

深入芯驰D9360核间通信案例,RPMSG关键技术深度剖析
描述
前言:
在多核异构架构成为工业SoC主流方案的当下,芯驰D9360凭借其Cortex-A55与Cortex-R5的协同设计,在需同时处理复杂应用与实时任务的场景中表现突出。本文将以眺望电子Core-D9360平台为例,详解如何利用RPMSG与VirtIO机制实现A核与R核间的可靠通信,并提供关键代码实现与调试方法。
图 1 Core-D9360 核心板
一、通信基础:RPMSG框架
RPMSG(Remote Processor Messaging)是Linux内核中用于处理器间通信的框架,采用virtio + rpmsg + IPCC三层架构实现:
●virtio:提供虚拟化队列管理
●rpmsg:实现消息封装与路由
●IPCC:硬件中断控制器
在Core-D9360核心板中,A55核运行Linux,R5核运行RTOS,两者通过虚拟通道(VirtIO ring buffer)进行数据传输,支持双向、异步、多通道通信。
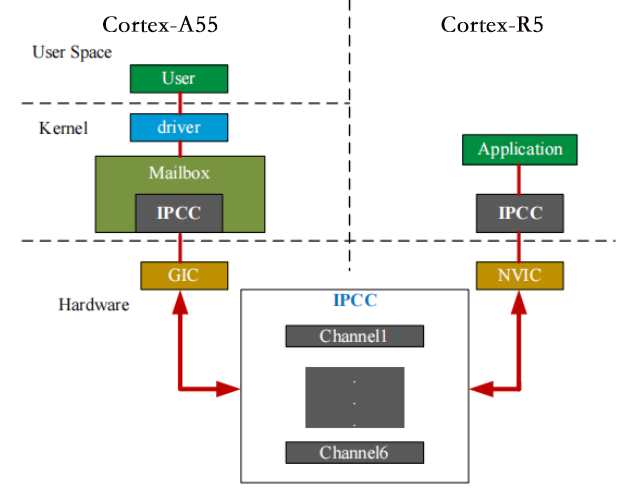
图 2 核间通讯架构
二、核心代码实现
2.1 添加例程驱动
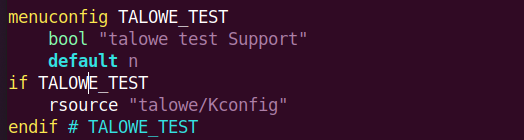
RTOS系统的例程添加在SDK/source/ssdk/examples/kunlun/drivers下,分别创建Kconfig和rules.mk文件,其中Kconfig文件内容如下:

rules.mk文件内容如下:

返回上一层目录下,在Kconfig下添加talowe驱动模块的初始状态和图形界面类型,添加内容如下:
在rules.mk文件下,添加如下内容:

