

RK3506开发板Xenomai内核RT-Linux实时性系统适配教程与性能实测,实测仅7μs稳定延时
描述
本文基于触觉智能RK3506核心板/开发板,介绍Xenomai内核RT-Linux实时性系统适配,并附性能实测。

Xenomai简介与实测数据
- Xenomai简介
XEnomai是一个实时子系统,可与Linux内核紧密集成,为应用程序提供可预测的响应时间。它采用双内核架构,一个轻量级的辅助内核与Linux内核在同一硬件上并行运行。广泛应用于实时性要求的工业应用场景,如工业PLC、运动控制器、精密制造、机器人控制、工业控制智能化、能源监控/DTU等。
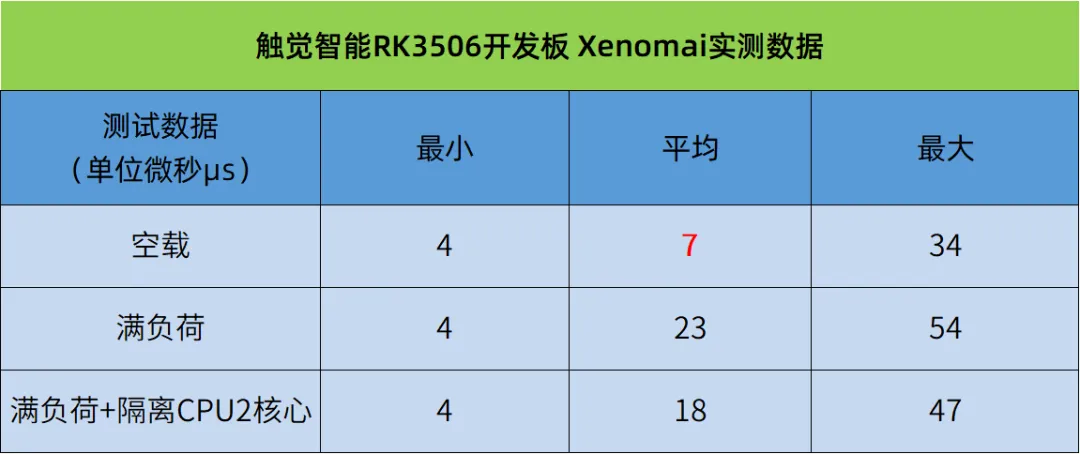
- RK3506实测数据
最优数据为空载数据,平均延时仅为7μs!
Xenomai适配与测试方法
- 打入补丁
基于触觉智能RK3506网盘提供的Xenomai资料,分别在Buildroot、Kernel、U-boot、Rkbin、Deconfig打入补丁。

- 编译Buildroot与Kernel内核
编译buildroot,需要注意若之前有编译过buildroot,需删除之前的编译输出,命令如下:
rm buildroot/output/ -rf
执行以下命令编译Buildroot,命令如下:
./build.sh buildroot
编译Xenomai内核Kernel,命令如下:
cd kernel-6.1/ ../buildroot/output/rockchip_rk3506_xenomai/build/xenomai-v3.2.4/scripts/prepare-kernel.sh --arch=arm
如需隔离CPU,EMMC修改如下设备树ido-evb3506-v1a-emmc.dtsi (NAND版本修改设备树:ido-evb3506-v1a-nand.dtsi)
chosen { bootargs = "earlycon=uart8250,mmio32,0xff0a0000 console=ttyFIQ0 root=PARTUUID=614e0000-0000-4b53-8000-1d28000054a9 rw rootfstype=ext4 rootwait snd_aloop.index=7 isolcpus=2"; };
执行以下命令,退回主目录编译内核,命令如下:
cd ../ ./build.sh kernel
- 编译镜像并烧录
编译update.img镜像,命令如下:
./build.sh
测试方法
- 测试配置
测试时关闭UI界面,避免影响实时性,命令如下:
killall rk_demo
并CPU调度模式改为Performance,命令如下:
echo performance > /sys/devices/system/cpu/cpufreq/policy0/scaling_governor
校准,命令如下:
echo 0 > /proc/xenomai/latency
- CPU空载测试
命令如下:
/usr/demo/cyclictest -m -a -p 99 -t 3 -i 1000
- CPU满负荷测试
命令如下:
stress --cpu 3 --io 2 --vm 1 --vm-bytes 4M --timeout 1000000s & /usr/demo/cyclictest -m -a -p 99 -t 3 -i 1000
- 满负荷-隔离CPU3核心测试
压力、隔离CPU测试(注:需确保前面已修改设备树隔离CPU):
(1)确认CPU2已隔离
root@rk3506-buildroot:/# cat /proc/cmdline earlycon=uart8250,mmio32,0xff0a0000 console=ttyFIQ0 root=PARTUUID=614e0000-0000-4b53-8000-1d28000054a9 rw rootfstype=ext4 rootwait snd_aloop.index=7 isolcpus=2 user_debug=31
(2)测试命令
stress --cpu 3 --io 2 --vm 1 --vm-bytes 4M --timeout 1000000s & taskset -c 2 /usr/demo/cyclictest -m -a -p 99 -t 1 -i 1000
产品简介
触觉智能RK3506开发板/核心板
,搭载瑞芯微RK3506B/RK3506J低功耗多核异构处理器(3核A7@1.5Ghz+M0,满载0.65W),双CAN FD、双网口、6路串口,最高支持-40℃~85℃严苛环境,百元内国产化方案助力工控、IoT与智能设备高效升级!
-
迅为RK3506开发板瑞芯微多核异构linux系统LVGL应用手册2026-06-01 1188
-
资源受限下HMI2秒启动系统,米尔RK3506开发板×LVGL Demo演示2026-04-24 325
-
米尔RK3506核心板SDK重磅升级,解锁三核A7实时控制新架构2025-12-19 807
-
触觉智能RK3506星闪开发板测评报告(下)2025-12-11 1709
-
RK3588核心板/开发板RT-Linux系统实时性及硬件中断延迟测试2025-11-28 1274
-
【米尔RK3506国产开发板评测】3、实时补丁以及EtherCAT IGH移植2025-10-27 2974
-
瑞芯微RK35XX系列Linux实时性详细测试对比( PREEMPT_RT和Xenomai )2025-09-30 2301
-
RK3506开发板Linux开发板极致性价比之选2025-09-11 4192
-
【米尔NXP i.MX 91开发板评测】移植和运行RT-Linux,实时性能测试2025-09-01 1345
-
瑞芯微RK3506开发板必备攻略之Qt应用开发手册(下),触觉智能工控嵌入式方案商2025-06-19 1748
-
米尔瑞芯微多核异构低功耗RK3506核心板重磅发布2025-05-16 5619
-
瑞芯微RK3506开发板Ethercat主站适配开发详细攻略,实测微秒级抖动延迟!2025-05-09 2172
-
触觉智能RK3506核心板,工业应用之RK3506 RT-Linux实时性测试2025-04-27 2460
-
实时系统Preempt RT与Xenomai之争!谁更主流,谁更实时?2023-06-15 1471
全部0条评论

快来发表一下你的评论吧 !
