

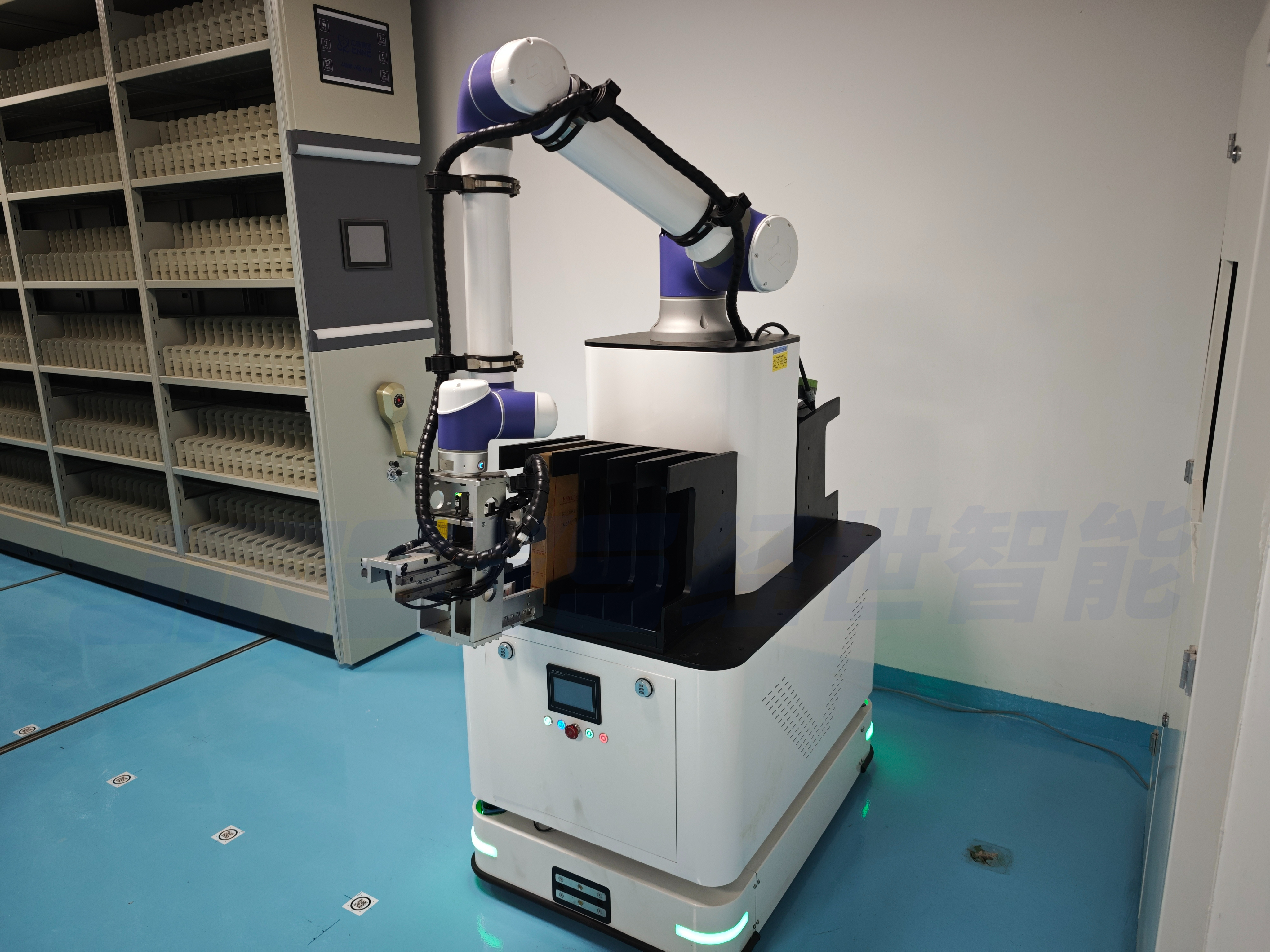
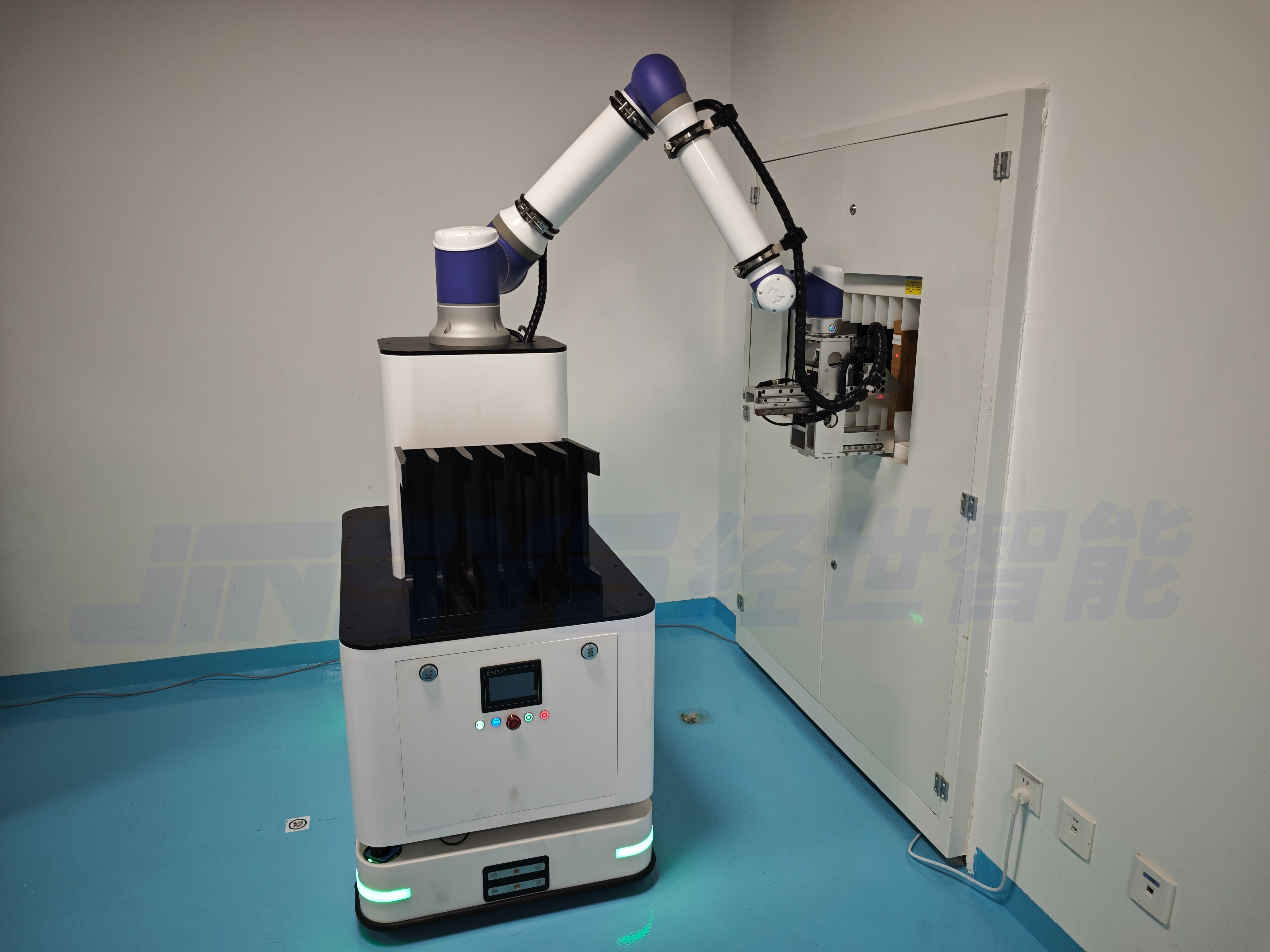
经世智能档案存取复合机器人:精准存取 建设无人化档案库房!
描述
经世智能档案存取复合机器人,通过技术创新,解决了传统档案管理的效率、精度与安全性痛点。
⚙️ 一、技术突破:高精度存取与智能调度
一体化控制
融合底盘导航、机械臂运动与视觉一体化控制算法,实现 ±0.5mm级精准抓取档案盒/卷宗,无需末端视觉相机二次定位,存取效率提升30%-50%。加密档案库房中精准取出指定档案,避免人工翻找导致的错漏。
车身姿态动态补偿技术
实时监测车身姿态(如地面不平或急停晃动),动态修正机械臂末端轨迹,保障密集档案架间的稳定操作。
智能调度与多机协同
TCS移动机器人调度系统:支持多台机器人协同作业,自动规划最优路径,避免库房通道拥堵。
二、应用场景:重塑档案管理全流程
传统方案:
档案存取 :人工查找耗时长,易错放
涉密档案管理:人员接触导致泄密风险
经世解决方案:
档案存取:机器人精准定位+抓取,30秒完成调档,效率↑40%,错误率↓90%
涉密档案管理:全流程无人化操作,操作日志可追溯,实现物理隔离防泄密
三、核心收益
降本增效
单台机器人替代2-3名档案管理员,人力成本降低50%;
7×24小时无人值守,紧急调档响应速度提升80%。
安全升级
零接触存取:避免档案污损、折角,保障珍贵文献完整性;
权限管控:操作日志自动归档,满足涉密单位审计要求。
柔性扩展
模块化设计:更换夹具即可适配卷宗、光盘、标本柜等不同载体;
快速部署:基于现有库房改造,快速上线运行。

