

船舶深水惯导系统零部件测量方案:三坐标检测四孔行星定位结构几何精度
描述
惯导系统内部关键零部件带4孔定位,内装光纤陀螺仪,安装的陀螺仪需要保障准确的位置度及角度关系,因此,该零件需要对上下顶面的平面度,前后左右圆柱的同轴度、垂直度、各孔的直径以及4孔两两同轴度及4孔的孔轴线交点位置,各孔之间角度有着很高的检测精度要求。
该核心部件采用四孔行星定位结构,其几何精度直接决定陀螺仪测量基准的可靠性。面对多层级空间关系测量,当前检测手段缺点:
1、量具盲区:传统测量手段尺类无法触及内部孔系,无法检测到内部孔尺寸及圆度、位置度等参数;
2、影像局限:传统测量仪器影像、轮廓等无法检测到各内控的相对位置关系,难以捕捉孔轴线空间夹角;
3、精度壁垒:该零部件制造公差很小,大约在0.01mm左右,仪器的误差需要控制到3.5微米以内。
高精度三坐标检测解决方案及配置
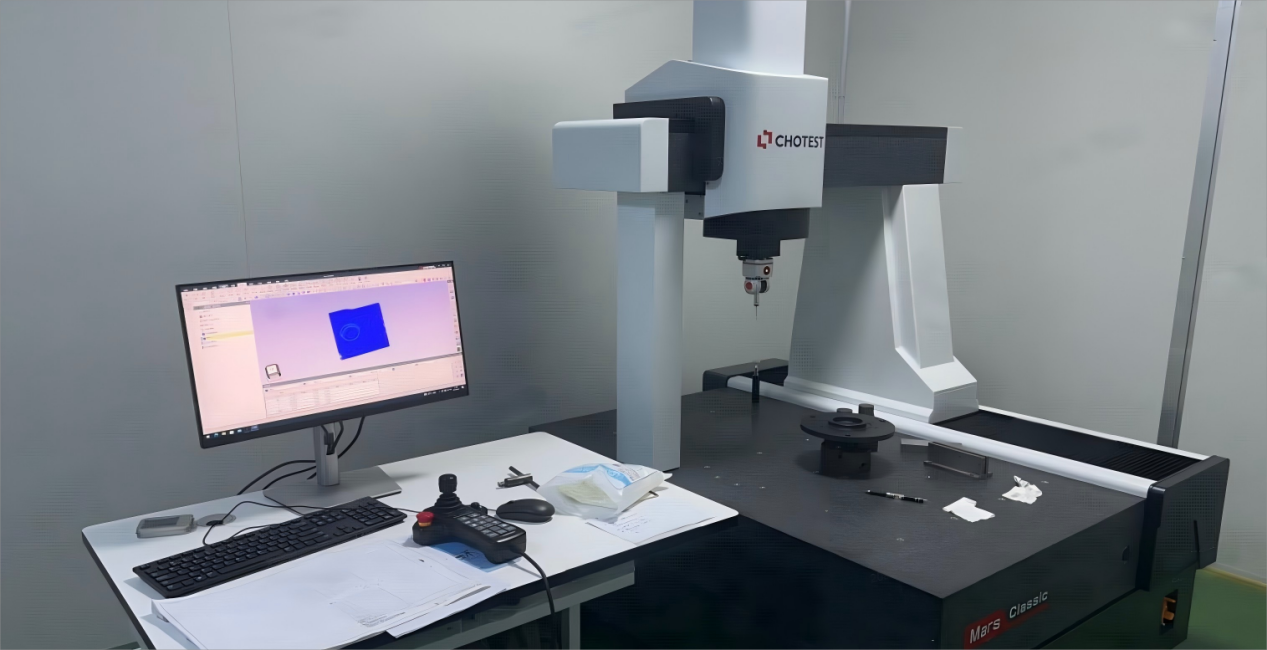
根据工件最大尺寸和最小公差去选择,Mars Classic 686高精度移动桥式三坐标配合PowerDIMS系统,关键部组件用的是中图全自主的测头系统,创新性实现微米级空间解析:
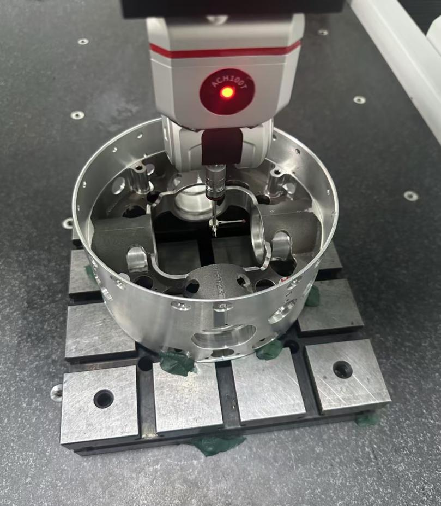
1、五方向星型测针采集四孔数据
三坐标检测采用五方向星型测针组同步采集四孔数据,突破传统单测针的视角局限,为惯导系统关键零部件的内孔各孔轴线同轴度、角度位置关系及各轴的交点高精度检测提供了可能性。
2、智能测量闭环
(1)CAD驱动:Power DIMS 软件的CAD数模导入,智能化、模块化设计简单易懂,大大提高了操作人员的编程效率,软件自动识别四孔最优测量角度;
(2)安全空间防护:防碰撞系统在安全距离内自动修正路径;
