

AWStudio:轻松设置EtherCAT分布式时钟,提升同步精度!
描述
在EtherCAT系统中,确保各从站设备的时钟同步是实现精确控制的关键。本期我们将探讨AWStudio运动控制版如何通过分布式时钟同步机制,解决时钟不一致问题,提升系统的同步性能。
 EtherCAT系统中的时钟同步问题
EtherCAT系统中的时钟同步问题
EtherCAT 不使用分布式时钟,各从站依赖本地时钟独立运行,无统一时间基准,这会导致工业自动化场景的可靠性与控制精度降低,引发以下后果:
- 多设备动作不同步:例如多轴联动机床的多个电机、协同工作的机器人关节,会因时钟偏差出现动作延迟或错位,导致加工精度下降、设备卡顿甚至碰撞。
- 数据传输与采集误差大:从站上传的传感器数据(如位置、温度)会因时间戳混乱,导致主站计算(如速度、扭矩)出现误差,影响系统调控准确性。
- 通信抖动敏感,稳定性差:无分布式时钟的硬件校准机制,系统对通信抖动(如信号干扰、负载波动导致的传输延迟波动)容忍度会下降,影响系统整体的稳定性。
- 复杂拓扑场景无法适配:当 EtherCAT 网络包含多个从站、采用线型/树型等复杂拓扑时,各从站与主站的距离差异会导致传播延迟不一致。无分布式时钟的延迟补偿功能,会使远端从站与近端从站的时钟偏差呈累积效应,最终导致整个网络同步崩溃,无法满足多设备协同的需求。
为了精确控制从站设备何时接收输出数据和提供输入数据,确保数据传输的准确性和实时性,EtherCAT设备系统需要实现时间同步。引入分布式时钟(Distributed Clocks, DC)可以有效解决这一问题。
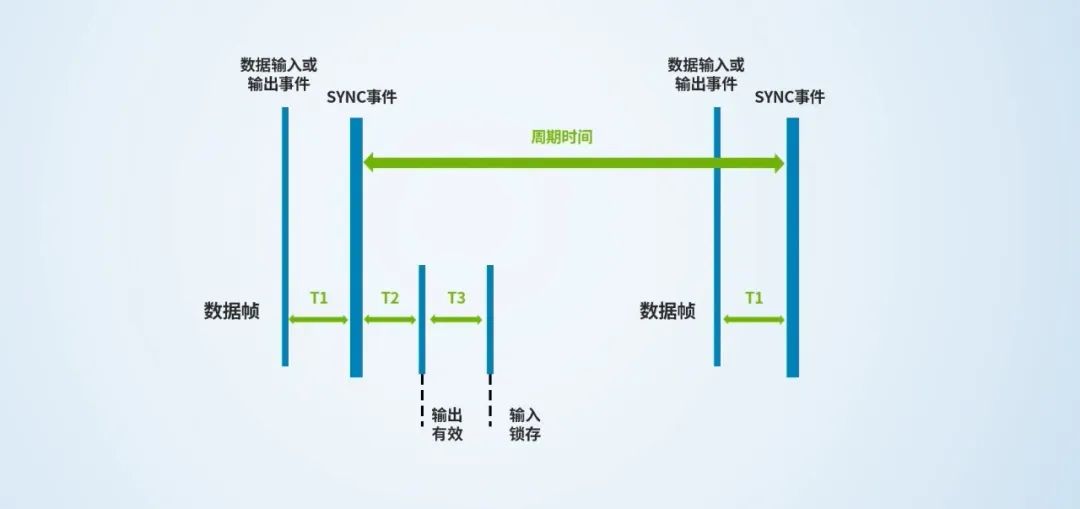
分布式时钟同步机制是一种高精度的时间同步模式。如图所示,数据帧在SYNC信号提前T1时间到达,从站在SYNC事件之前已经完成数据交换和控制计算。当接收SYNC信号后,立即执行输出操作,从而提高了同步性能。可以理解为,某个从站数据帧到达后不立即处理,因为有些从站可能还没接收到数据。通过等待一个指定的时间,所有从站可以一起处理数据,从而达到较好的同步效果。
AWStudio运动控制版的分布式时钟配置
