

睿擎混合部署方案:基于QT的电机驱动系统开发|技术集结
描述
一、 方案核心概述
本方案旨在解决系统开发中 “高性能实时控制” 与 “丰富人机交互” 的需求矛盾。它采用 混合部署 的架构,将系统清晰地分为两个层面:
1. 实时层 :部署在 睿擎派 设备的 RT-Thread 实时系统中,负责执行高频率、高确定性的核心控制算法、EtherCAT 等工业总线通信、故障保护等硬实时任务。
2. 交互层 :基于 Qt Framework 开发,运行在 Linux 操作系统上,提供图形化用户界面,用于参数配置、状态监控、曲线显示、数据记录、报警管理和网络通信等软实时或非实时任务。
两个层面通过 高速通信机制 进行数据交换和指令传递,从而形成一个兼顾实时性能与开发效率的完整解决方案。
二.睿擎派运行混合部署方案
混合部署双系统指的是单一芯片上同时运行两个系统,既运行Linux ,又运行RT-Thread系统。
睿擎派RC3506上运行Linux系统日志图通过串口1查看

睿擎派RC3506上运行RT-Thread系统日志图通过串口3查看

三.Linux 侧 QT应用界面开发
1. 基于 QT设计器进行 UI设计

2. QT 界面绘制及业务逻辑核心代码

主要是绘制电机启停按钮,电机运行方向按钮,电机期望位置和当前位置字体实现

主要是绘制电机当前位置和期望位置双曲线实现
四. RT-Thread侧EtherCAT 驱动电机应用开发
1. 创建示例工程
在RuiChing Studio IDE中 创建11_amp_qt_ethercat_master
示例工程:

2. EtherCAT核心代码
EtherCAT主站的初始化配置回调

process_data_config_handler主要是EtherCAT主站的初始化配置回调,在这个函数中,通常要对DC时钟进行配置以及PDO过程数据的映射配置,在本例子主要是对伺服电机的模式,目标位置,目标速度,当前状态,当前速度,当前位置等PDO进行映射配置。
EtherCAT主站运行时周期循环过程数据更新回调

ecat_process_data_begin_handler主要是EtherCAT主站运行时周期循环过程数据更新回调,在这个函数中,主要进行电机模式状态切换处理以及对电机的位置进行增量,实现正转、反转、停止等操作。
五. 双系统通信,实现完整功能
rpmsg是一种用于Linux与RT-Thread操作系统之间进行多核异构通信的机制,进行两个系统间读写通信。
1 Linux侧rpmsg端点

创建打开Linux侧/dev/rpmsg字符设备节点,初始化电机ctrl_data结构体成员值

Linux MASTER端地址是0x1001,RT-Thread远端地址是0x3001

Linux侧将电机的启动停止,运行方向和电机位置控制值通过send_msg接口实际是write接口将ctrl_data结构体写入RT-Thread侧。
2. RT-Thread侧rpmsg端点
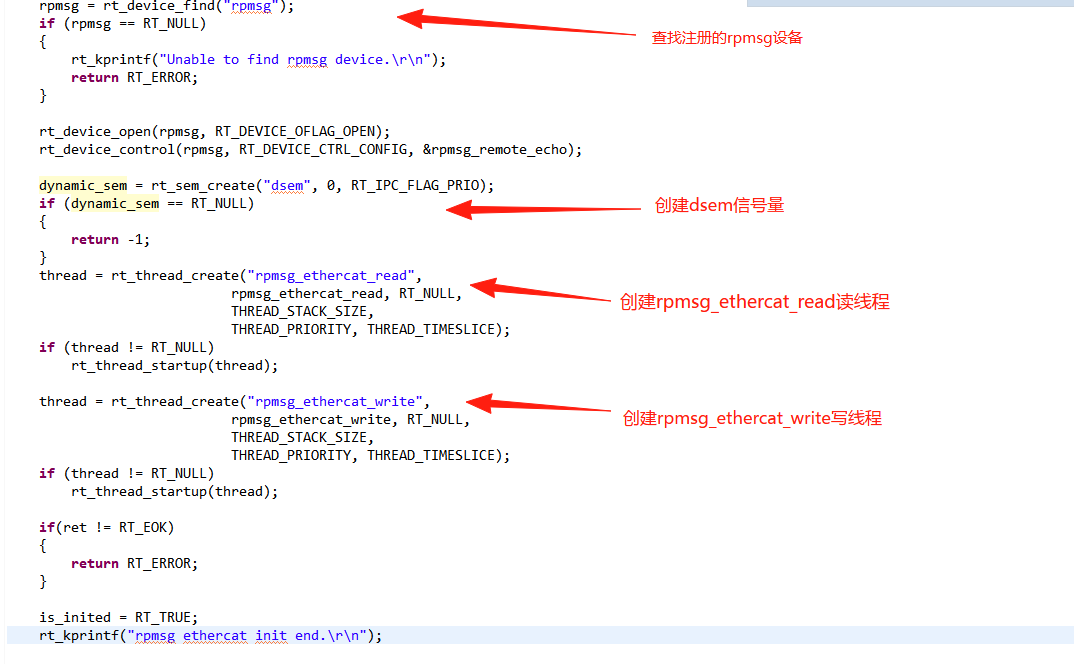
创建打开RT-Thread侧/dev/rpmsg字符设备节点,创建两个rpmsg读写线程

