

UWB自动跟随技术原理、算法融合优化和踩坑实录
电子说
描述
1. 为什么要用UWB做自动跟随?
在做跟随型机器人之前,我们试过很多定位方法——GPS、蓝牙、Wi-Fi、纯视觉。但最终,UWB(Ultra Wideband,超宽带)成了最靠谱的那个。原因很现实:
- 室外定位精度能做到10cm级,室内也稳定;
- 多径干扰比蓝牙和Wi-Fi小得多;
- 对遮挡容忍度比纯视觉好;
- 延迟低,适合动态跟随。
举个例子,我们曾在一个仓库做过跟随机器人,GPS在室内直接报废,蓝牙RSSI飘得像彩票数字,视觉因为堆放的箱子而频繁丢目标。最后换成UWB,配上IMU和滤波算法,机器人终于能老老实实跟着人走,而不是去和货架谈人生。
2. 核心原理:测距 + 三边定位
UWB的核心思路是“先测出距离,再算出位置”,听起来简单,但每一步都能让工程师熬夜。
2.1 TOF(Time of Flight)飞行时间测距
原理很直白:信号从A到B要花多久,乘以光速,就能算出距离:
d=c⋅t
其中 c≈3×10^8 m/s
看似容易,但实际测试时会遇到几个坑:
- 时钟不同步 :标签和基站的时钟不一致会导致测距误差。
- 非视距(NLOS):信号绕路走,测出来的距离比真实的长。
我们曾经在一个金属棚下测试,结果距离全都比实际值多了1~2米,后来我们通过在固件中加入NLOS检测+滤波补偿才解决。
2.2 TDOA(Time Difference of Arrival)到达时间差定位
TDOA不要求标签和基站时钟同步,只要基站之间同步即可。核心公式: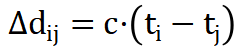
这表示标签到两个基站的距离差。配合多个基站,就能画出几条“双曲线”,交点就是目标位置。
三边定位的数学推导很像你在地图上用圆圈找朋友: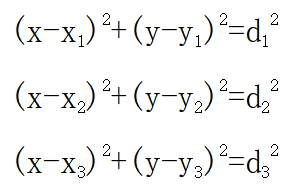
解这个方程组就能得到(x,y)坐标。
但在现实中,TDOA很容易被基站同步误差搞坏。有一次现场,工程师忘了给两个基站的时钟同步,结果机器人跟着人走着走着,突然往反方向跑,像是被什么东西吓到一样。
2.3 PDOA(Phase Difference of Arrival)相位差定位
PDOA利用载波相位差来测角度(AOA,Angle of Arrival),公式: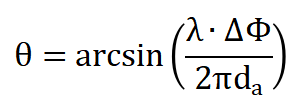
其中:
λ 是波长
Δϕ 是相位差
da 是天线间距
优势是方向分辨率高,缺点是对硬件一致性要求高。我们在做天线阵列测试时,哪怕两根射频走线长度差了 1mm,角度估计都能飘几度。
3. 算法融合与滤波优化
光有测距还不够,数据必须经过融合和滤波才能稳定跟随。
- 卡尔曼滤波 (Kalman Filter):适合高斯噪声环境,推算平滑轨迹
- 扩展卡尔曼滤波( EKF ) :非线性运动模型下更精准
- 粒子滤波 :适合多模态和强干扰环境
一次室内商场跟随测试中,直接用原始UWB坐标去控制机器人,结果走得像喝醉一样;换成EKF后,轨迹平稳了很多,客户都以为换了更贵的硬件。
4. 实际应用中的坑
- 人体遮挡 :信号被人挡住时,距离会跳变,需要用IMU推算补偿
- 金属反射 :在仓库、工厂尤其严重,必须做NLOS检测
- 多标签干扰 :多个机器人在同一区域时,要规划好时隙,避免碰撞
有一次我们做多机器人跟随演示,忘了配置时隙,结果三台机器人互相干扰,最后排成了一个“机器人广场舞”的阵型。
5. 总结
UWB自动跟随并不是一个“买个模块就能用”的简单技术,它是测距算法、几何定位、滤波优化和工程调试的综合产物。真正能在商用环境下稳定运行的方案,往往是在无数次现场调试、踩坑和优化中打磨出来的。
审核编辑 黄宇
- 相关推荐
- 热点推荐
- UWB
-
UWB高精度定位在自动驾驶中的应用前景2020-10-26 2885
-
UWB定位可以用在自动驾驶吗2020-11-18 3692
-
UWB技术前沿2021-07-26 2682
-
【动能世纪】基于UWB技术的DW1000芯片2021-08-30 1489
-
专访技术创业工程师吴才泽:感恩这些年踩过的坑2016-11-25 3789
-
UWB技术如何解决复杂场景下AGV的精准跟随难题?2025-10-22 1159
-
UWB 自动跟随系统技术原理与工程落地:为什么定位只是第一步?2026-05-23 810
-
自动跟随系统工程选型:UWB模组、传感器融合、底盘控制与安全策略怎么做取舍?2026-05-25 503
全部0条评论

快来发表一下你的评论吧 !
