

什么是“Blockdrop”?立体视觉应用的神经形态技术
电子说
描述
尽管有众多人工智能(AI)处理器竞相抢市──每一种都自称是“突破”──今日的AI社群仍被无数问题所困扰,包括能量、速度、AI硬件的尺寸与AI算法,这些都尚未证实在强韧度以及性能方面有所改善。
在计算机视觉方面,如IBM Research的计算机视觉与多媒体研究经理Rogerio Feris所言,最大的挑战在于如何“让视觉分析更有效率”。要特别说明的是,AI仍在早期发展阶段,需要全新的想法、长期性的眼光,以及学界与研究机构在研发上的更多投入。
IBM Research会在本周于盐湖城(Salt Lake City)举行的2018年度计算机视觉与图形识别研讨会(Conference on Computer Vision and Pattern Recognition,CVPR)上,发表两篇关于AI软件与硬件技术的论文;CVPR是由计算机视觉基金会(Computer Vision Foundation)以及IEEE计算机学会赞助,号称是最具竞争力的计算机视觉技术研讨会之一。
在AI硬件部分,IBM Research正在推广一种立体视觉(stereo-vision)系统,是透过将以大脑启发的棘波神经网络(spiking neural-network)技术应用于数据撷取(传感器)与数据处理所开发;该设计利用了IBM自家的TureNorth芯片──是一种非冯诺伊曼(non-von-Neumann)架构处理器──以及一对瑞士业者iniLabs开发的事件导向(event-driven)摄影机
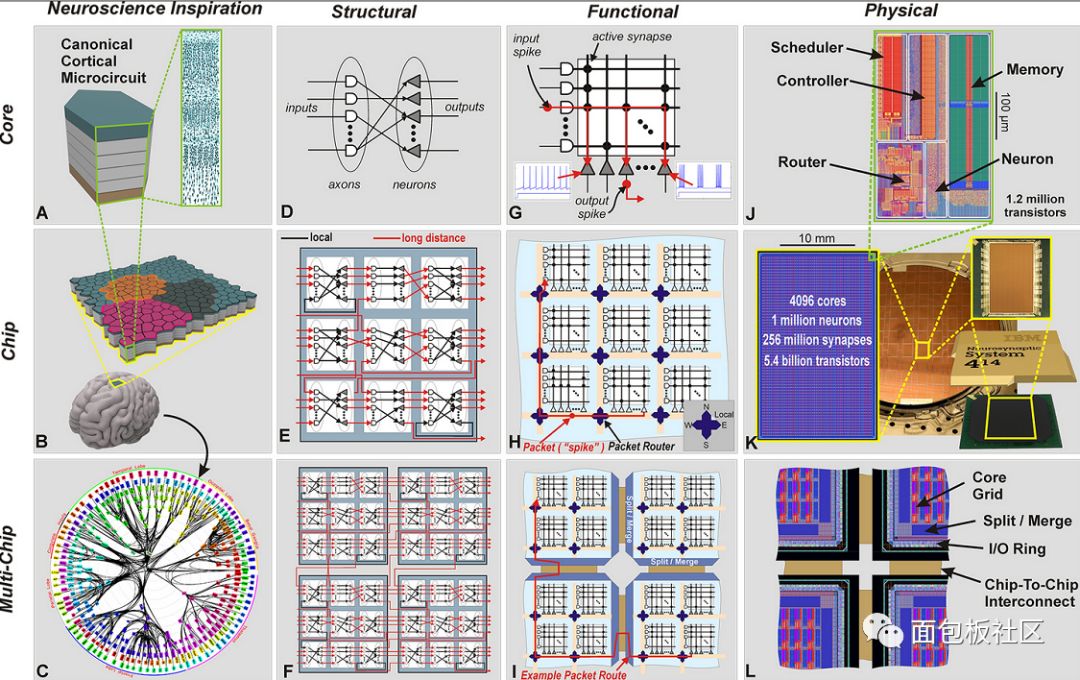
IBM的TrueNorth架构
在AI软件部分,IBM Research的论文是关于“Blockdrop”,也就是被认为可降低深度残差网络(deep residual networks)所需之总运算量的关键步骤。Feris解释,以上两篇论文是从两个不同角度解决一个相同的问题──视觉分析效率。
Feris表示,当有人要过马路,自动驾驶车辆会被预期要做出“实时推论”;虽然影像辨识准确度很重要,不过自驾车要花多少时间产生结论、识别出那是什么东西,才是它在现实世界应用的终极试验。
什么是“Blockdrop”?
