

 有感方波驱动电机CW32L011电机驱动器开发板
有感方波驱动电机CW32L011电机驱动器开发板
电子说
1.4w人已加入
描述
位置检测
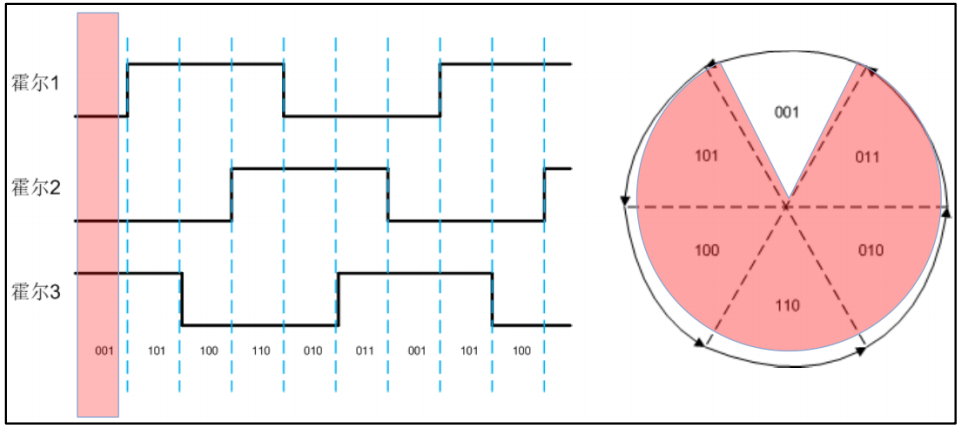
- BLDC电机内部安装3个霍尔传感器,分别对应三相绕组(A、B、C相)。
- 霍尔传感器利用霍尔效应检测转子永磁体的磁场变化,当转子旋转时,传感器输出高低电平信号(0或1),形成一个6步周期的编码序列(例如:101、100、110、010、011、001)。这些信号表示转子当前的位置和磁极方向。
编辑
换向控制
- 控制器(如MCU或专用芯片)接收霍尔信号,根据预设的换向表决定哪两相绕组通电(三相BLDC通常每次只通两相,第三相悬空)。
- 这会产生一个领先转子磁场90°的定子磁场,通过磁极吸引和排斥原理驱动转子连续旋转。
