

明治科普 | 让机器人拥有"触感":电子皮肤如何实现?
描述
在打造更智能、更逼真的机器人道路上,“皮肤”正成为突破关键。相比传统刚性材料,具备柔性、伸展性与感知能力的“电子皮肤”正逐步走入主流视野。这类柔性传感器不仅具有柔性化、灵敏性、伸展性和柔韧性等特征,还能模拟人类的触觉与感知。
电子皮肤(E-skin):是一种能够模仿人类皮肤结构和感知功能的柔性电子系统。它不仅能让机器人“感受”到压力、温度、湿度、纹理等外界刺激,更能通过与人工智能等技术的深度融合,提升机器人的环境适应能力和智能交互水平。
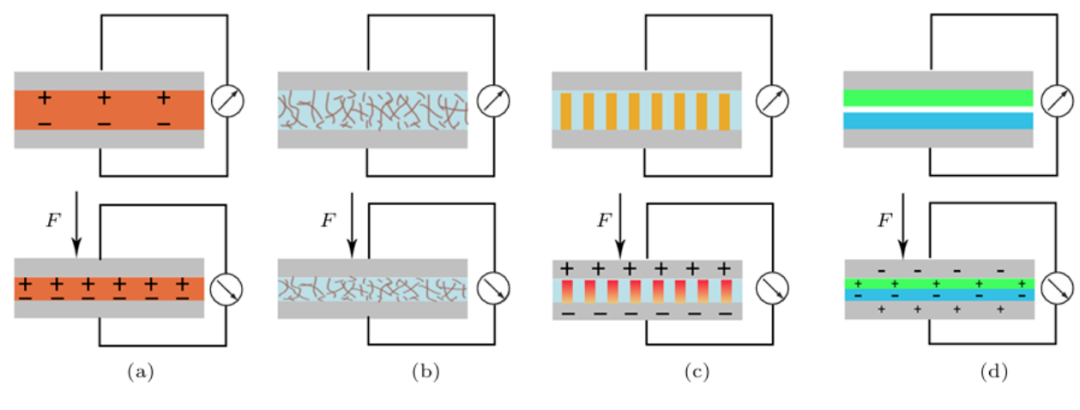
目前市面上主要有五大类触觉传感器类型,按原理分为压阻式、电容式、压电式、摩擦式,本期小明就来跟大家分享一下
压阻式电子皮肤
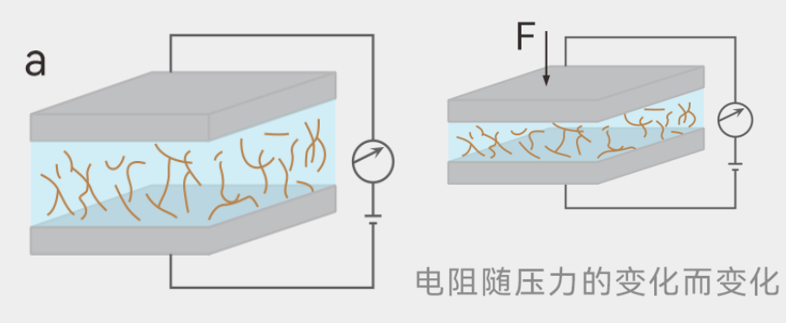
压阻式是最成熟、应用最广泛的技术路线之一,核心利用压阻效应,即材料受压力后电阻发生变化,从而实现触觉感知。
压阻式电子皮肤一般由 “柔性基底 + 压阻敏感层 + 电极” 组成,当灵巧手接触物体时,压力使压阻层发生形变,导致其内部导电通路的数量或接触面积变化,进而引起电阻值改变;通过检测电阻变化量,可反推压力大小和分布。
因为技术成熟、成本相对较低,可以满足一般的压力感知需求,在工业机器人领域已经实现广泛应用。
电容式电子皮肤
电容式是通过电容变化来实现触觉感知。柔性介质受压后极板间距或有效面积变化,引起电容值变化,可同时检测三维力。这种技术的特点是灵敏度较高,响应速度快,同时可以提供比电阻式更好的线性度。
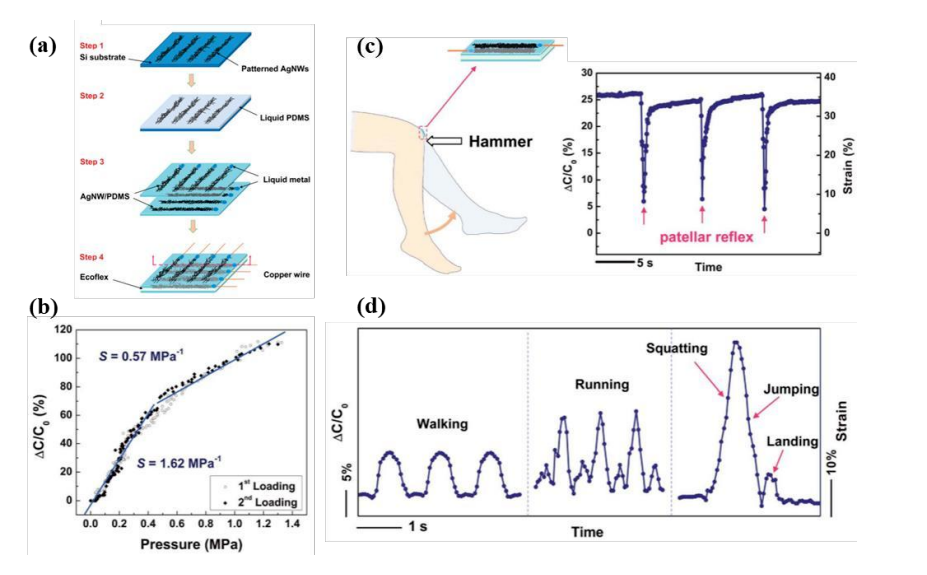
结构上,电容式触觉传感器一般是“柔性上下电极 + 介电层” 的平行板电容结构。当施加压力时,介电层被压缩,极板间距减小,使得电容增大,通过电容的变化可以推算出压力的大小。