MODULES += $(LOCAL_DIR)/talowe: 如果配置选项 CONFIG_TALOWE_TEST为 "y",则会将$(LOCAL_DIR)/talowe添加到变量MODULES中。当启用了"talowe test"功能时,会将$(LOCAL_DIR)/talowe模块添加到模块列表中。
2.2 R5核发送机制实现
将rpmsg目录下的rpmsg_test.c文件复制到talowe.c文件中,该驱动描述如何通过RPMSG协议进行核间通信。我们可以在此程序基础上加入自己的协议。
以下是R5核发送"Talowe:RtoA"字符串到A55核,并打印出接收到的信息的函数。
void send_receive_string(rpmsg_channel_t channel, const char *message) {int max_payload;struct dcf_ccm_hdr *snd_pkg;struct dcf_ccm_hdr *rcv_pkg;status_t ret;
max_payload = rpmsg_channel_max_payload(channel);snd_pkg = osAlloc(max_payload);rcv_pkg = osAlloc(max_payload);ASSERT(snd_pkg && rcv_pkg);
memset(snd_pkg, 0x0, max_payload);memset(rcv_pkg, 0x0, max_payload);
snd_pkg->dmsg.msg_type = COMM_MSG_CCM_ECHO;snd_pkg->dmsg.opflags |= DCF_MSGF_TMS;snd_pkg->dmsg.msg_len = sizeof(struct dcf_ccm_hdr) - sizeof(struct dcf_message);
strncpy(snd_pkg->data, message, max_payload - sizeof(struct dcf_ccm_hdr));
ret = rpmsg_channel_send(channel, RPMSG_ECHO_EPT_ADDR, snd_pkg, max_payload, 3000);if (ret == RPMSG_SUCCESS) {printf("Sent: %s\n", message);} else {printf("Failed to send message\n");}int received_len;ret = rpmsg_channel_recv(channel, rcv_pkg, max_payload, &received_len, 3000);if (ret == RPMSG_SUCCESS) {printf("Received: %s\n", rcv_pkg->data);} else {printf("Failed to receive message\n");}osFree(snd_pkg);osFree(rcv_pkg);}
将以上函数添加至talowe.c文件内,并在主函数rpmsg_test编写调用该函数条件,如下:
const char* message_to_send = "Talowe:RtoA";
static int rpmsg_test(int argc, char *argv[]){ int test_case = -1; int type, rproc, times; ...... else if (!strcmp(argv[0], "perf")) { test_case = 3; type = atoi(argv[1]); rproc = atoi(argv[2]); times = atoi(argv[3]); } else if(!strcmp(argv[0], "send")) {test_case = 4;type = atoi(argv[1]);rproc = atoi(argv[2]);times = atoi(argv[3]); } else { printf("Unknown cmd %s\n", argv[0]); goto exit; } ...... ...... case 3: do_rpmsg_perf_test(channel, times); break;
case 4: send_receive_string(channel, message_to_send);break;
default: printf("Unknown case %d\n", test_case); break; }
加入串口打印提示:
static void rpmsg_test_show(void){ printf("\nList rpmsg communicate with remote:\n"); printf("\tType\t\t\tRemote-Proc\n"); ...... ...... printf("\trpmsg_test perf \n"); printf("\trpmsg_test send \n");
printf("\ne.g: test ping rpmsg.virtio 10 times with secure, use command:\n"); printf("\trpmsg_test ping 0 1 10\n");}
编辑如下文件:
SDK/source/ssdk/ middleware/rpmsg_service/rpmsg_echo.c
static int echo_channel_cb(void *data, int len, unsigned long src, void *arg){ rpmsg_channel_t chan = arg; struct dcf_ccm_hdr *ccm_pkg = data;const char *char_data = (char *)data; int ret = 0;
if (ccm_pkg->dmsg.msg_type == COMM_MSG_CCM_ECHO) { ccm_pkg->time[2] = timer_get_current_time(g_syscnt_timer) * g_sdrv_syscnt_dev.cnt_per_us; ret = rpmsg_channel_send(chan, src, data, len, 1000); printf("Sending data (length %d): ", len);for (int i = 8; i < len; i++) {printf("%c ", char_data[i]);}printf("\n"); } else if (ccm_pkg->dmsg.msg_type == COMM_MSG_CCM_ACK) { ret = rpmsg_channel_send(chan, src, (char *)"ACK", 4, 1000); ssdk_printf(SSDK_INFO,"send ACK\n"); } else { ssdk_printf(SSDK_WARNING, "echo_channel_cb: unknown %d bytes from addr %ld\n", len, src); }
if (ret != 0) { ssdk_printf(SSDK_WARNING, "echo_channel_cb: channel send failed\n"); }
return ret;}
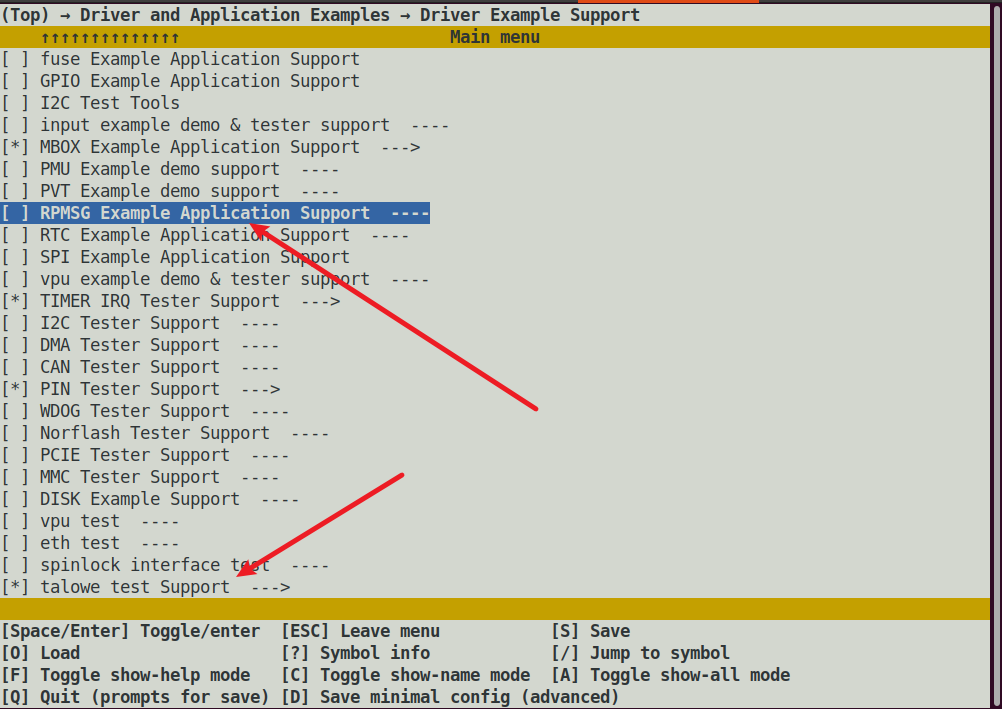
通过以下指令打开图形化配置界面,进入到Driver and Application Examples->Driver Example Support下,可以看到我们新加的talowe test Support驱动配置选项,需要关闭 RPMSG Example Application Support 选项,如下:
./tools/menuconfig.sh -b d9360_ref -p ref -c secure
2.3 A55核发送数据到R5核
A55核Linux系统通过echo_test命令与R5核进行通讯,以下是该命令源码的文件位置:

