

一体化ROS智能驾驶小车及实训教学平台解决方案
描述
▍文章来源于康谋自动驾驶
在自动驾驶技术飞速发展的当下,一套兼顾 “实战开发” 与 “教学实训” 的智能小车方案,成为高校、职业院校及科研机构的核心需求。
今天,康谋带来的 ROS 智能驾驶小车整体方案,不仅具备专业级的硬件配置与软件架构,更配套完整的实训教学平台及教学资源,从 “硬件落地” 到 “教学实践”,一站式解决自动驾驶教学与开发痛点。
ROS 智能驾驶小车方案概述
整体架构:模块化设计,清晰可追溯
小车采用模块化架构设计,核心包含车架组件与阿克曼底盘,各传感器与核心部件布局合理,便于学生理解 “感知 - 决策 - 控制” 的硬件逻辑,也支持后期二次开发与部件替换,适配不同教学与实验需求。

智能驾驶小车整体示意图
硬件方案:多传感器融合,对标行业标准
硬件配置覆盖自动驾驶 “环境感知、定位导航、控制执行” 全流程,关键部件参数明确,性能可靠,具体如下:

底盘系统
- 运行速度:8km/h
- 尺寸:1320mm×785mm×490mm
- 轴距/轮距:600mm/665mm
- 轮胎直径:420mm
- 对外供电:48V/10A,24V/15A,12V/15A
- 通讯方式:CAN2.0B
- 整车质量:125kg
- 制动方式:电动
- 越障高度:90mm(空载)/60mm(满载)
- 最大负载:100kg

阿克曼底盘
感知系统
- 多线激光雷达:R550 PLUS(16线,测量距离70-150m,频率5-20Hz)
- 双目相机:Gemini Pro(深度范围0.25-2.5m,USB3.0接口)
- 毫米波雷达:大陆ARS408(探测距离0.2-250m,测速范围-400km/h~200km/h)
- RTK定位系统:华测CGI-430(多系统支持,RTK精度1cm+1ppm)
计算与显示系统
- 工控机:MIC-7700系列边缘计算平台
- 显示屏:10.1寸(HDMI接口,1080P分辨率)
辅助系统
- 交换机、拓展模块、路由器、支撑架等配件
软件方案:基于 Autoware,适配教学与开发
小车搭载定制化上位机,以开源 Autoware 框架为核心,完美满足 “教学” 与 “开发” 双重需求,具体功能包括:
智能驾驶模块化开发与教学:拆解自动驾驶核心模块,便于学生理解与实践;
自动驾驶感知开发与教学:支持视觉、激光雷达、毫米波雷达等单一 / 多源感知算法开发;
开源自动驾驶深度算法使用:直接调用 Autoware 框架内成熟算法,降低开发门槛;
CAN 通讯开发:实现上位机与底盘等硬件间的通讯调试,掌握车载通讯核心技术;
多传感器融合自动驾驶算法开发与使用:支持激光雷达 - 相机、毫米波雷达 - 相机等多模态数据融合,提升感知精度。

