

告诉你制作单片机需要哪些知识?
电子说
描述
来来来,让我们一起,左手右手一个慢动作。
每一个方向都值得一个人用一生去钻研,每一个步骤都有其自身的魅力。
第一步,做出实体芯片。
单片机一般理解为MCU(Microcontroller Unit,微控制单元)包含定时器、ALU(Arithmetic Logic Unit,算术逻辑单元)、内存、寄存器、总线等部分而普通的意义的单片机还包含GPIO、串口(UART)、DMA、协处理器、ADDA等等。
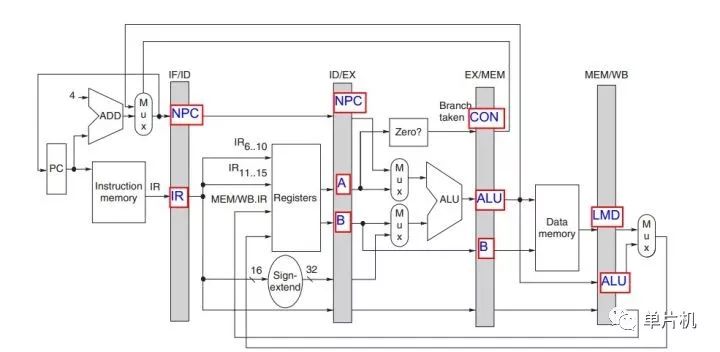
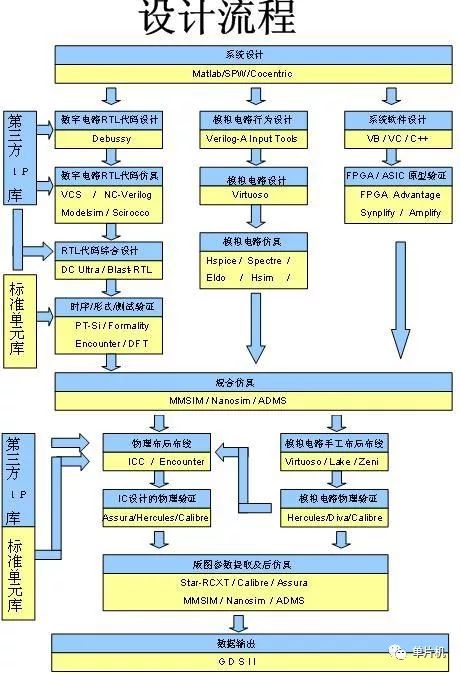
看懂如下图前置:计算机组成原理,微机原理。
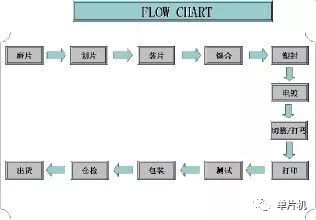
流水线
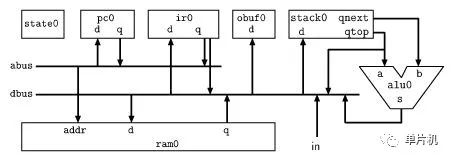
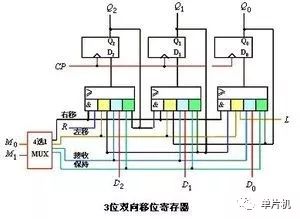
前置:数字逻辑电路,集成电路设计及其EDA技术,verilog把各个模块细分为寄存器级,比如移位运算器、节拍器、译码器、存储器等
module minicpu(clk, reset, run, in, cs, pcout, irout, qtop, abus, dbus, out); input clk,reset,run; input [15:0] in; output [1:0] cs; output [15:0] irout, qtop, dbus, out; output [11:0] pcout, abus; wire [15:0] qnext, ramout, aluout; reg [11:0] abus; reg halt, jump, pcinc, push, pop, thru, qthru, dbus2qtop, dbus2ram, dbus2obuf, ir2dbus, qtop2dbus, alu2dbus, ram2dbus, in2dbus; reg pop2, ir2abus, qtop2abus, qnext2abus; reg [11:0] pcout, pcnext; reg [15:0] out; statef statef0(.clk(clk),.reset(reset),.run(run),.halt(halt),.cs(cs)); stackm stackm0(.clk(clk),.reset(reset),.load(dbus2qtop),.push(push),.pop(pop),.pop2(pop2),.thru(qthru),.d(dbus),.dthru(ramout),.qtop(qtop),.qnext(qnext)); alu alu0(.a(qtop),.b(qnext),.f(irout[4:0]),.s(aluout)); dpram #(16,10,1024) dpram0(.clk(clk),.load1(dbus2ram),.addr1(abus),.addr2(pcnext),.d1(dbus),.q1(ramout),.q2(irout));
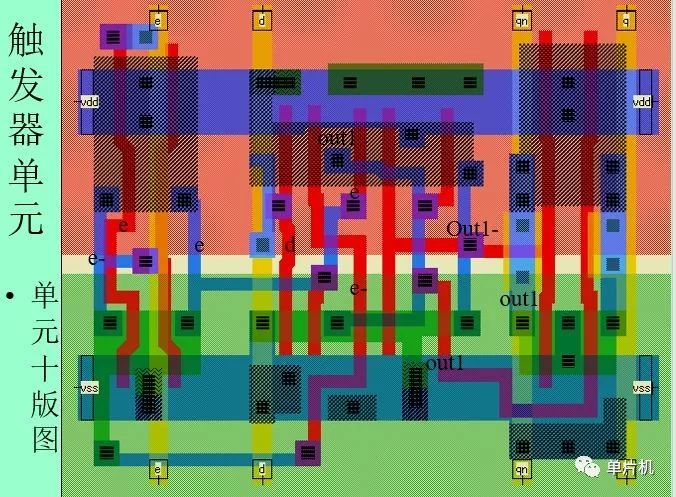
物理上是这样的
然后会调试BUG,看时序。前置:时序用MODELSIM,综合用QUARTUS II 等等
然后此时才刚刚开始。继续生成电路网表,时序收敛,如果不对继续返回上述流程继续调试。前置:Synopsys