自定义一个发送和接收字符串的函数,如下:
int send_receive_string(int fd, const char *send_str,int ntimes, int seconds) {int i = 0, j = 0;int size, bytes_rcvd, bytes_sent;long elapse = 0;err_cnt = 0;i_payload = (struct _payload *)malloc(sizeof(struct _payload) + payload_max_size);r_payload = (struct _payload *)malloc(sizeof(struct _payload) + payload_max_size);if (i_payload == 0 || r_payload == 0) {printf("ERROR: Failed to allocate memory for payload.\n");return -1;}if (seconds)gettimeofday(&start_test, NULL);
i_payload->magic = 0xA5;for (j = 0; j < ntimes; j++) {i_payload->num = i;i_payload->size = size;strcpy(i_payload->data, send_str);if (verbose) printf("\r\n sending payload number");if (verbose) printf(" %d of size %lu\r\n", i_payload->num, (sizeof(struct _payload)) + strlen(i_payload->data));bytes_sent = write(fd, i_payload, sizeof(struct _payload) + strlen(i_payload->data));if (bytes_sent <= 0) {if (verbose) {perror("\r\n Error sending data\n");break;} elsefprintf(stderr, "#");err_cnt++;continue;}printf("send string:%s\n",i_payload->data);r_payload->num = 0;bytes_rcvd = read(fd, r_payload, sizeof(struct _payload) + payload_max_size);while (bytes_rcvd <= 0) {usleep(10000);bytes_rcvd = read(fd, r_payload, sizeof(struct _payload) + payload_max_size);}r_payload->data[bytes_rcvd] = '\0';printf("receive string:%s\n",r_payload->data);
if (interval)sleep(interval);}free(i_payload);free(r_payload);return 0;}
在main函数内添加新增函数条件,执行指令时实现A55核发送"Talowe:AtoR"字符串到R5核:
int main(int argc, char *argv[]){ int opt; char *rpmsg_dev = RPMSG_DEVICE_NAME; ...... int test_second = 0; int send_char = 0; char *value_c;
if (strstr(argv[0], "property")) { do_property_test(argc, argv); return 0; }...... while ((opt = getopt(argc, argv, "anhiS")) != -1) { switch (opt) { ...... case 'v': verbose = 1; break;
case 'c':send_char = 1;break;
case 'b': benchmark = 1; break; ...... default: printf("getopt return unsupported option: -%c\n", opt); usage("echo_test"); break; } } else if (benchmark == 2) { iperf_test(fd, ntimes); } else if (benchmark == 3) {
throughput_test(fd, ntimes, test_second);
} else if( send_char == 1){const char *message_to_send = "Talowe:AtoR";int result = send_receive_string(fd, message_to_send,ntimes, test_second);if (result < 0) {printf("Error sending/receiving string.\n");} } else { if (test_second) { ntimes = 0x7fffffff; }...... return 0;}
在打印列表添加如下提示:
static void usage(const char *cmd){printf("This is s rpmsg echo test %s, MTU=%d\n", ECHO_TEST_VERSION, rpmsg_payload_test);...... printf("%s -v\t\t: Verbose mode\n", cmd); printf("%s -c [char]\t: send Talowe:AtoR\n", cmd); ...... printf("echo_test -d soc:ipcc@0.ipcc-echo.-1.30 -x -t 10 ; Throughput test in average (Ack'd) in 10 seconds (print in 1 second)\n");
exit(0);}
编辑如下文件:
SDK/source/linux/drivers/rpmsg/virtio_rpmsg_bus.c
static int rpmsg_echo_cb(struct rpmsg_device *rpdev, void *data, int len, void *priv, u32 src){struct dcf_message *msg = data;struct virtproc_info *vrp = priv;......switch (msg->msg_type) {case COMM_MSG_CCM_ECHO:dev_err(dev,"virtio send susses");/* Add timestamp in the time[2] */......break;case COMM_MSG_CCM_ACK:dev_err(dev,"rpmsg recv ACK");err = __send_offchannel_raw(vrp, RPMSG_ECHO_ADDR, src, "ACK", 4, true);......break;default:/* No more action, just drop the packet */break;}return 0;}
编辑如下文件:
SDK/source/linux/drivers/rpmsg/semidrive_ipcc.c
static int rpmsg_ipcc_echo_cb(struct rpmsg_device *rpdev, void *data, int len, void *priv, u32 src){struct rpmsg_ipcc_device *vrp = priv;struct device *dev = vrp->dev;......switch (dmsg->msg_type) {case COMM_MSG_CCM_ECHO:dev_err(dev,"ipcc send susses");/* Add timestamp in the time[2] */ ......break;case COMM_MSG_CCM_ACK:dev_err(dev,"ipcc recv ACK");err = __send_offchannel_raw(vrp, RPMSG_ECHO_ADDR, src, "ACK", 4,true); ......break;default:/* No more action, just drop the packet */break;}return 0;}
内核需打开以下配置:
CONFIG_RPMSG=yCONFIG_RPMSG_CHAR=yCONFIG_RPMSG_VIRTIO=yCONFIG_RPMSG_SEMIDRIVE=y
三、烧写测试验证
3.1 R5核向A55核发送信息
以下测试内容为R5核发送"Talowe:RtoA"字符串到A55核,A55核接收到字符串之后重新发送给R5核。
R5核:
rpmsg_test send 0 3 1

