

开疆智能Profinet转ModbusTCP网关连接艾力特机器人配置案例
描述
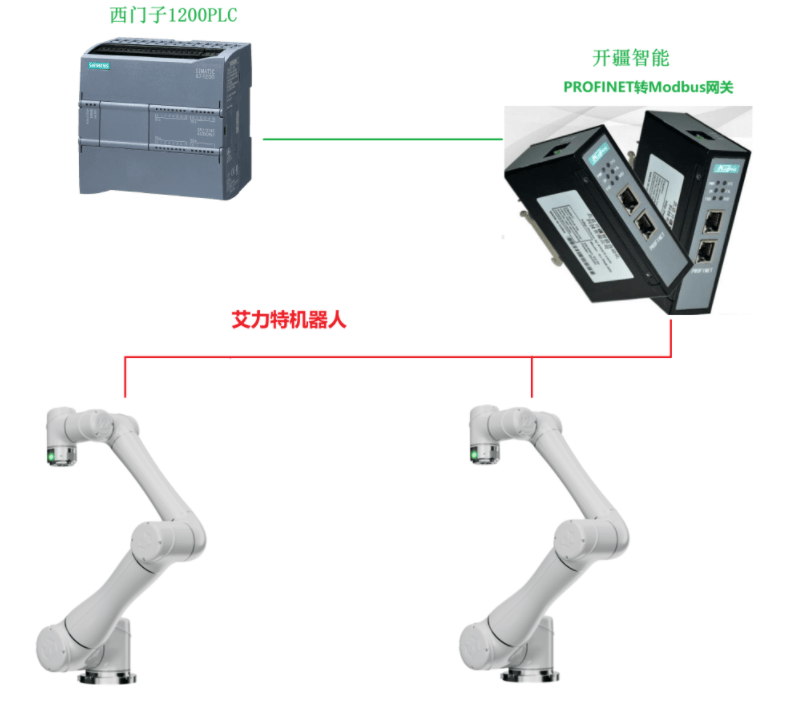
本案例是西门子PLC通过Profinet转ModbusTCP网关将机器人与PLC进行连接,保证数据可以进行转换。
配置方法:
器人做从站
机器人做从站,modbus通讯使用机器人控制柜FB1网口或FB2网口,连接控制柜和电脑,
机器人Ip设置:
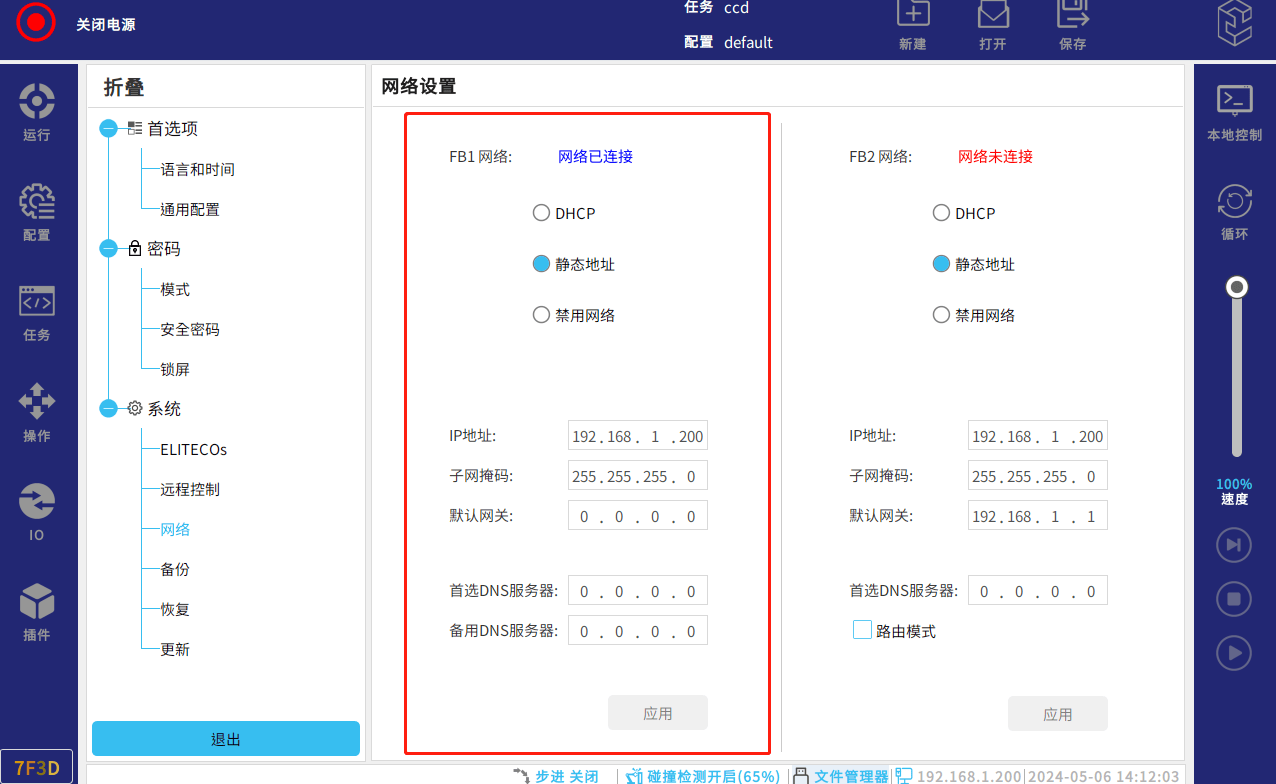
电脑设置为机器人的同一网段后可以ping一下查看网络是否连接正常
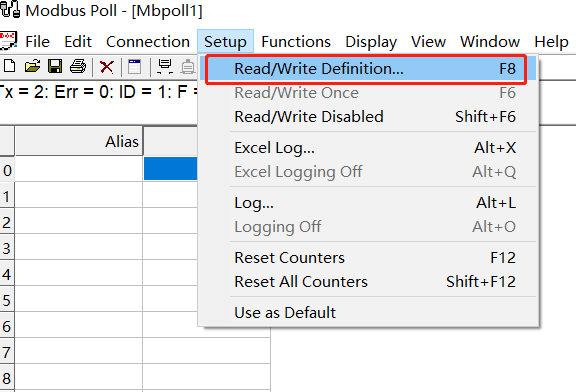