编辑
有感BLDC驱动的方法
硬件实现
- 驱动电路:采用三相全桥逆变器,由6个功率开关管(MOSFET或IGBT)组成,上桥臂和下桥臂各3个。每个相绕组连接在桥臂中点。
- 传感器安装:3个霍尔传感器均匀分布在定子上,间隔120°电角度(针对三相电机)。
- 控制器:使用微控制器(如STM32、PIC)或专用IC(如DRV8301)。控制器采集霍尔信号、电流反馈,并输出PWM信号控制开关管。
软件/控制方法
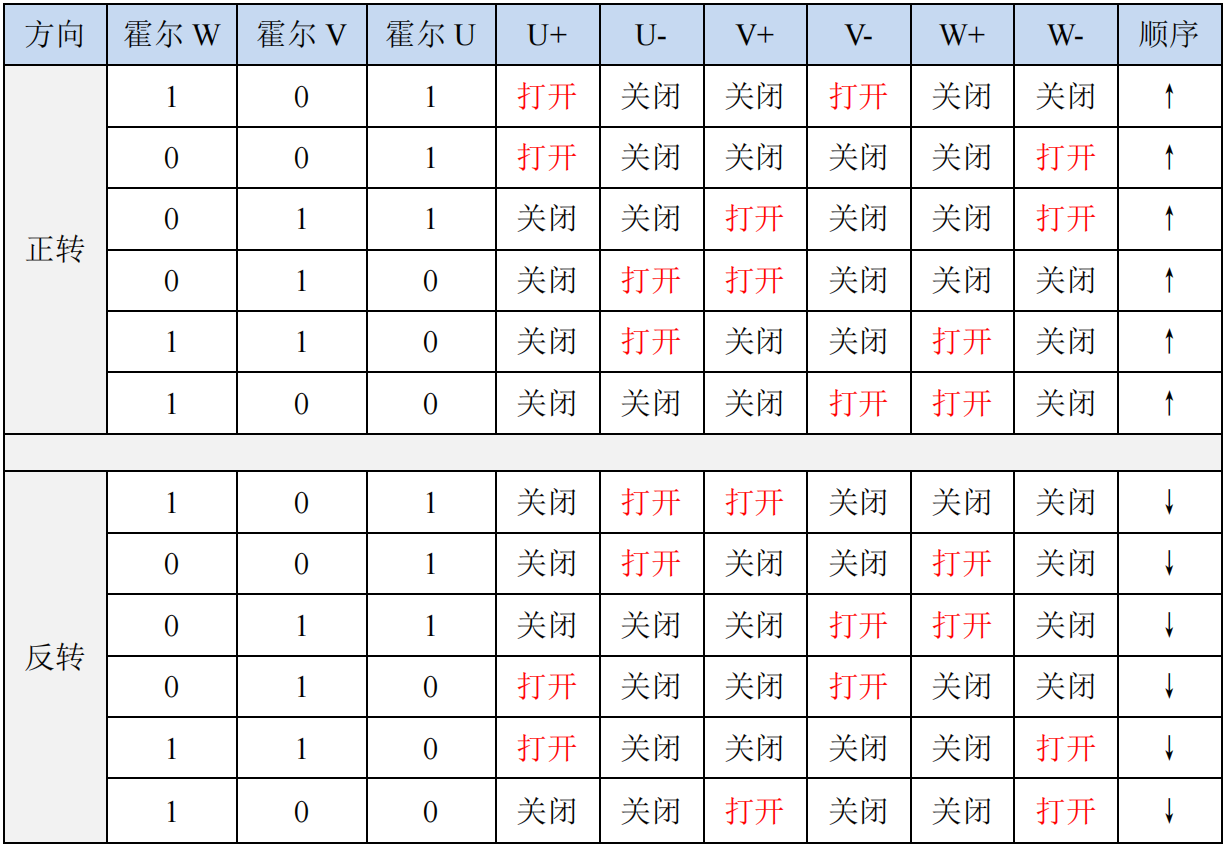
换向逻辑:基于霍尔信号的真值表进行换向。典型六步序列:
步骤 霍尔信号 (HA HB HC) 通电相 电流方向 1 101 A+ B- A → B 2 100 A+ C- A → C 3 110 B+ C- B → C 4 010 B+ A- B → A 5 011 C+ A- C → A 6 001 C+ B- C → B 每步对应60°电角度,转子旋转一圈(360°)完成6次换向。控制器通过中断或定时器响应霍尔信号变化,实现实时换向。
速度控制:使用PID算法实现闭环控制。
- 计算转速:通过霍尔信号周期测量转速(RPM = 60 / (极对数 × 信号周期))。
- PWM调速:调整占空比控制电压大小,从而调节转速。目标转速与实际转速差值输入PID,输出PWM duty cycle。
电流控制:监测相电流(通过电流传感器),防止过流。使用电流环PID保持电流稳定,提高效率。
启动与保护:启动时,先对齐转子位置(通电一相吸引转子),然后按序列驱动。添加过压、过流、堵转保护。
驱动总结
- 配置3个GPIO用于读取霍尔状态
- 配置一个高级定时器,并配置3个通道输出PWM波形,控制三相全桥逆变器上桥臂,再配置3个GPIO用于控制下桥臂。
- 在中断里读取霍尔状态,调用不同的驱动函数。
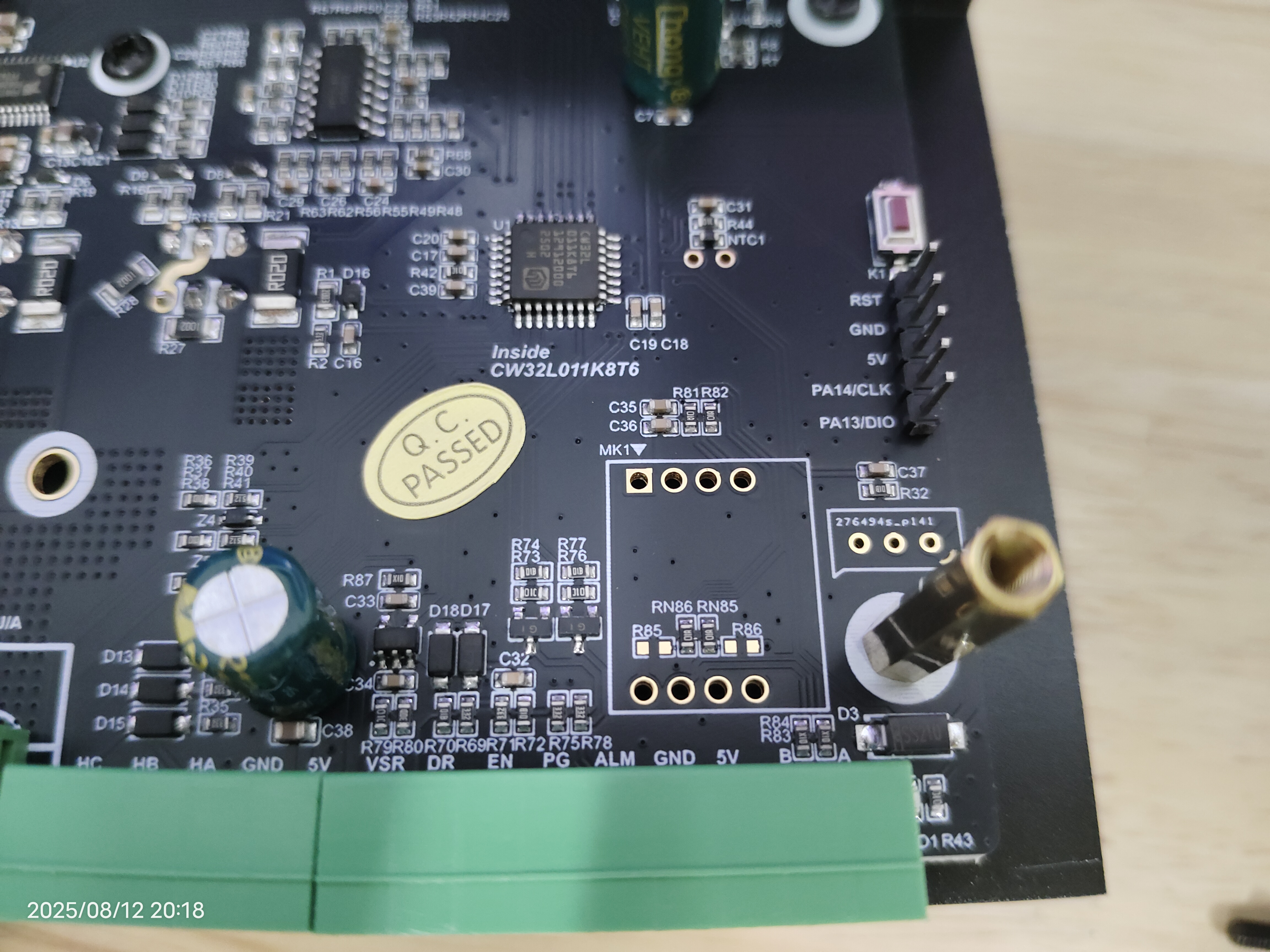
CW32L011电机驱动器开发板
电机驱动我用到了CW32L011的电机驱动器开发板。
这个项目在嘉立创上已经开源CW32L011_电机驱动器开发板
官方做的开发板用到了黑色沉金工艺,可以控制12~72V的电机,功率最高 800W。

编辑
可以看到外面用了金属外壳

编辑
编辑
布局也很漂亮

编辑
也做了一定的散热
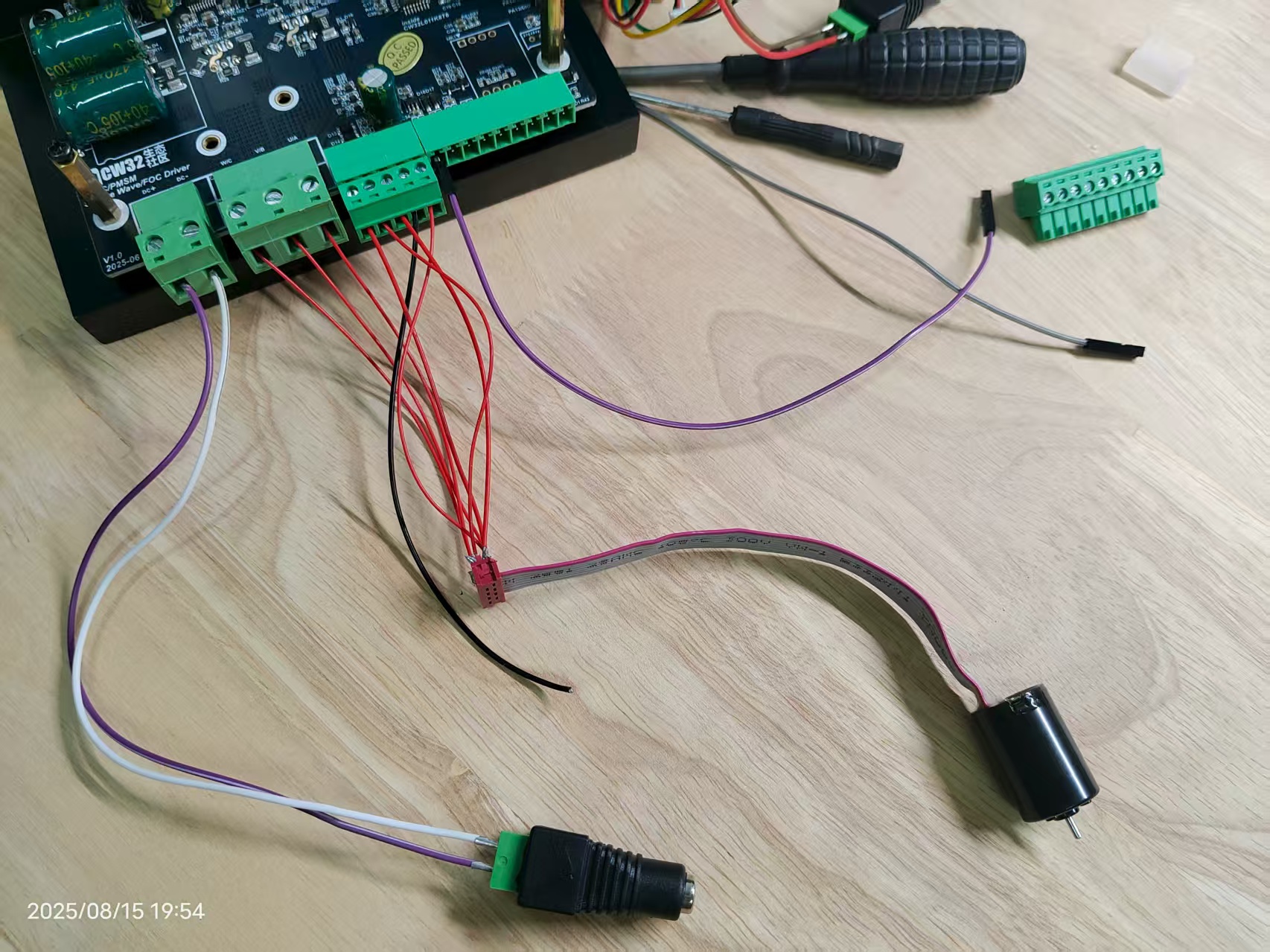
实操
我找了一个8块钱的小电机,用12V驱动
编辑
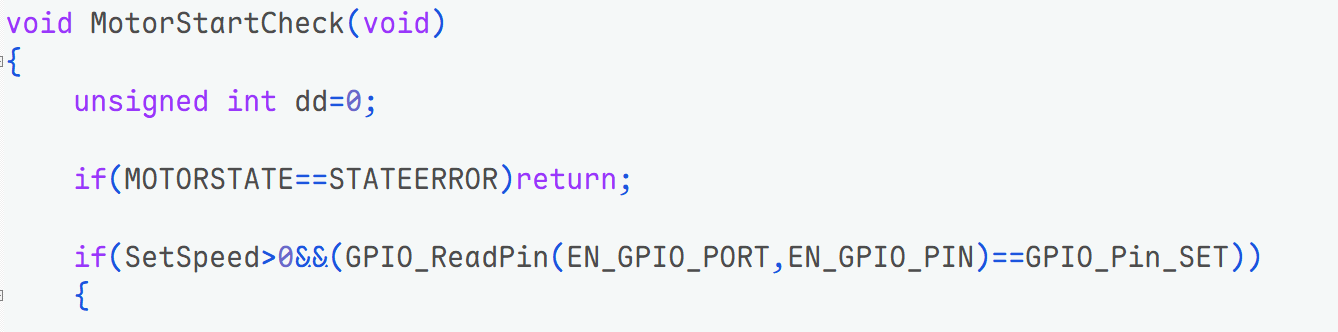
