

一种适用于北斗MEO/IGSO卫星的弱信号捕获算法
电子说
描述
针对北斗B1频段MEO/IGSO卫星上NH码调制导致捕获难度增大的问题,对GPS所用的差分捕获算法进行改进,得出了一种适合北斗B1 MEO/IGSO卫星的捕获算法。通过本地生成经NH调制的C/A码作为新的伪随机码,加长相干积分时间,以差分累加的方式对相干积分结果进行运算,并按照累加结果最大准则判断差分项的符号,找出最佳搭配组合。仿真结果表明,改进算法能提高2 dB~3 dB的增益。
0 引言
信号捕获是处理卫星信号的必要步骤,其结果对于后续跟踪、定位解算的精度有很大的影响[1]。尤其是在复杂环境中,弱信号的捕获技术一直是限制卫星导航技术应用的关键因素[2-4]。其中差分相干算法在全球定位系统(Global Positioning System,GPS)弱信号捕获中已经被广泛应用,然而对于调制NH码的北斗B1中地球轨道/倾斜地球同步轨道(Medium Earth Orbit/Inclined Geosynchronous Orbit,MEO/IGSO)卫星,直接使用差分捕获算法不能达到捕获弱信号的目的。经过NH(Neumann-Hoffman)调制虽然提高了抗窄带干扰能力、增强了卫星信号的相关性,但也带入了更多的比特跳变[5-7]。为了能够充分利用差分捕获算法的优势,文献[8]介绍了一种四分法与差分相干结合的改进算法,这种算法对导航数据跳变进行了估计,提高了数据利用率,但这种算法只适合于北斗GEO;文献[9]提出了的一种基于复数型差分相关的弱信号快速捕获算法,削弱了NH码相位变化的影响,但对比特跳变的影响没做过多的处理;文献[10]基于差分相干与短时匹配滤波器和快速傅里叶变换,并利用最小二乘拟合,可以得到更精确的捕获多普勒频率值,但算法复杂度也比较高,不利于硬件实现。
本文拟从减弱比特跳变的影响和加长积分时间两方面着手对差分算法进行改进,分析二次调制对卫星信号的影响,估计差分项的符号,以期提高捕获灵敏度。
1 捕获原理
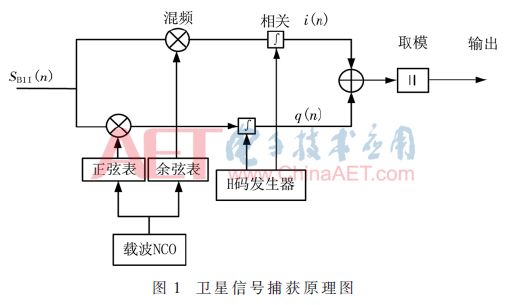
卫星信号的捕获即是对中频数字信号进行解调以及解扩的过程。经过二次调制的导航电文实现了二次扩频,因此通过二次解扩才能有效地捕获到卫星信号。本文中把经二次调制的测距码认定为一种新的码(NH),只需实现NH码的解扩。判断解调与解扩之后的相关峰值,超过捕获预设门限则捕获成功。
常用的卫星信号捕获方法有串行捕获和并行捕获,本次实验使用基于FFT的并行码相位捕获算法。捕获原理如图1所示。
经过数模转换后的SB1I数字中频输入信号数学表达式为[11]:
式中,k为参与相干积分的离散点数。通过不断调整多普勒频率和延迟,当τ=τL以及fd=fLd时,S(τ,fd)的值最大。相干积分处理增益与相干时间呈正相关,但导航数据的跳变使得相干积分不能无限制使用,因此一般使用非相干或差分相干的方式对相干积分结果进行累加来提高信噪比。
非相干积分是对每次相干积分取模后平方的值进行累加。数学原理如式(6)所示,由于进行了平方操作,因此非相干积分可以消除导航数据跳变的影响,有效提高信号的信噪比。但信号平方的同时噪声也进行了平方,且经过平方的噪声不能通过累加抵消,这样会带来很大的平方损耗[12],因此针对弱信号捕获一般使用差分相干技术。
2 改进算法
2.1 新本地码生成
常规的捕获算法中是以C/A码作为本地码与卫星信号进行匹配,北斗卫星C/A码的长度为1 ms,由于NH调制的存在,因此每次相干积分的时间只能为1 ms。若超过1 ms,NH码相位的跳变会导致相干积分结果的衰减。
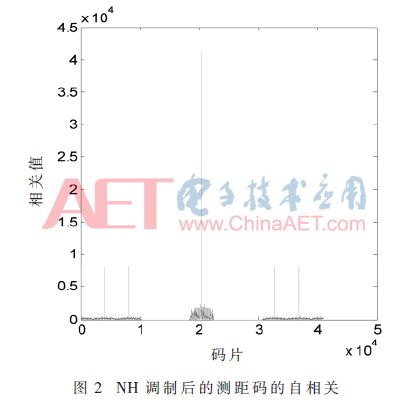
