地磁北极不在一个点上,故要建模修正;
B、必须要针对经度进行建模修正,否则远航程飞行时误差会很大;
C、要与三轴加速度计捷联,从而完成针对飞机的俯仰角及横滚角建模修正;
D、详细的应用方案,请参考Honeywell公司的《Applications of Magnetoresistive Sensors in Navigation Systems》。
-
深入解析Honeywell Smart Digital Magnetometer HMR23002026-05-16 601
-
新品发布 | 多维科技推出HFM2905高频磁强计-精准捕捉高频磁场2026-03-17 559
-
航晶微高精度三轴数字磁强计HJMR2300通过权威校准2025-11-11 1084
-
磁强计是如何定义的?磁强计有哪些分类?2024-02-19 6205
-
小三轴荷重试验机是什么?有哪些介绍2023-12-07 1070
-
UM2300_介绍步进电机驱动软件扩展包2022-11-22 532
-
ADXL345倾斜度三轴数字加速度模块的电路原理图2020-06-11 5242
-
digilentPmodACL三轴加速度计介绍2019-12-02 3399
-
关于三轴数字高斯计/特斯拉计的介绍和应用分析2019-10-25 4907
-
LSM303DLH传感器模块: 三轴加速度计和三轴磁强计2017-10-11 1667
-
L3G4200DH高性能三轴数字输出陀螺仪2010-04-14 3522
全部0条评论

快来发表一下你的评论吧 !