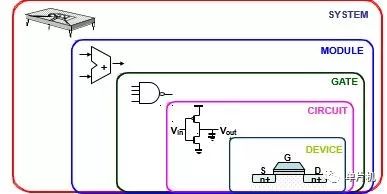
回顾一下
此时应该生成版图文件,然后根据制造厂商提供的物理器件库进行最后的各种设计规则检查。前置:集成电路版图设计,软件有Cadence:Virtuoso Layout Editor
送到代工厂
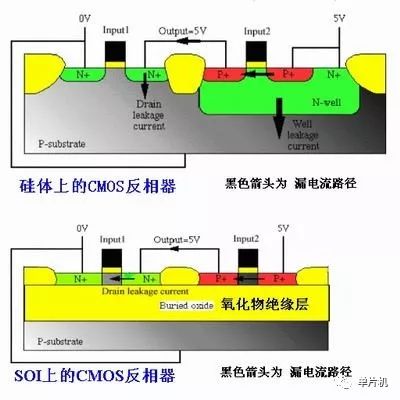
还要懂元器件前置:半导体物理,半导体器件物理,固体物理,电介质物理,量子力学,热力学与数理统计。
根据得到的图表设计版图和工艺流程,大概是这样前置:集成电路制造
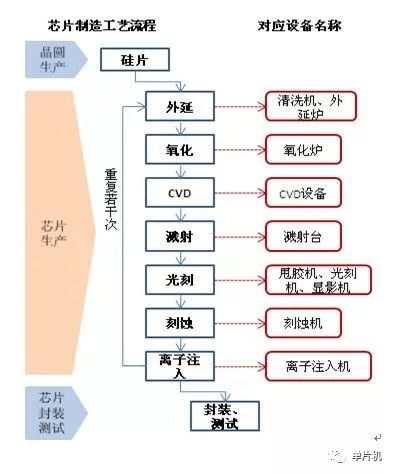
然后进行电气测试,电磁测试,最后封装。前置:集成电路封装技术
最后不能忘记出片的时候焚香沐浴更衣,朝南拜三拜,祈祷不会有大问题。
第二步,设计系统驱动。
终于得到了物理上的片子我们开始写汇编器,编译器。本质上烧写进ROM的是这样的机器码。
汇编器(把汇编语言变成机器码)前置:perl
#!/usr/bin/perl -W //******** *********// print "*** LABEL LIST *** "; foreach $l (sort(keys(%label))){ printf "%-8s%03X ",$l,$label{$l}; } $addr=0; print " *** MACHINE PROGRAM *** "; foreach (@source){ $line = $_; s/w+://; if(/PUSHIs+(-?d+)/){ printf "%03X:%04X $line",$addr++,$MCODE{PUSHI}+($1&0xfff); } elsif(/(PUSH|POP|JMP|JZ|JNZ)s+(w+)/){ printf "%03X:%04X $line",$addr++,$MCODE{$1}+$label{$2}; }elsif(/(-?d+)/){ printf "%03X:%04X $line",$addr++,$1&0xffff; } elsif(/([A-Z]+)/){ printf "%03X:%04X $line",$addr++,$MCODE{$1}; } else { print " $line"; } }
编译器 BISON和FLEX(把高级语言转换成汇编语言)前置:编译原理
%{ #include NAME NUMBER %destructor { free($$); } NAME NUMBER %token
终于可以固化进ROM可以跑程序了,你还需要一段小型的开启代码(bootloader)前置:汇编语言
start: JK start nop sdal 32 sdah 0 datp loop: ting inl ting inh jend cxcute nop jmp loop inc excute: call 32 nop jmp start nop
然后开始写操作系统前置:ucos(嵌入式操作系统)系统宏定义,系统功能配置,系统头文件,初始化文件,调度文件,任务管理文件系统时间管理文件,信号量文件,邮箱文件,消息队列文件,内存管理文件,系统服务文件,MAIN文件。
写操作系统中的任务前置:C语言,数据结构,算法导论。