打开第三方网络调试助手modbus poll,--connection--connect,选择modbus tcp/ip,ip地址栏输入机器人的ip,端口默认502,最后点击ok
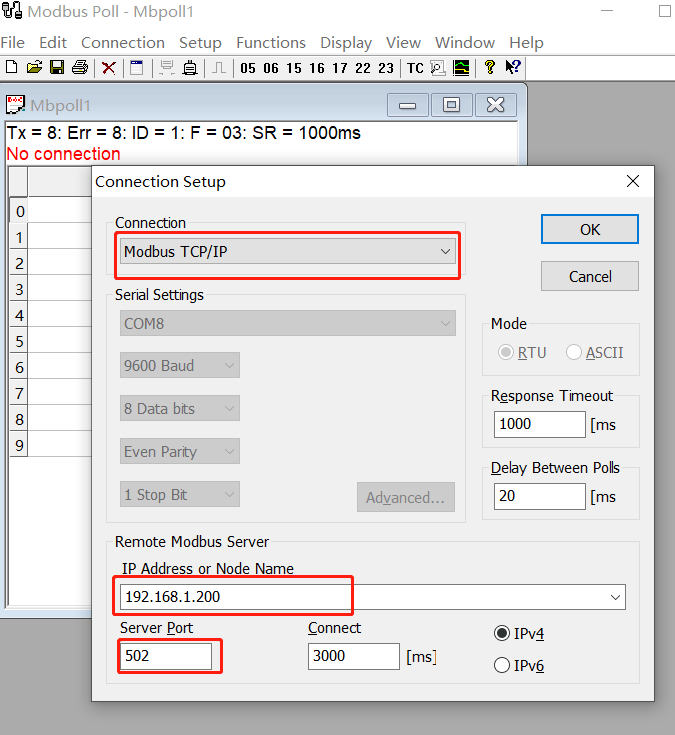
只要对话框不显示noconnection 就表明调试软件已连上cs机器人
接下来我们可以用modbus poll来:
写入标准数字输出
读取标准数字输出
读取标准数字输入
读取寄存器
写入寄存器
2.1.1读取标准数字输入
功能码选择 02 Read Discrete inputs ,地址格式十进制,起始地址 0,读写数量 24(机器人输入地址 0-23,共 24 个)
