

TB67H450FNG 是一款使用 PWM 恒流控制 的 双极步进电机 驱动器
电子说
描述
1. 控制信号部分
所有控制信号输入端(IN1, IN2, nENABLE, MDODE)内部都有 Schmitt Trigger,对噪声不敏感。
2. 电机驱动与电流检测部分
3. PCB 布局重要建议
4 基本工作流程(如何驱动)
高电压、大电流:最大额定值 50V / 4.5A(峰值)。
低导通电阻:高侧 + 低侧 MOS FET 总阻值仅 0.25Ω(典型值),发热小,效率高。
多种衰减模式:支持混合衰减和慢衰减,电机运行更平稳,噪声更小。
内置保护电路:包括过流保护(OCP)、过热保护(TSD)、以及欠压锁定(UVLO)。
1. 典型应用电路框图
一个完整的 TB67H450FNG 应用电路主要由三部分组成:电源部分、控制信号部分和电机驱动部分。
2. 详细电路原理图及元件说明
以下是围绕 TB67H450FNG 搭建的详细应用电路图及每个部分的关键元件说明。
核心电路原理图
graph TD
subgraph Power Supply
VM_PWR[VM Power Supply 12-44V] --> VM
GND_PWR[GND] --> GND
end
subgraph MCU / Controller
MCU_3V3[3.3V/5V MCU] --> VDD
MCU_GND[MCU GND] --> SGND
MCU_IN1[GPIO IN1] --> IN1
MCU_IN2[GPIO IN2] --> IN2
MCU_nEN[GPIO nENABLE] --> nENABLE
end
subgraph TB67H450FNG
VM --> IC[VM Pin]
VDD --> IC[VDD Pin]
GND --> IC[GND Pin]
SGND --> IC[SGND Pin]
IN1 --> IC[IN1 Pin]
IN2 --> IC[IN2 Pin]
nENABLE --> IC[nENABLE Pin]
subgraph Current Reference
POT[Potentiometer] --> VREF[VREF Pin]
end
subgraph Decay Mode
MDODE_SEL[MDODE Selection] --> MDODE[MDODE Pin]
end
subgraph Outputs
IC -- OUT1A --> MOTOR_A1[Motor A+]
IC -- OUT2A --> MOTOR_A2[Motor A-]
IC -- OUT1B --> MOTOR_B1[Motor B+]
IC -- OUT2B --> MOTOR_B2[Motor B-]
end
end
subgraph Motor
MOTOR_A1 --> COIL_A[Coil A]
MOTOR_A2 --> COIL_A
MOTOR_B1 --> COIL_B[Coil B]
MOTOR_B2 --> COIL_B
end
subgraph Protection & Filtering
C_VM_Bulk[100uF Electrolytic] -- VM to GND
C_VM_Ceramic[0.1uF Ceramic] -- VM to GND
C_VDD[0.1uF Ceramic] -- VDD to SGND
end
(请根据此逻辑图绘制实际电路连接)
关键元件功能详解
1. 电源部分
VM(电机电源): 这是驱动电机线圈的主电源。电压范围建议在 12V 到 44V 之间,具体取决于你的电机额定电压和所需转速。电流能力需要满足电机需求。
C1(大容量电解电容): 靠近芯片的 VM 和 GND 引脚放置一个 100μF 或更大的电解电容,用于平滑电源电压,吸收电机启停和反向时产生的大电流冲击。
C2, C3(高频去耦电容): 靠近芯片的 VM 和 GND 引脚放置一个 0.1μF 和一個 1μF 的陶瓷电容,用于滤除高频噪声,为芯片内部电路提供清洁的电源。
VDD(逻辑电源): 为芯片内部的逻辑电路(如输入信号处理)供电。通常接 3.3V 或 5V。此电压必须与你的MCU(如Arduino, STM32)的逻辑电平匹配。
C4(去耦电容): 靠近芯片的 VDD 和 SGND 引脚放置一个 0.1μF 的陶瓷电容。
IN1 和 IN2(线圈 A 的输入信号): 这两个引脚的逻辑电平组合决定线圈 A 的电流方向(即步进电机的步进模式)。
IN1=H, IN2=L -> 电流从 A+ 流向 A-
IN1=L, IN2=H -> 电流从 A- 流向 A+
IN1=L, IN2=L -> 快速衰减(刹车)模式
IN1=H, IN2=H -> 高阻抗状态(电机自由停止)