本文以NH二次调制的伪码作为新的本地码,称为新本地码。新本地码的相关性如图2所示,可以看出经NH码二次调制的测距码也有良好的自相关特性,虽然在其他码片处也会出现相关峰值,但与主峰相比较低,不影响捕获结果。从图中可以看出相邻峰值的差值为
2 046的倍数,所以在捕获结果中会出现相对较低的其他峰值,这些峰值之间的距离为2 046的整数倍(若码片精度为一个码片)。经过二次调制的测距码与导航电文具有相同的周期,测距码的起始跳变沿即为导航电文的跳变沿,因此完全解扩后的相干积分时间段内不存在导航电文的跳变,消除了由此带来的相关功率损耗。新本地码长度为20 ms,因此可以与卫星信号进行长达20 ms的相干积分,极大地提高了处理增益。
2.2 差分相干算法及改进
将M×L ms的数据分为M等份,对每L ms数据与本地C/A码相关,结果为Ck′(τ,fd)(k′=1,2,3,…,M)。把前一时刻相干矩阵与后一时刻相干积分矩阵共轭的乘积进行累加即为差分相干。其表达式为:
对差分相干结果进行分析,第K′个相干积分矩阵Ck′可以表示为有用信号Vk′和噪声Nk′之和,前一时刻相干积分结果Vk′与后一时刻的相干积分结果Vk′+1是相关的,而噪声项中随机噪声与信号、噪声与噪声之间是不相关的,同时噪声项也具备零均值高斯噪声的特点,可以通过累加抵消。因此差分相干既可以达到增强信噪比的目的,又可降低平方损耗。相较于非相干积分,相干积分可以提高处理增益。
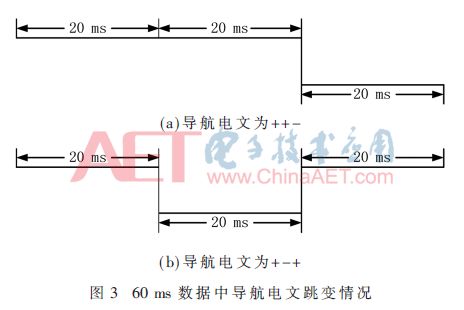
北斗非同步卫星NH码和导航电文的周期相同,NH码的起点即导航电文的跳变沿,因此以20 ms进行相干积分时不需要考虑积分时间段内导航电文的跳变。导航电文只有1和-1两种情况,取60 ms数据,H码已经对齐,对于图3(a)所示只有一次导航电文跳变的情况,俩次差分结果的累加和为0,存在数据的正负抵消;对于图3(b)所示的有2次导航跳变的情况,2次差分结果的累加和为-2,没有数据的抵消。以随机事件进行分析,在3 bit导航电文中只出现一次导航电文跳变的概率为1/4。这对于系统增益会有很大的损失。
针对这种情况,本文对每20 ms所对应的导航电文进行极性估计,导航电文极性的改变不会影响输入信号和本地信号的载波和码相位,因此可以通过改变差分项的符号来消除导航跳变引起的系统处理增益的损失。对于导航电文为1,-1,-1,1 ,1,-1,-1,1的160 ms数据进行差分,其结果为-1,1,-1,1,-1,1,-1。对差分结果的符号进行判断,假定第一个差分结果的符号为+,则差分项符号只有在+ - + - + - +的情况下累加结果最大。每个差分项都有两种可能的符号,因此20×(M+1) ms数据的差分项符号会有2M种组合。遍历2M种组合,找出相关值的最大值,此值所对应的差分项符号的组合即为最佳路径。最佳路径估计的实质是要找出使每次累加的值都在增大且其最终累加结果最大的符号组合。因此可以不必遍历2M种组合,快速找出最佳路径。
本文中所用的是并行码相位捕获算法,其所有码相位的搜索是通过两次FFT和一次IFFT同时完成的。因此一个频率槽对应一个路径。设差分矩阵为D,本地多普勒频率为f,差分项符号为A1,A2,A3,…,AM。令A1=1,E1=D1。详细过程描述如下:
(1)令S1=D1+D2,S2=D1-D2。若|S1|>|S2|,则A2=1,E1=S1,否则A2=-1,E1=S2;
(2)令S1=E1+D3,S2=E1-D3。若|S1|>|S2|,则A3=1,E1=S1,否则A3=-1,E1=S2。
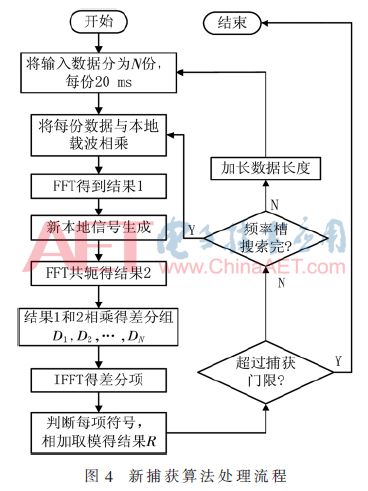