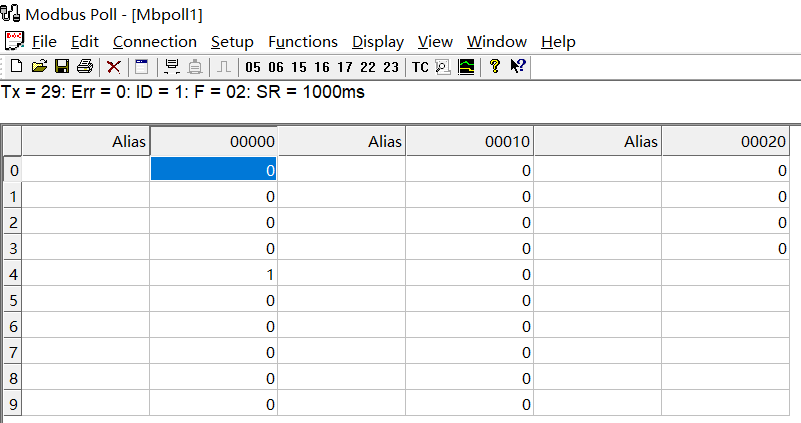
上图显示输入4为1与下图示教器显示匹配,可见读取成功
2.1.2读取标准数字输出
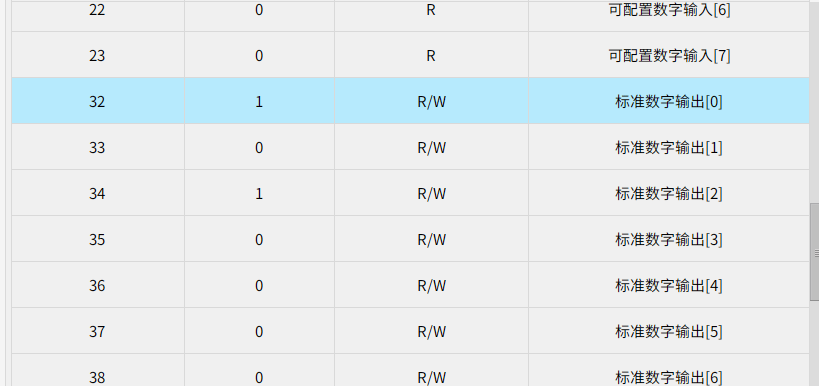
功能码选择 02 Read Discrete Inputs ,地址格式十进制,起始地址 32,(机器人输出地址 32-59,共 28 个),读写数量可选择 28 即全部读取
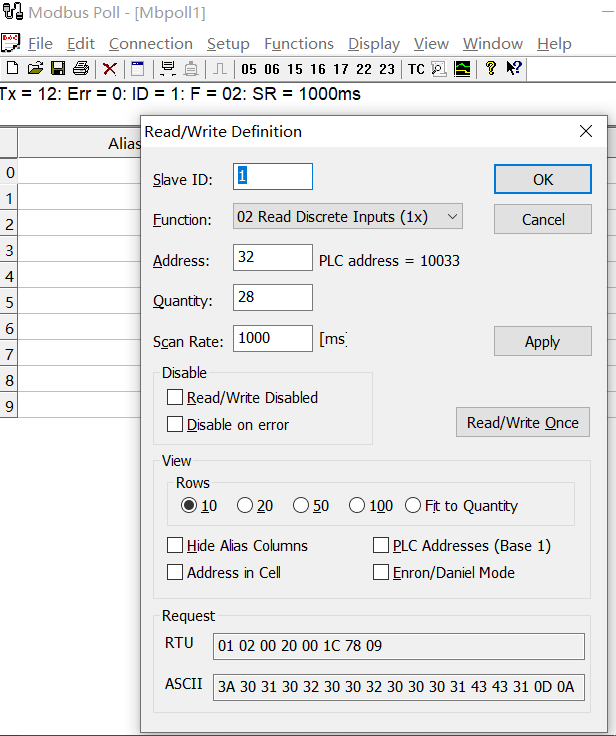
由图可见32与41为1,与机器人modbus slave界面显示标准数字输出0和标准数字输出显示的数据一样,可见读取成功
测试机器人的ModbusTCP通讯没问题后。开始对网关进行配置。