在使用官方例程的时候,在KEIL里读到了霍尔的位置,但苦恼就是不转动
编辑
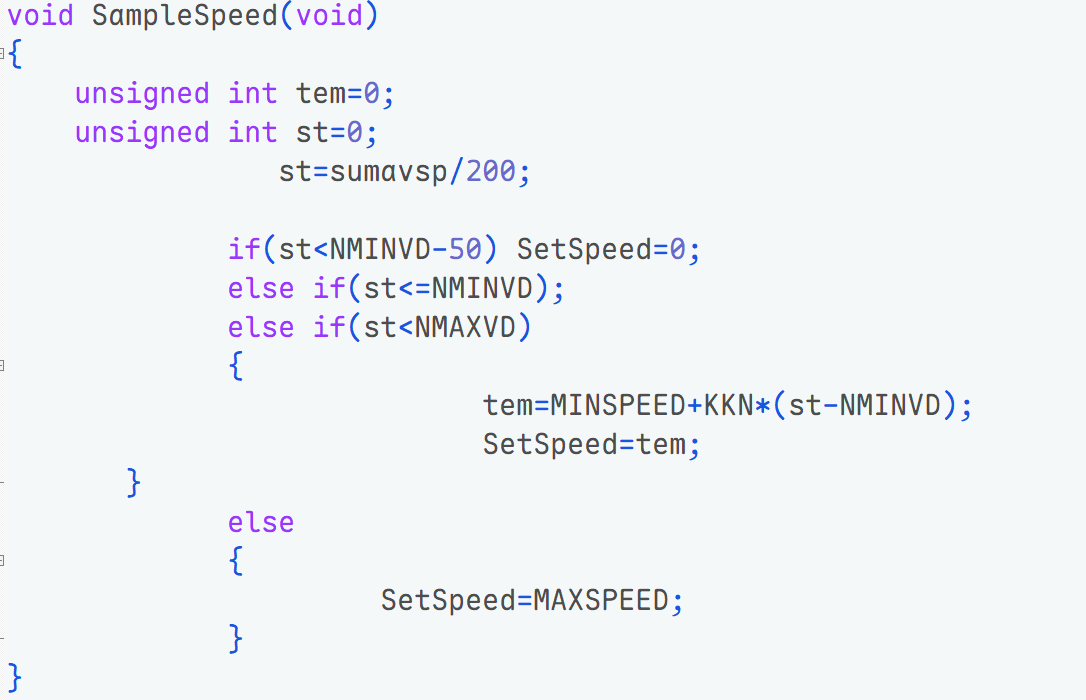
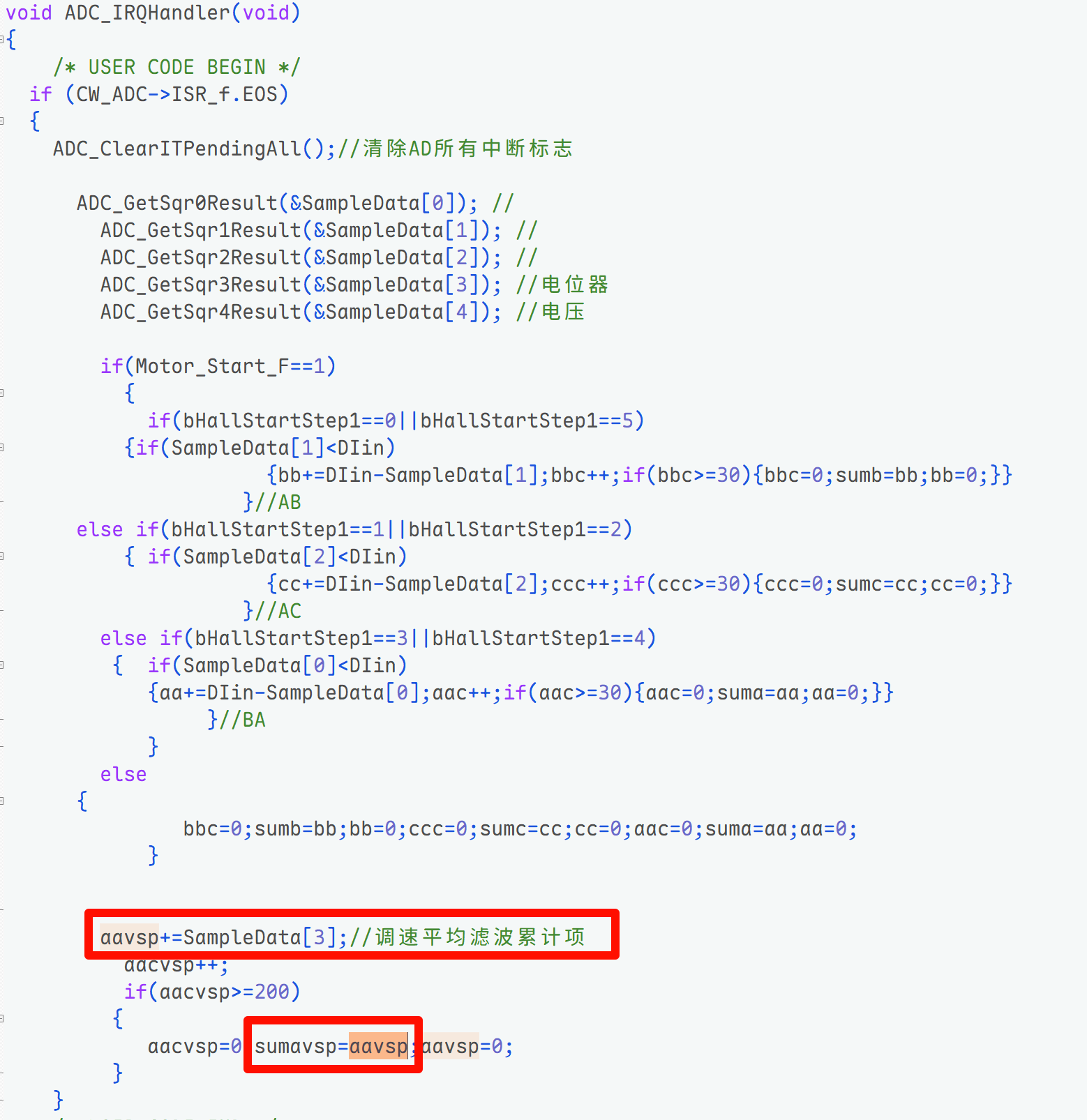
后来发现SetSpeed是读取了一个GPIO的电压值
编辑
编辑
最后用stlink给VE接上了3.3V,电机成功转动。

CW32L011_电机驱动器开发板驱动电机
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
CW32L011开发支持2025-11-17 204
-
CW32L011电机驱动器开发评估板测评2025-08-31 2325
-
CW32L011 电机驱动器开发板测试2025-08-30 1325
-
CW32L011电机驱动开发板——驱动无刷电机2025-08-22 1371
-
一起来玩转CW32L011无刷直流电机驱动开发板2025-08-21 3588
-
CW32L011电机开发板测评2025-08-20 22661
-
CW32L011无刷电机驱动测试2025-08-16 1713
-
CW32L011电机开发板控制教程2025-08-14 1156
-
CW32L011电机驱动控制开发板-软件2025-08-13 1282
-
CW32L011电机驱动电机控制开发板-硬件12025-08-12 4637
-
CW32L010 Motor Control Driver无刷电机驱动板上手体验2024-12-26 2256
-
基于CW32的无刷直流空心杯电机无感方波控制驱动方案2024-04-24 4505
全部0条评论

快来发表一下你的评论吧 !