(3)双模式融合:手动与自动模式的自由切换使机器具备快速批量检测能力。
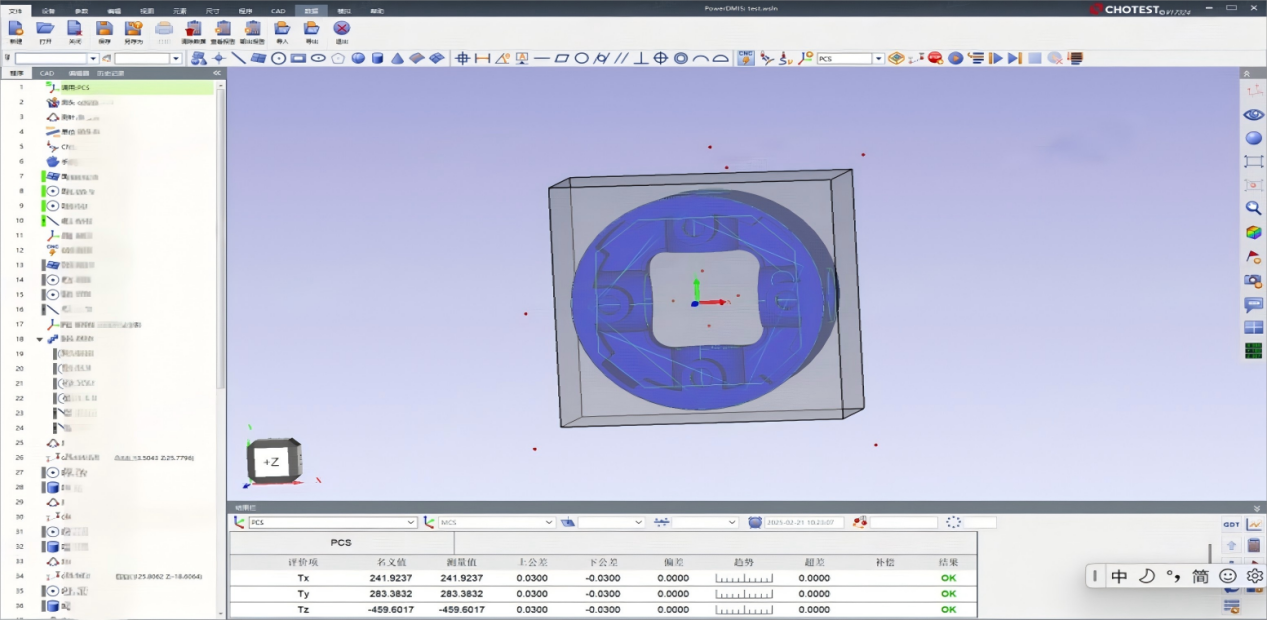
测量过程:
根据提供的工件CAD模型,快速拾取需要测量的元素,利用软件自带的安全空间功能可以在保证测量安全的前提下最大的提高测量效率,手动与自动模式的自由切换使机器具备快速批量检测能力。
-
三坐标检测船舶深水惯导系统零部件(四孔行星定位结构几何精度)2025-08-11 744
-
三次元三坐标测量机精准检测富士康3C产品零部件2024-11-07 2184
-
三坐标CMM三次元用于测量电子零部件2024-06-04 1524
-
三坐标测量机在汽车零部件质量控制中的应用2024-05-24 2161
-
蔡司三坐标测量仪三次元检测设备测量电子零部件2024-04-25 1533
-
三坐标测量机测量特性详解,探究检验车间零部件的多重优势2024-01-19 1353
-
家电产品扇叶零部件自动化三维检测设备高精度3D测量系统2023-11-29 2037
-
图像尺寸测量仪:解析适用零部件与应用领域2023-09-11 10746
-
高精度三坐标测量机怎么使用?2023-03-17 3083
-
三坐标测量机-汽车零部件几何量测量与品质控制系统2023-03-14 1246
-
三坐标测量机——汽车零部件几何量测量与品质控制系统2023-03-13 2172
-
汽车零部件尺寸全检测量方案2022-08-15 17244
-
Leitz Reference BX测量方案实现对零部件检测精度最大化2020-01-01 3400
-
容器零部件2009-09-16 3494
全部0条评论

快来发表一下你的评论吧 !