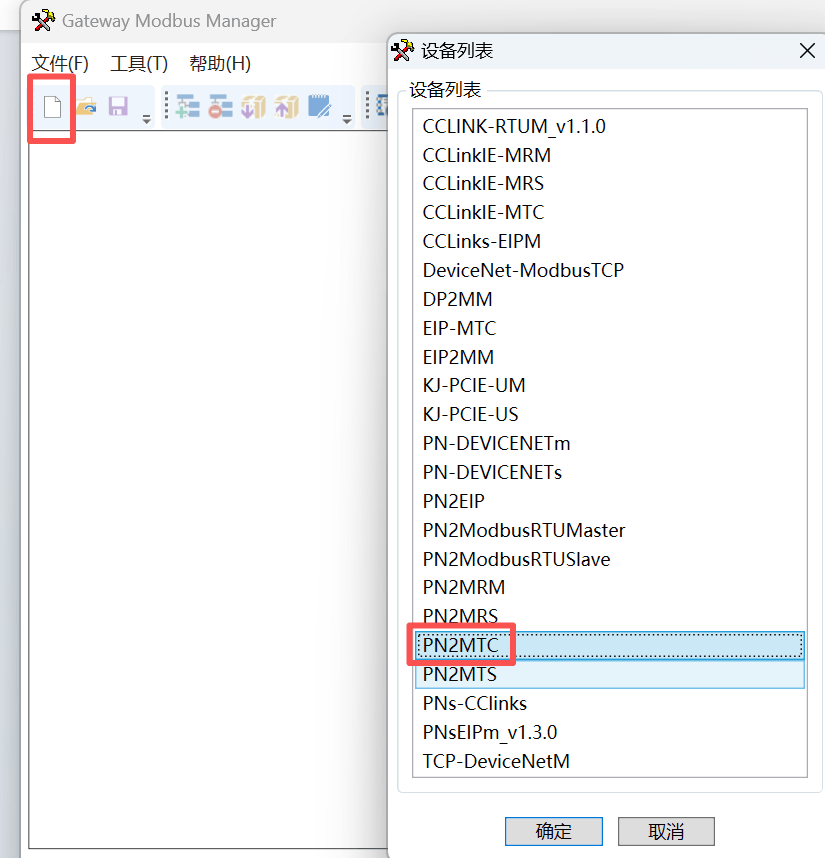
打开网关配置软件“Gateway Configuration Studio”
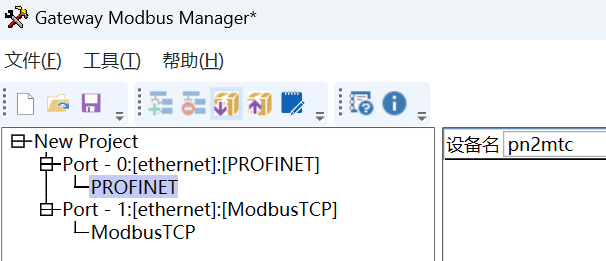
点击新建选择PN2MTC
点击Port-0设置网关Profinet参数
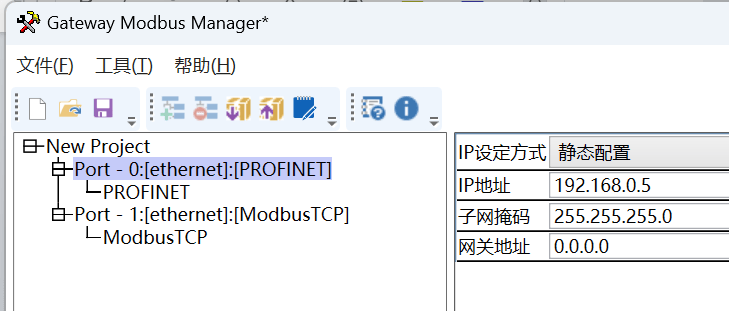
设置网关的ModbusTCP参数,首先设置网关作为客户端的IP地址。
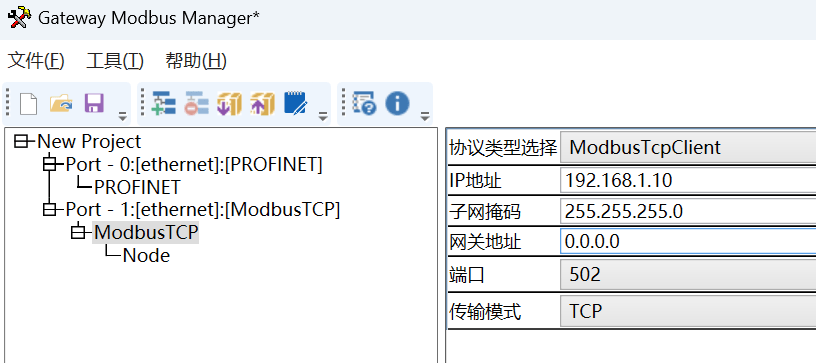
设置好后点击右键添加Node从站。
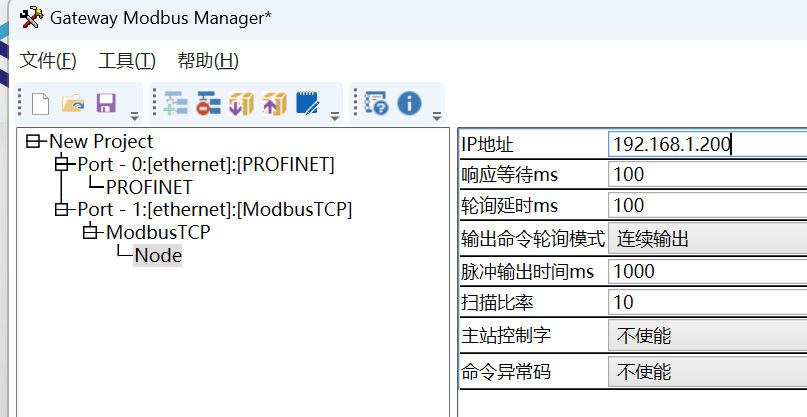