✅ 四、适配单位类型
大型档案管理机构(档案馆、图书馆)→ 解决海量档案存取与盘点压力;
政企涉密部门(公检法、金融机构)→ 满足物理隔离与操作留痕需求;
高校/研究机构→ 实现珍贵文献无损化管理与高效共享。
经世智能档案存取机器人以 “精准、安全、可扩展” 为核心优势,为档案管理数字化升级提供全栈式解决方案。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
国产复合机器人品牌:经世智能,工业复合机器人硬核引领者2026-04-30 6852
-
赋能CNC加工:经世智能复合机器人,打造无人化生产车间2025-11-20 1827
-
智慧档案库房|经世智能复合机器人档案存取与转运解决方案2025-08-12 1337
-
档案库房温湿度调控系统功能说明2024-05-28 1313
-
档案库房环境监控系统2023-07-03 1512
-
海默机器人获近亿元档案管理机器人订单2022-12-05 1641
-
海默机器人助力金华档案馆实现无人化档案管理2022-11-24 2250
-
智能档案管理机器人|海默机器人档案管理实现无人化管理2022-10-09 2654
-
智能档案库房环境测控系统2021-10-14 3185
-
智慧数字化档案库房建设系统案例设计2021-05-28 1309
-
上位机软件之3D可视化智慧档案库房的应用【图片分享】2021-05-21 6017
-
温湿度记录仪在档案库房的温湿度调控方案中的应用2020-07-30 2205
-
什么是MP3的档案存取2010-01-30 602
全部0条评论

快来发表一下你的评论吧 !