double KalmanFilter(const double ResrcData, double ProcessNiose_Q,double MeasureNoise_R,double InitialPrediction) { double R = MeasureNoise_R; double Q = ProcessNiose_Q; static double x_last; double x_mid = x_last; double x_now; static double p_last; double p_mid ; double p_now; double kg; x_mid=x_last; //x_last=x(k-1|k-1),x_mid=x(k|k-1) p_mid=p_last+Q; //p_mid=p(k|k-1),p_last=p(k-1|k-1),Q=噪声 kg=p_mid/(p_mid+R); //kg为kalman filter,R为噪声 x_now=x_mid+kg*(ResrcData-x_mid);//估计出的最优值 p_now=(1-kg)*p_mid;//最优值对应的covariance p_last = p_now; //更新covariance值 x_last = x_now; //更新系统状态值 return x_now; }
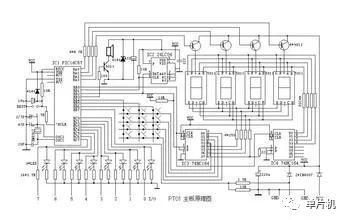
拿着含辛茹苦的板子还需要配置最小系统以及外围器件前置:PCB设计和制造,电焊等技艺,模电、高频电子线路,信号与系统
如果有信号传输通讯协议前置:SPI,I2C,CAN,TCP/IP、wifi等等
uint SPI_RW(uint uchar) { uint bit_ctr; for(bit_ctr=0;bit_ctr<8;bit_ctr++) // output 8-bit { MOSI = (uchar & 0x80); // output 'uchar', MSB to MOSI uchar = (uchar << 1); // shift next bit into MSB.. SCK = 1; // Set SCK high.. uchar |= MISO; // capture current MISO bit SCK = 0; // ..then set SCK low again } return(uchar); // return read uchar }
RF天线前置:微波技术,电磁场与电磁波,HFSS,天线技术等等。
-
单片机属于什么专业_学单片机需要什么基础知识2023-03-21 22936
-
学习单片机需要什么基础?2022-05-18 23860
-
你学过单片机吗?你会运用单片机吗2021-11-22 1491
-
学单片机需要掌握哪些知识呢2021-11-02 2249
-
关于单片机蓝牙模块的知识点看完你就懂了2021-10-28 4458
-
单片机编程需要掌握哪些知识2021-10-18 1946
-
单片机编程需要掌握哪些知识?2021-07-14 1153
-
选择单片机需要考虑什么2020-07-16 2152
-
单片机原理及应用教程之单片机基础知识概述2019-04-16 1687
-
单片机基础知识2016-12-11 1294
-
39个单片机的小制作2016-07-26 4415
-
单片机基础知识C51版2015-11-18 1128
-
单片机的音乐盒设计制作(C程序)2011-08-17 4183
-
单片机讲座--单片机基础知识2010-07-16 910
全部0条评论

快来发表一下你的评论吧 !