填写从站机器人的IP地址,192.168.1.200
设置发送输出的模式以及响应等待及轮询延时时间。
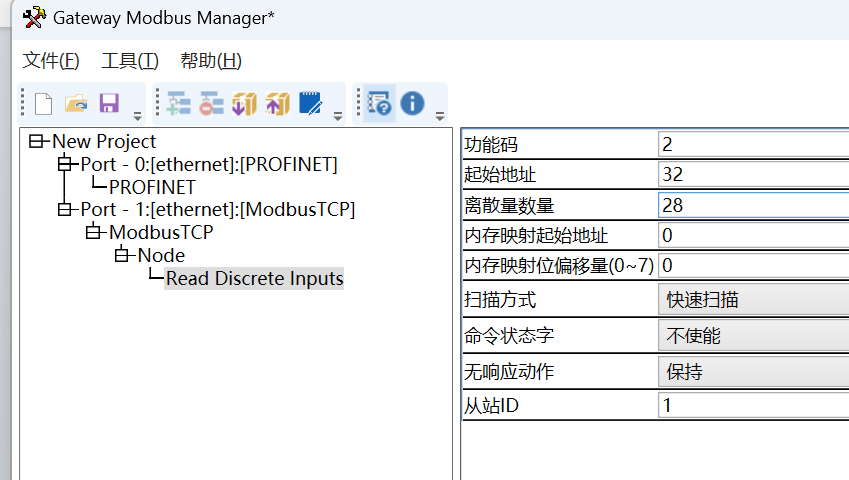
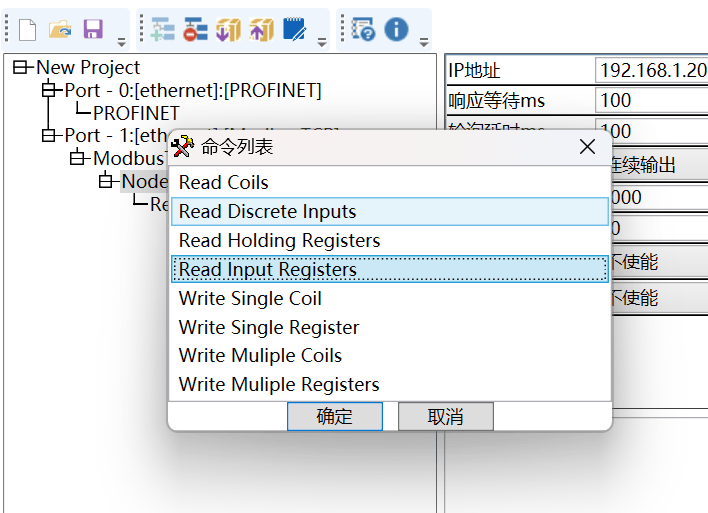
右键添加功能码,从ModbusPoll测试中看到使用了02功能码读取离散输入
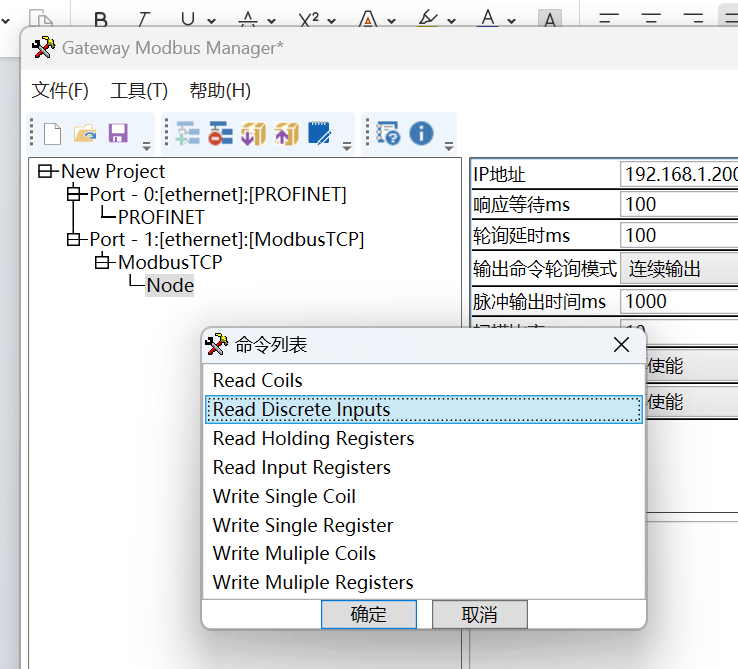
填入和ModbusPoll测试中同样的参数
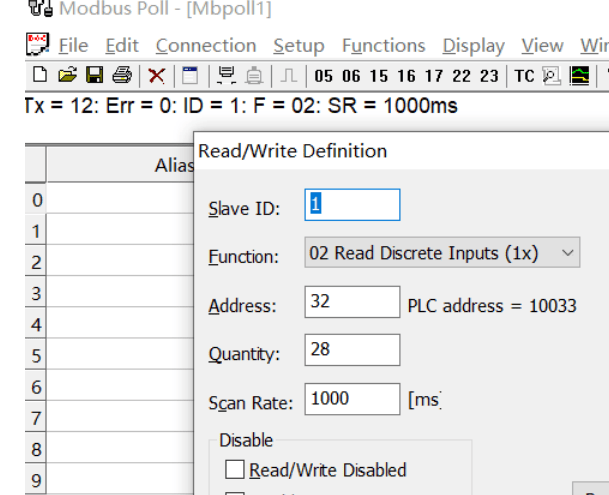
Poll参数中地址32,读取数量28。