由于灵敏度高,在一些高端的灵巧手上,需要检测微小压力的场景中会应用到电容式传感器
压电式电子皮肤
压电式是利用压电效应,即材料受机械应力时产生极化电荷,输出瞬态脉冲信号,反之受电场时产生形变的原理实现触觉感知,核心优势是无需外部电源即可实现动态力检测。当灵巧手接触物体时,压电材料受压力产生电荷,电荷经采集电路转换为电压信号,信号强度与压力大小成正比。
不过压电式有特殊的优势和缺点,在响应速度极快的同时,只能测动态/瞬态力,无法感知静态力。这是因为静态压力下电荷会随时间泄露,无法稳定检测,所以需要常与其他技术结合实现 “动静双模” 感知。
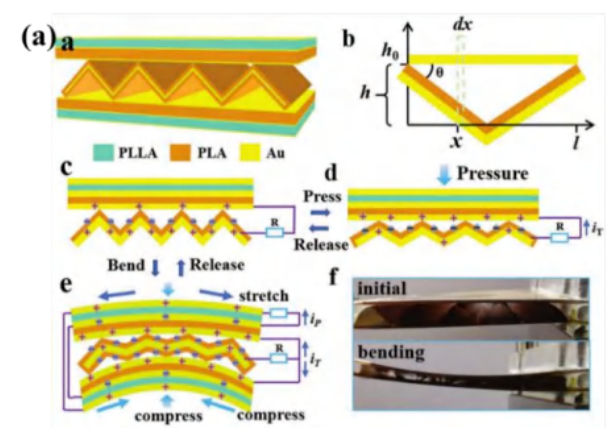
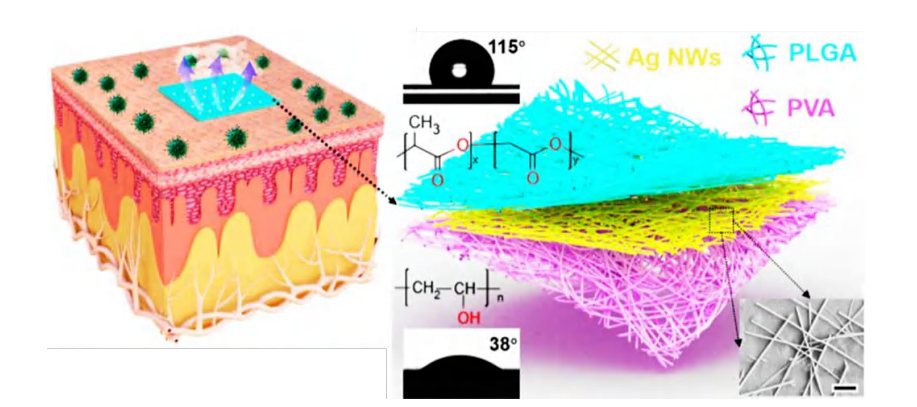
摩擦电式电子皮肤
摩擦电压力传感器,利用了摩擦起电的原理,具有成本低、制备流程简单和输出电压高的优点。它一般由上下两个电极和中间负责摩擦生电的不同材料构成,两层材料之间有一层薄薄的空气。
当外加压力时,两种不同带电序列的材料相互接触,摩擦起电现象发生,在接触界面两侧产生相反的电荷;当压力释放后,带等量相反电荷的两个表面被自动分离,由于静电感应现象分别在电极表面产生补偿电荷;材料之间的空气层使两个表面上的电荷不能完全中和, 形成电位差。这种机制使摩擦电型压力传感器可以在压力作用并释放后产生电信号。
SENSE EVERYTHING
四类原理对比
① 电容式压力传感器采用简洁的结构设计,具备静态力与动态力双模检测能力,具有低漂移特性,但易受外部电磁场干扰,且灵敏度受限于介电层的可压缩性。
② 电阻式压力传感器同样具备静态力与动态力检测能力,结构设计与电容式相当,但存在较明显的信号漂移现象,优势在于抗电磁干扰能力较强。
③ 压电式压力传感器以快速响应为特点,主要适用于动态力检测场景,其突出优势在于无需外部电源即可实现自供电。
④ 摩擦电式压力传感器专注于动态力检测,具有制造成本低廉、结构简单、输出电压高及自驱动特性等多重优势。