RT-Thread源地址是0x3001,Linux目的地址是0x1001
RT-Thread侧 rpmsg读线程

rpmsg读线程里RT-Thread源端的电机控制值,电机运行状态,电机运行方向赋值给 ctrl_data结构体中
RT-Thread侧 rpmsg写线程

rpmsg写线程会不断的获取dynamic_sem信号量,这个信号量会在每次改变电机控制偏移值,改变电机运行状态,改变电机运行方向都会去释放,一旦获取到信号量就会通过rt_device_write接口将ctrl_data结构体写入到Linux目的端。
六. 实战演示
硬件准备
● 睿擎工业开发平台支持板卡1块(睿擎派RC3506)
● 配套7寸MIPI屏
● EtherCAT伺服驱动器一套(推荐力川LC10E-400W)
● 串口调试器、jlink调试各一套
硬件连接
睿擎派RC3506用异面排线和7寸MIPI屏幕连接,再用网线将伺服驱动器IN口与开发板ETH1网口连接,伺服电机的电源线和编码器线分别接入电源口和CN3连接口。如图所示:

编译示例工程
RuiChing Studio IDE对 11_amp_qt_ethercat_master工程进行编译:

下载运行程序
连接jlink调试器,使用IDE下载app.img进去后,电机驱动系统显示效果如下视频:
七. 总结
从硬件连接到界面控制,睿擎平台让实现 混合部署QT电机驱动系统变得简单。示例只是一个起点,基于此,你可以轻松扩展功能,实现更复杂的数控机床CNC系统与运动控制平台,医疗器械的手术机器人等工业应用。
-
基于睿擎派轻松玩转CANopen电机控制2025-07-19 6194
-
睿擎UVC-AI方案:基于YOLO的人脸检测系统开发|技术集结2025-09-25 10074
-
睿擎平台网络开发指南:从IP配置到远程控制 | 技术解析2025-10-22 6737
-
睿擎派文件系统指南:从开发到发布全流程实践 | 技术解析2025-11-05 8477
-
基于睿擎派的工业FOC无刷电机控制系统与WEB推流监看系统| 技术集结2025-11-26 3598
-
睿擎平台核间通讯实践:QT与电机控制的无缝集成2026-02-25 6874
-
川商传媒:睿擎工业开发平台开启智能化新篇章 | 媒体视角2025-04-30 1140
-
睿擎平台极简开发重要实践—— PinMux 配置工具 | 睿擎派试用名单公示2025-06-11 1792
-
明晚8点|睿擎文件系统实战:从开发到发布全流程解析2025-11-11 905
-
睿擎平台v1.7.2版本正式发布|技术集结2025-12-17 909
-
直播预告 | 睿擎平台AMP混合部署:你的Qt界面如何“指挥”底层电机?2026-02-27 482
-
直播 | 睿擎平台AMP混合部署:你的Qt界面如何“指挥”底层电机?2026-03-03 698
-
直播预告 | 睿擎派3506 Ubuntu开发实战:从环境搭建到整包固件制作,一次讲透2026-03-13 1853
-
直播预告 | 睿擎派 3562 NullClaw 系统开发实战:把 AI 助手塞进工业开发板2026-03-30 465
-
免费试用|睿擎派开发板等你来测:提交高质量报告,开发板免费送2026-04-17 271
全部0条评论

快来发表一下你的评论吧 !