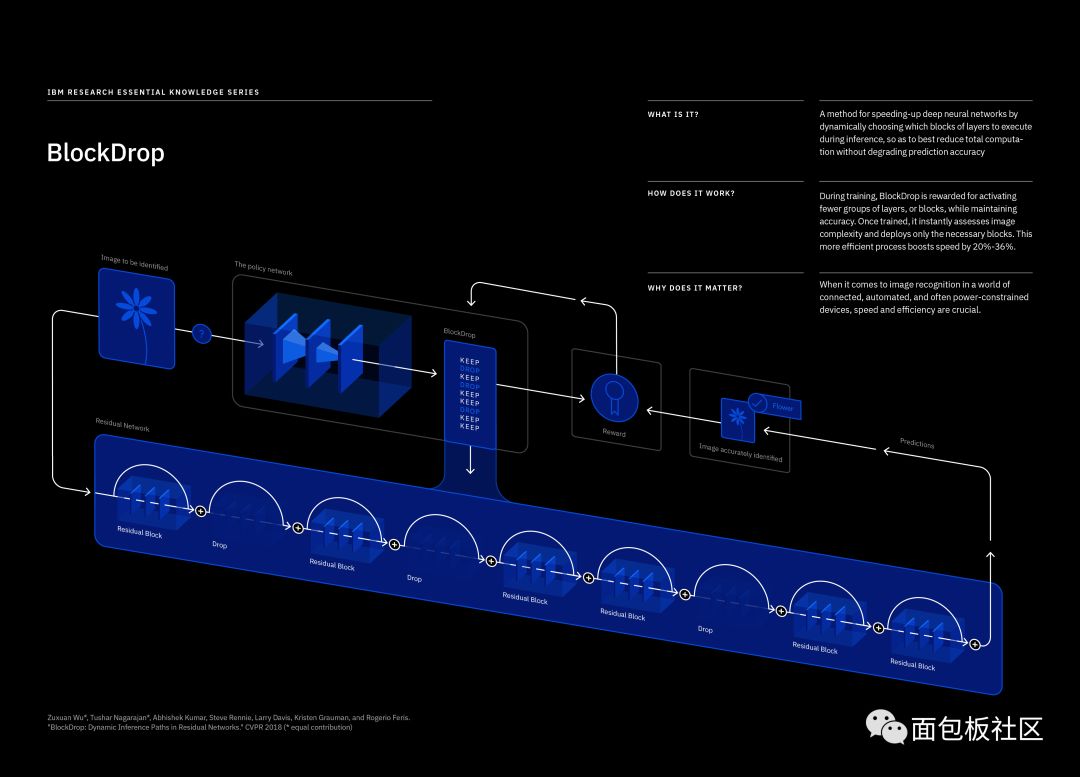
在2015年ImageNet大会上成为赢家的残差网络,在计算机视觉技术社群掀起了一场风暴;该技术已经证明了它能提供优异的识别结果,因为能训练神经网络中的数百甚至数千层。不过Feris指出:“将残差网络需要的那些一体适用运算应用于所有成像,会太没有效率;”他解释,如果有一只狗在白色背景前,会比在忙碌都市街景中更容易被识别。
为此IBM Research开发了BlockDrop,这是一种学习动态选择残差网络中哪些区块(包括多个层)来执行推论任务的方法;Feris指出:“该方法的目标是妥善减少整体运算辆,同时不损失预测准确度。”
BlockDrop说明
IBM声称,BlockDrop在测试中平均能将识别速度提升20%,有时甚至能加快36%,而且不牺牲残差网络在ImagNet数据集中达到的准确度。Feris表示,IBM这项研究是在2017年夏天与美国德州大学(University of Texas)、马里兰大学(University of Maryland)合作展开,该公司将会把BlockDrop释出给开放源码社群。
立体视觉应用的神经形态技术
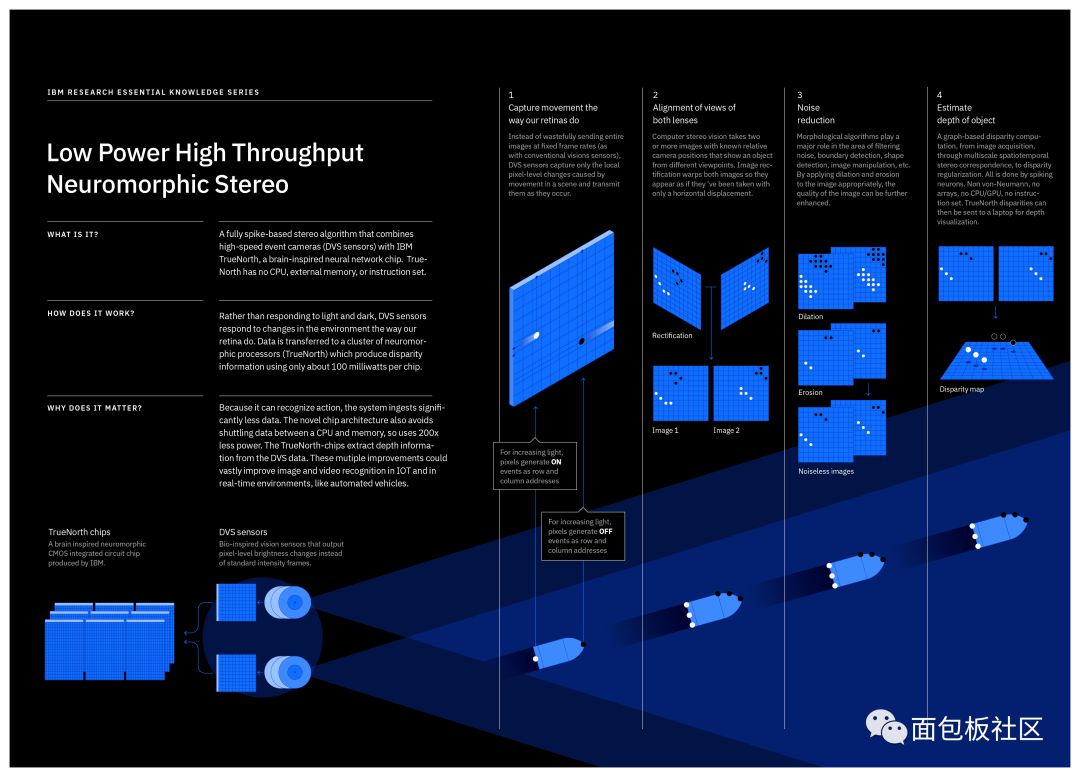
在硬件方面,IBM Research瞄准了一种利用棘波神经网络的立体视觉系统;该公司表示,目前产业界是使用两个传统(讯框)摄影机来产生立体视觉,但从未有人尝试过神经形态技术。虽然以传统摄影机提供立体影像并非不可能,不过会需要高画质影像信号处理,例如高动态范围(HDR)成像、超高分辨率处理以及自动校准等。
根据IBM研究员Alexander Andreopoulos在论文中的描述,其系统是利用两个iniLabs开发的事件导向摄影机(又被称为动态视觉传感器-DVSe),撷取画面之后以IBM TrueNorth芯片丛集来提取快速移动物体之深度。
IBM的目标是大幅降低取得立体影像所需的功耗与延迟,在接收直播的棘波输入(这已经大幅降低数据量)后,该系统是用IBM的神经形态硬件重建3D影像,透过估算来自两个DVSe之影像的差异,以及藉由三角测量定位3D空间中的物体。
神经形态立体影像
数据撷取与处理
有一家法国新创公司Prophesee是利用神经形态技术来撷取数据,并降低传感器所收集的资料量;该公司的传感器技术并非以讯框为基础,而是以简化并打造适合机器使用的数据为设计目标。Prophesee首席执行官先前接受EE Times采访时表示,这能大幅减轻数据量负担,应该也能因此让车子能做出几乎实时性的决策。