从应用场景看,电容式与电阻式传感器适用范围较广,但在恶劣环境下需定期更换电源,维护成本较高。相比之下,压电式与摩擦电式传感器凭借自供电特性,可实现长期野外无人值守监测,显著降低运维成本。
-
"STM32F0 Error: Flash Download failed - ""Cortex-M0""解决"2021-12-01 5666
-
低压空气断路器World Super AE V Series" 喜获 "2021 R&D 100 Awards2022-02-10 1912
-
如何区分Java中的&和&&2023-02-24 3740
-
芯片工艺的"7nm" 、"5nm"到底指什么?2023-07-28 13546
-
R&S携手Skylo Technologies增强非地面网络(NTN)测试服务2023-10-20 1760
-
科沃斯扫地机器人通过TÜV莱茵"防缠绕"和"高效边角清洁"认证2024-03-17 1931
-
FS201资料(pcb & DEMO & 原理图)2024-07-16 557
-
电缆局部放电在线监测:守护电网安全的"黑科技"2025-04-14 1229
-
人形机器人为什么要定制? ——揭秘工业场景的"千面需求"2025-06-10 1723
-
为什么GNSS/INS组合被誉为导航界的"黄金搭档"?2025-07-09 1343
-
机械臂越复杂越"卡顿"?别让控制器拖了后腿2026-02-02 941
-
从"替代人力"到"智能协同":履带式巡检机器人的产业跃迁2026-02-05 577
-
科义机器人:让工业巡检从"人海战术"转向"智能时代"2026-03-09 239
-
AR-1106 技术深探:打破声源定位 "不可能三角" 的工程化创新 摘要2026-05-23 144
-
Type-C浪潮席卷小家电:SINK芯片如何成为快充高压的"心脏"2026-05-25 289
全部0条评论

快来发表一下你的评论吧 !