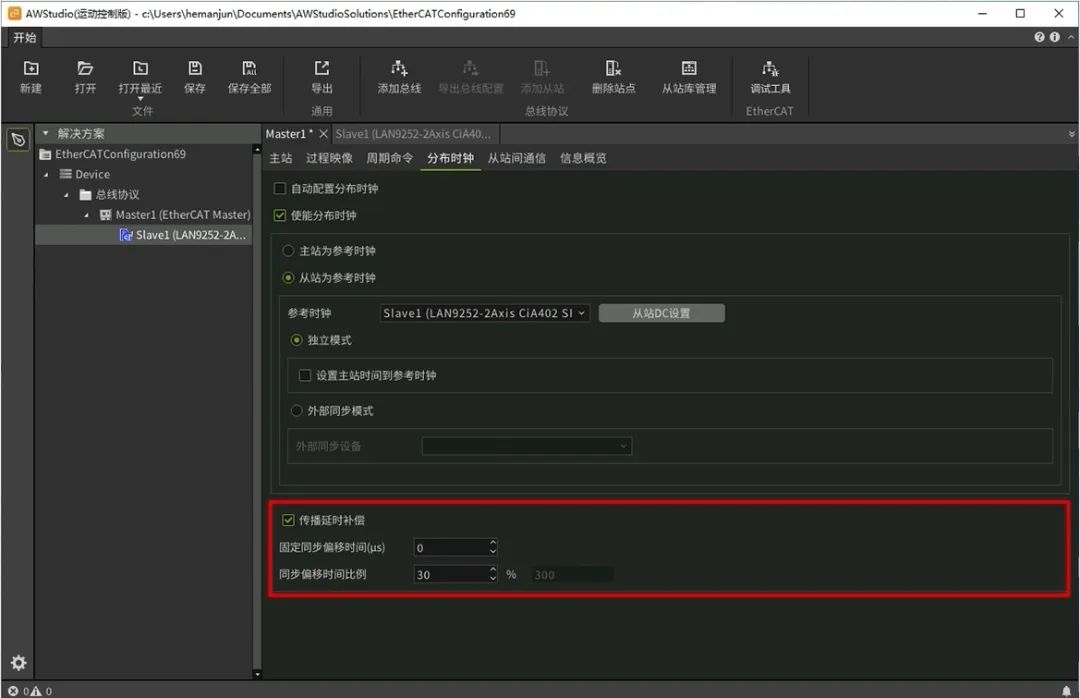
AWStudio运动控制版支持对分布式时钟进行详细配置,以确保整个网络中从站设备的精确同步。这对于需要高精度时间控制的应用场景尤为重要。
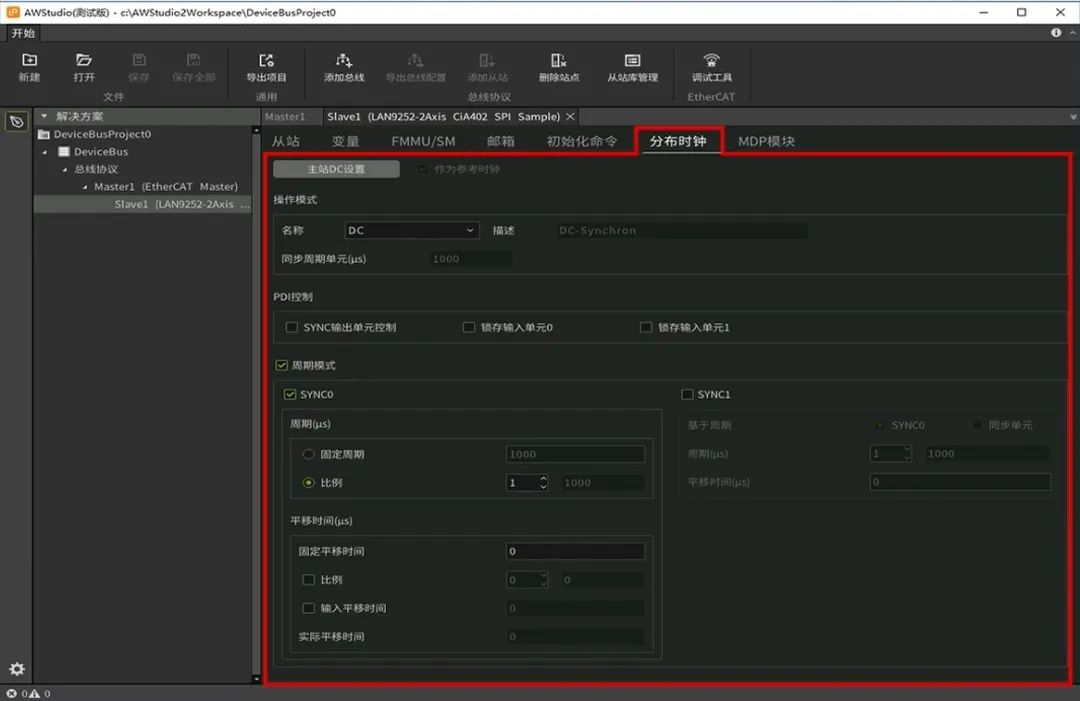
软件提供了同步偏移和漂移补偿的配置选项,帮助开发者根据实际情况调整时钟参数,以达到最佳的同步效果。
结语
通过分布式时钟同步机制,AWStudio运动控制版为EtherCAT系统提供了高精度的时间同步解决方案。无论是自动化生产线还是机器人控制系统,AWStudio都能确保从站设备的精确同步,提升系统的整体性能。如果您对AWStudio运动控制版的分布式时钟同步功能有任何疑问或建议,欢迎在评论区留言探讨。
-
【技术深挖】EtherCAT如何实现超高精度同步?深度解析分布式时钟 (DC)2026-05-21 190
-
AWStudio运动控制版:为EtherCAT配置带来全新体验2025-08-22 1156
-
基于ptp的分布式系统设计2024-12-29 1568
-
【技术分享】EtherCAT 分布式时钟简介2024-06-04 2501
-
如何才能同步分布式系统中的所有时钟?2023-02-06 2189
-
HDC2021技术分论坛:分布式软时钟有多重要?2021-11-09 2454
-
分布式系统时钟解决方案2021-06-28 2441
-
高精分布式时钟同步怎么实现?2019-11-01 3166
-
分布式数据采集系统中的时钟同步2017-12-01 1629
-
ARM-WinCE分布式系统平台的时钟同步设计2017-11-30 896
-
基于MAXII570的高精度同步时钟信号在分布式录波器中的实现2013-09-25 1131
-
基于IEEE1588协议的分布式系统时钟同步方法2010-12-30 1006
-
分布式软件系统2009-07-22 5451
-
分布式数据采集系统中的时钟同步2009-03-29 2325
全部0条评论

快来发表一下你的评论吧 !