重复执行以上步骤,直到求出AM的符号。从所有频率所对应的路径中,选出使E1最大的路径。比特估计算法同样适用于GEO卫星,需要注意弱信号对于频率偏移较敏感,因此用这种算法捕获弱信号时,必须加长相干积分的时间,否则可能增加误捕率。新捕获算法的算法流程如图4所示。
3 实验与分析
利用MATLAB对该算法进行仿真,实验中选用矩阵电子的多星座导航信号模拟器(型号为GNS-8332)产生卫星信号。可以通过配置通道参数生成不同功率的北斗B1射频信号,其最低可以产生-189 dBm的弱信号。采用莱特信息科技的多天线卫星中频信号采样器(型号为LT-
C-002)进行卫星数据采集,采样频率为20 MHz。中心频率为2.902 MHz,多普勒频率为-3 000~3 000 Hz。
模拟器产生北斗6号星的信号,其功率为-140 dBm,相干积分时间为20 ms,差分相干次数为10。如图5常规差分相干的捕获结果所示,多普勒频率和码相位分别为-1 500 Hz和31 563,最大相关峰值为3.02×1010。图6为经过比特最佳估计的差分相干捕获结果。其最佳比特为1 1 1 1 1 -1 1 1 -1 -1,多普勒频率与码相位与图5中相同,最大峰值为5.3×1010。从图中可以看出,改进后的算法比常规差分相关峰值有明显的增高。从两张图中都可以看出除主峰之外的其他峰值,这与二次调制的测距码相关性有关,同时在频率轴上主峰俩侧会出现次峰,这是由于NH码未完全对齐,导致积分时间段内有导航数据跳变所引起,不影响捕获结果。
通过模拟器以1 dBm不断衰减信号功率,测试算法捕获极限,对功率降低至-142 dBm的北斗非同步卫星信号进行实验,积分方式与实验一相同,比较两种算法的结果。此时传统差分相干捕获算法已经不能捕获到信号,而改进的差分相干算法在-142 dBm时仍有明显的峰值。继续衰减信号功率,当信号功率低于-145 dBm时,改进的差分算法不再有明显相关。利用两种方法对多组数据进行捕获,其结果表明改进的算法能比常规差分捕获算法提高2 dB~3 dB的增益。
4 结语
本文对适用于GPS的弱信号捕获方法进行了改进,提出一种适用于北斗MEO/IGSO卫星的弱信号捕获算法。该算法利用经NH调制的测距码的良好自相关性,进行20 ms的长数据相干,并对差分算法进行最佳比特估计。由于计算机内存的限制,本实验最多可以处理220 ms的数据,能够实现-145 dBm的弱信号捕获。若加长数据长度,可以实现更弱信号的捕获。
-
一种适用于无线通信系统的半盲ICA算法2010-04-23 1492
-
SKYLAB细聊“北斗+GPS”多模卫星定位模块2017-09-25 4636
-
GPS北斗卫星+惯性组合导航模块的优势分析2019-07-15 2892
-
一种适用于模拟/数字混合信号环境的接地技术2021-04-25 1430
-
一种适用于室内复杂环境的高精度、环境自适应性强的定位算法2021-08-18 1564
-
一种适用于空间观测任务的实时多目标识别算法分享2021-12-21 1670
-
一种适用于可视电话的快速运动估计算法2010-03-01 656
-
GLONASS卫星信号的捕获及其仿真2012-04-13 1325
-
北斗全球系统明年将全面建成2019-12-10 2950
-
一种适用于软件无线电的数字调制与解调算法的详细说明2020-08-04 1090
-
导航不是GPS吗,有人用北斗吗?2020-09-08 4325
-
一种适用于FPGA实现的盲均衡算法2021-02-03 844
-
基于相控阵天线的卫星信号波束跟踪算法2021-05-29 1311
-
一种适用于动态场景的多层次地图构建算法2023-08-28 1256
-
双北斗时钟服务器、双北斗校时服务器、双北斗NTP授时服务器2025-01-22 920
全部0条评论

快来发表一下你的评论吧 !