nENABLE(使能引脚,低电平有效): 当此引脚为低电平时,芯片正常工作。当为高电平时,所有输出MOSFET关闭,电机处于自由状态(无保持扭矩)。通常可以将其直接连接到MCU的GND以保持常使能。
VREF(电流参考电压): 这是最关键的引脚之一,用于设定输出给电机的最大电流值(I_{max})。计算公式为:
(Ω))Imax(A)=VREF(V)/(8×RNF(Ω)) 其中 RNF 是电流检测电阻(见下文)。通常使用一个电位器分压来产生 VREF,以便灵活调整电流。
MDODE(衰减模式选择):
接 SGND(低电平): 选择 混合衰减模式。这是最常用的模式,能减少电机振动和噪声,运行更平稳。
接 VDD(高电平): 选择 慢衰减模式。
OUT1A, OUT2A: 连接至步进电机 A 相线圈 的两端。
OUT1B, OUT2B: 连接至步进电机 B 相线圈 的两端。
电流路径最短: 大电流路径(VM -> 芯片输出 -> 电机线圈 -> 检测电阻 -> GND)的走线应尽可能短而宽,以减少寄生电感和电阻,降低电压损失和噪声。
去耦电容就近放置: C2, C3, C4 必须紧靠芯片的相应引脚放置。
检测电阻的走线: 连接到检测电阻 R_{NF} 两端的采样走线(到芯片的 NFA1, NFA2, NFB1, NFB2 引脚)应直接从电阻焊盘引出,并尽量靠近芯片。这些是敏感的信号线,应远离大电流和开关噪声源。
散热考虑: TB67H450FNG 采用 HZIP25-P-1.27 封装,底部有一个大的散热焊盘。必须将这个散热焊盘焊接在PCB板上,并通过多个过孔连接到底层的大面积铜皮(GND)上,以帮助散热。
硬件连接: 按上述原理图连接好电路。
设置电流: 通过调整 VREF 的电压,根据公式设定你电机所需的额定电流。例如,如果你的电机额定电流为 1A,使用 0.22Ω 的检测电阻,
选择衰减模式: 通常将 MDODE 接地,选择混合衰减模式。
使能芯片: 将 nENABLE 拉低。
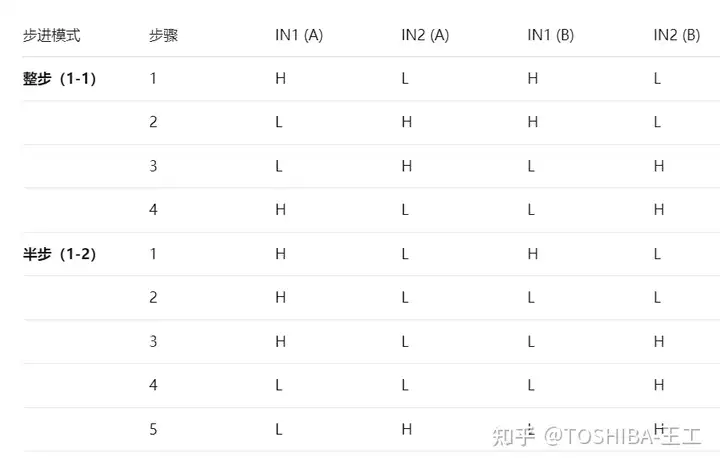
发送脉冲序列: 通过 MCU 控制 IN1 和 IN2 的时序,即可驱动电机。常见的步进模式(如整步、半步、1/4细分等)都是通过特定的 IN1/IN2 时序组合实现的。
R_{NFA1}, R_{NFB1}(电流检测电阻): 这两个电阻串联在输出驱动管和地之间,用于检测电机电流。芯片通过测量电阻两端的电压来实施PWM恒流控制。电阻值的选择至关重要:
阻值: 通常选用 0.1Ω 到 0.5Ω 之间的低阻值、高功率精度电阻。
功率: 电阻的功率必须足够大。例如,电机相电流为 1.5A,电阻为 0.22Ω,则每个电阻的功耗为 1.52×0.22≈0.5 1.52×0.22≈0.5W。因此,至少应选择 1W 或 2W 的电阻以确保安全。
编辑这份详细的说明能帮助你成功设计和应用 TB67H450FNG 电机驱动电路仅供参考。在实际制作时,务必参考官方的 TB67H450FNG 数据手册 以获取最权威的参数和布局指南或官方技术支持wdylsq
审核编辑 黄宇
-
TB67S109AFTG, TB67S109AFNG是一款采用PWM斩波器的两相双极步进电机驱动器内置有时钟输入解码器。采用BiCD工艺制造2025-05-13 1474
-
TB67S581FNG恒流两相步进电机驱动IC英文手册2024-07-23 689
-
介绍东芝 TB67S580FNG:理想的双极步进电机控制解决方案2024-07-08 1489
-
充分利用东芝 TB67H450FNG 实现电机控制需求2024-07-05 2728
-
TB67H450FNG直流有刷电机驱动IC英文手册2023-05-18 1109
-
TB67H450FNG HSOP8封装兼容引脚分配2022-11-03 6783
-
TB67H450FNG有刷直流步进电机驱动IC2022-10-25 1162
-
TB8825FNG两相双极步进电机驱动器IC斩波器数据手册2022-09-07 788
-
TB67S109AFNG时钟控制双极步进电机驱动器数据手册2022-08-04 1431
-
【免费试用03期】东芝电机驱动IC TB67H450FNG试用活动2022-07-19 20411
-
TB67H450FNGPWM斩波型直流有刷电机驱动器数据手册2022-07-15 2313
-
TB67H450FNG有刷直流电机驱动器IC其主要特性是什么?2021-07-19 2081
-
TB67H450FNG新品电机驱动IC2020-01-06 2414
-
东芝有刷直流电机驱动器IC系列产品再增新动力——TB67H450FNG2019-05-31 14617
全部0条评论

快来发表一下你的评论吧 !