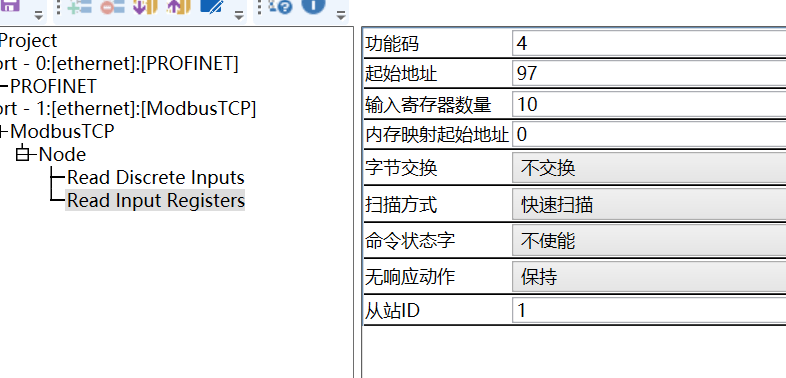
读取寄存器也是同理,测试案例显示使用04功能码读只读寄存器。
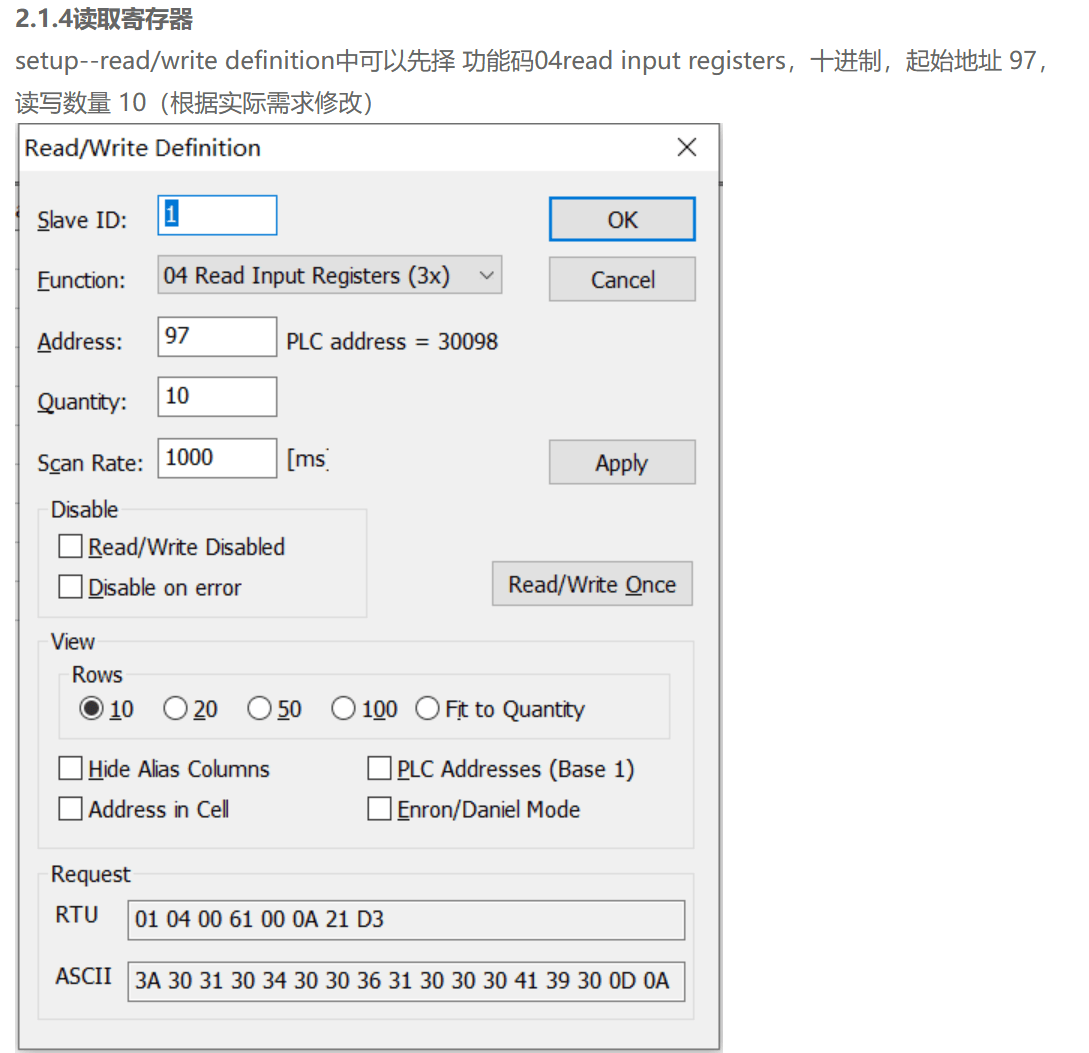
选择读取保持寄存器,将参数写入。
配置完成后将组态下载进入网关。
PLC配置:
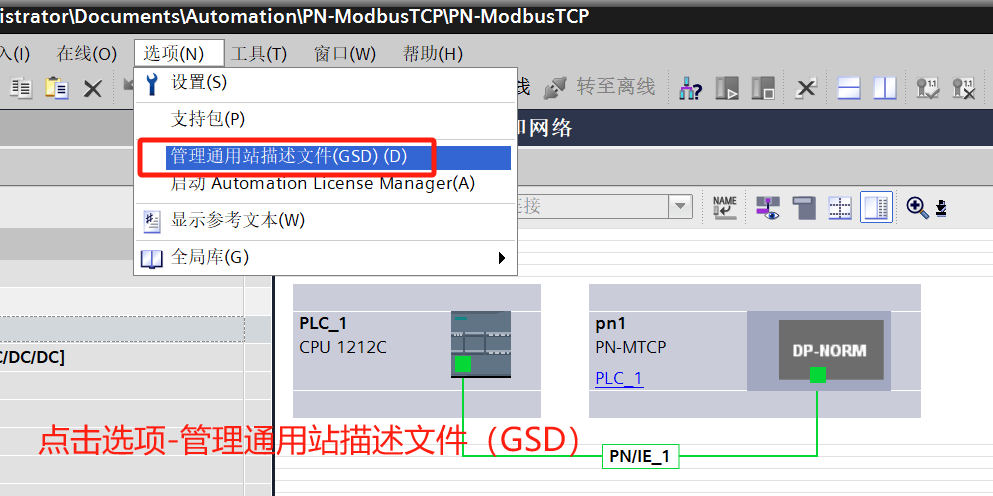
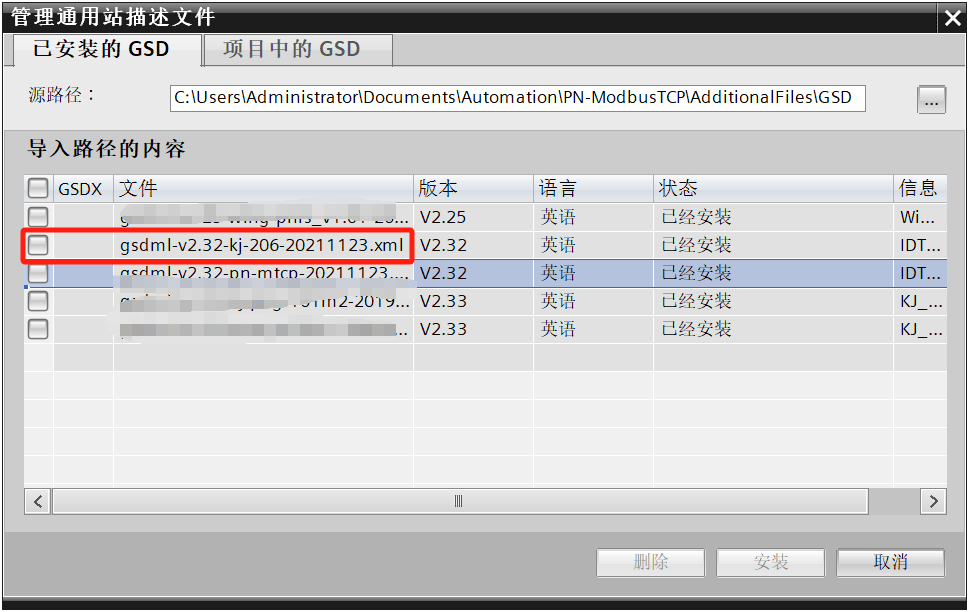
导入GSD完成后添加模块并组态网关在Profinet网络中的设备名称及IP地址。
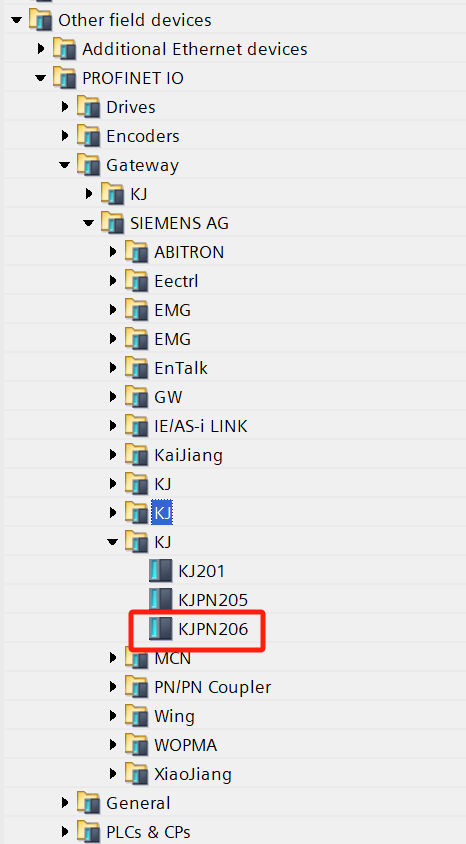
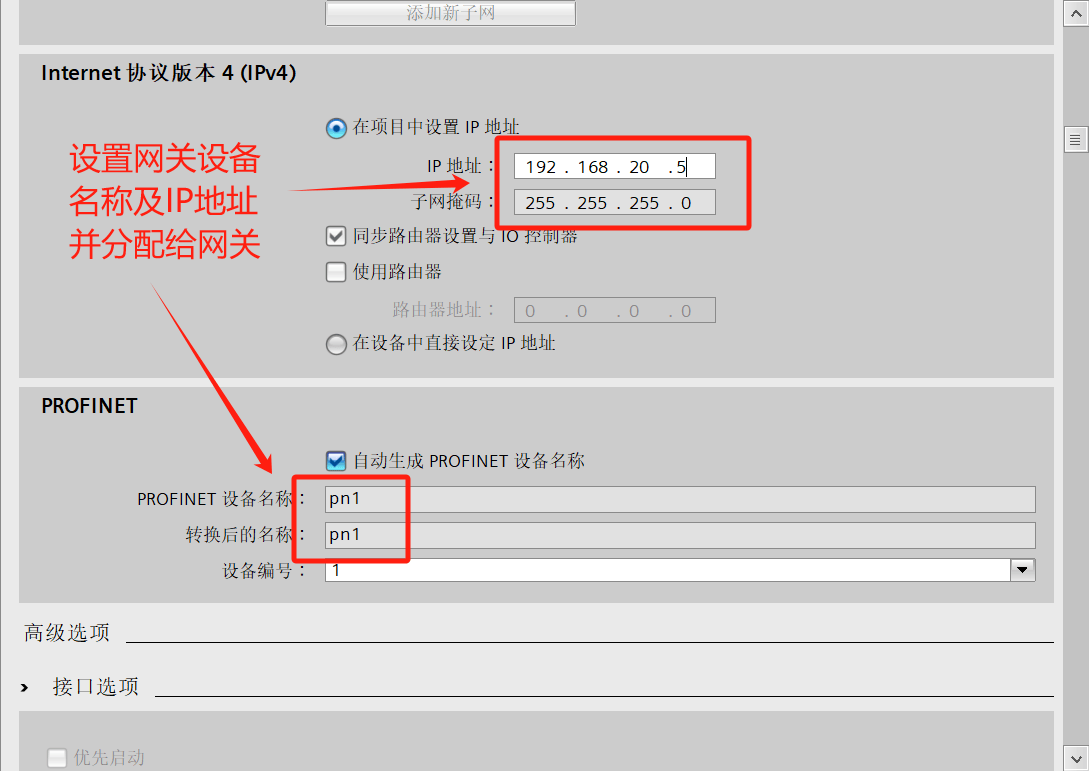