不过新一代的IBM立体视觉系统不只将类人脑技术用于数据撷取,也用在数据处理上,以重建立体影像;Andreopoulos表示,该系统还有一个最大的成就,是透过编程让TrueNorth有效率地执行「棘波神经网络立体视觉必备的各种常见子程序(sub-routines)」。IBM补充指出,TrueNorth芯片的架构功耗比传统系统低,这会有利于自动驾驶系统的设计。
同样的,利用一对DVS摄影机(非讯框式)也能降低数据量与功耗,并提升速度、减少延迟,提供更好的动态范围,而IBM表示这些都是实时系统设计的关键元素。在被问到新的TrueNorth系统还有那些优势时,Andreopoulos表示,与采用传统CPU/GPU处理器或FPGA的最先进系统相较,其每像素视差图功率(power per pixel disparity map)有两百倍的改善。
利用以事件为基础的输入,馈入IBM系统的实时影像数据,是以9颗TrueNorth芯片进行处理,每秒能计算400张视差图,延迟仅11毫秒(ms)。IBM在论文中指出,藉由特定的权衡(trade-offs),该系统能将速率进一步提升到每秒2,000张视差图。
采用TrueNorth芯片的立体视觉系统何时可以商业化?Andreopoulos表示:“我们还不能透露时间点,只能说我们已经进行测试并且成功编程芯片有效处理视差图,现阶段是概念验证。”
-
立体视觉系统的设计方案2023-11-06 379
-
关于双目立体视觉的三大基本算法及发展现状2023-08-25 3227
-
Netduino上的立体视觉2022-11-08 661
-
双目立体视觉的定义与理解2022-10-31 4702
-
双目立体视觉在嵌入式中有何应用2021-12-23 1771
-
使用双目立体视觉实现CCD测距系统设计的资料说明2019-11-26 1239
-
双相机立体视觉和结构光立体视觉原理及优势对比2019-05-14 8809
-
LABVIEW能做双目立体视觉吗2018-01-13 9988
-
图像处理基本算法-立体视觉2017-11-17 5966
-
双目立体视觉的运用2016-03-03 5382
-
基于立体视觉的变形测量2015-09-21 4568
-
双目立体视觉原理大揭秘(一)2013-11-21 3206
-
立体视觉技术分析2012-04-28 664
-
基于HALCON的双目立体视觉系统实现2011-04-08 1846
全部0条评论

快来发表一下你的评论吧 !