A55核:

3.2 A55核向R5发送信息
以下测试内容为A55核发送"Talowe:AtoR"字符串到R5核,R5核接收到字符串之后重新发送给A55核。
A55核:
echo_test -d virtio0.rpmsg-echo.-1.30 -c 1

R5核:

四、结语
通过RPMsg在单芯片上实现了这种高效的核间通信机制,使得异构多核SoC能够真正发挥"实时控制+高性能计算"的协同优势,成为工业4.0、自动驾驶、AIoT等领域的核心技术底座。
广州眺望电子科技有限公司推出Core-D9360核心板与EVM-D9载板外,还提供完整的SDK、编译指南、测试手册及技术文档,覆盖从环境搭建、代码编译、镜像烧写到功能验证的全流程,助力开发者快速实现产品化。
-
【米尔-芯驰D9360商显板试用评测】2、配置QT开发环境2024-04-01 4083
-
【米尔-芯驰D9360商显板试用评测】3、LED闪起来2024-04-02 4579
-
【米尔-芯驰D9360商显板试用评测】成功解决QCamera的模块调用,并编写简单的查找摄像头程序2024-04-07 4464
-
【米尔-芯驰D9360商显板试用评测】米尔-芯驰D9360商显板开发环境搭建2024-04-09 3348
-
【米尔-芯驰D9360商显板试用评测】使用ffmpeg实现远程视频监控2024-04-11 4142
-
智能通信终端有哪些关键技术?2021-05-26 2396
-
核间通信(IPC)解决方案2022-11-03 2024
-
米尔-芯驰D9360商显板-国产六核CPU开发板2024-01-09 982
-
米尔-芯驰D9360商显板开发环境搭建2024-04-10 2267
-
异构R5实时系统开发笔记-基于芯驰D93602024-06-13 1992
-
不一样的芯驰D9核心板,眺望电子D9360核心板设计全解析2025-09-05 1480
全部0条评论

快来发表一下你的评论吧 !