要和网关配置软件保持一致
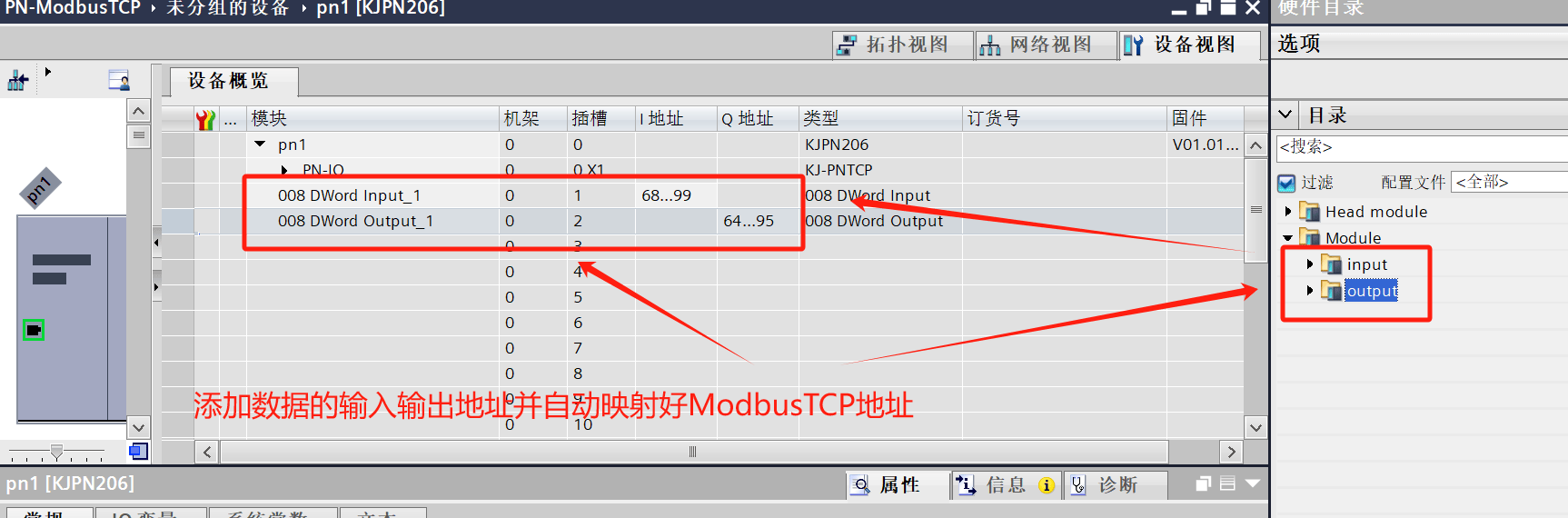
分配好数据对应长度和地址网关自动对应Modbus地址区
组态完成后下载至PLC,打开两边监控软件测试数据是否正常通讯。
审核编辑 黄宇
-
开疆智能ModbusTCP转Profient网关连接ER机器人配置案例2025-08-04 1210
-
开疆智能ModbusTCP转CClinkIE网关连接台达DVP-ES3 PLC配置案例2025-06-28 1841
-
开疆智能ModbusTCP转Devicenet网关连接远程I/O配置案例2025-06-23 1087
-
开疆智能Profinet转ModbusTCP网关连接BORUNTE伯朗特系统配置案例2025-05-20 942
-
开疆智能Profinet转ModbusTCP网关连接WINCC配置案例2025-05-17 1848
-
开疆智能Profinet转EthernetIP从网关连接ABB机器人做EtherNet主配置案例2024-12-17 1189
-
ModbusTCP转Profinet网关连接施耐德PLC配置案例2023-10-08 3046
-
profinet转ethernet网关连接发那科机器人配置案例2023-08-03 1604
-
Profinet转Modbus TCP网关连接搬运机器人配置案例2023-06-07 2026
全部0条评论

快来发表一下你的评论吧 !