实训教学平台简介
为将 “理论” 与 “实践” 深度结合,方案配套完整的实训教学平台,集成至单一软件中,采用 Vue3 进行前端页面设计,分为教师端与学生端,实现 “教学管理 - 实验操作 - 数据反馈” 全流程覆盖。
实训教学功能
本平台为实训教学提供以下核心功能支持:
数据管理
支持多种传感器数据(视觉、毫米波雷达、激光雷达、超声波)读取、存储、回放与解析
传感器标定
集成opencalib标定工具,提供:
- 相机标定:获取内参标定及畸变矩阵
- Radar2Camera标定:地面坐标标定与联合标定
- Lidar2Camera标定:多传感器融合标定
故障设置模块
提供故障设置功能,前端可视化展示故障效果
传感器三维展示
支持传感器模型三维可视化,可进行模型组装选择,3D渲染展示传感器细节
教学管理功能
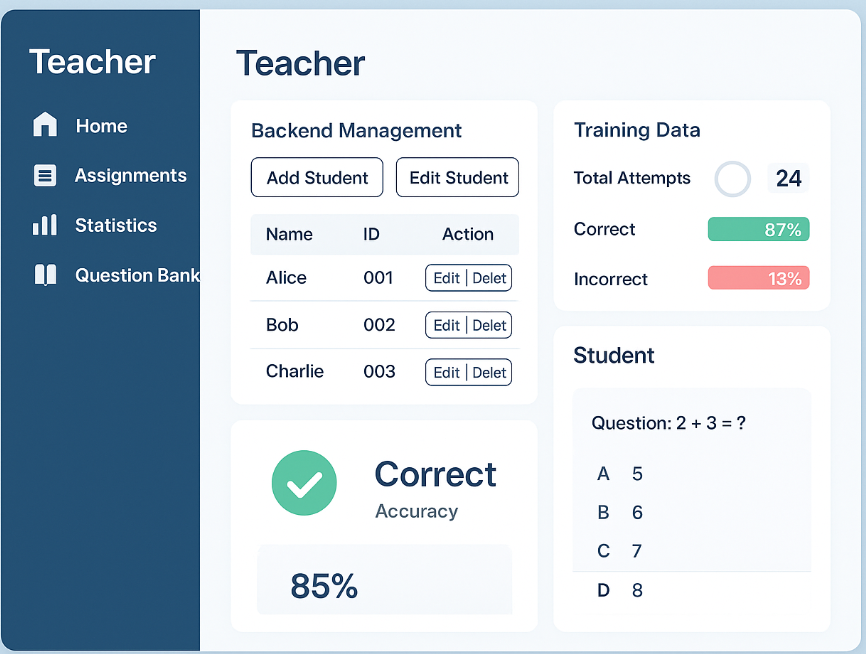
平台赋予教师端完整后台管理权限,同时为学生端提供清晰的学习反馈,实现高效教学管理:
教师端权限
支持添加 / 修改学生信息、批改作业、查看学生操作画面、发布题库任务、统计训练数据(训练次数、正确率、错误率)、管理训练工单(发布任务、查看完成情况);
学生端功能
接收教师批改结果、查看训练统计数据(如答题正确率)、完成教师发布的实训任务,形成 “学习 - 实践 - 反馈” 闭环。
教学材料与使用手册
方案提供体系化教学资源与详细使用手册,确保教师 “易教”、学生 “易学”,具体配置如下:
教材体系
- 配套教材:不少于250页,包含30个以上工作任务
- 教学PPT:30个以上,总页数不少于400页
- 教师手册:30个以上,配套每个工作任务
- 学生工作页:30个以上,配套每个工作任务
教学视频
- 16个以上辅助教学视频
- 总时长不少于180分钟
试题库
- 包含判断题、单选题、多选题
- 总数不少于260道
交付案例
无人船多模态感知平台
本方案采用BRCKplus多传感器数据采集系统,通过集成6个视觉摄像头与1个激光雷达传感器,构建无人船的多模态感知平台。该系统利用GNSS实现各传感器间的高精度时间同步,旨在精确采集与重建海面场景数据。

多传感器环境感知体系
本方案核心为BRCKplus多传感器数据采集系统,集成了毫米波雷达、激光雷达和摄像头等多种传感器,构建了全面的环境感知数据采集体系。在此基础上,方案采用ADTF作为上位机开发工具,实现了对多源数据的集中管理、可视化与处理。

总结
本 ROS 智能驾驶小车方案,以 “专业硬件 + 开源软件 + 完整实训平台 + 体系化教学资源” 为核心,既满足高校、职业院校自动驾驶相关专业的教学需求,也可支撑科研机构的算法开发与实验验证。
从 “硬件认知” 到 “算法落地”,从 “教师教学” 到 “学生实践”,可一站式解决自动驾驶教学与开发痛点!
-
经世智能赋能高校实训:复合机器人一体化控制调试实训平台!2026-05-13 1102
-
光机电气一体化控制实训系统有哪些技术参数2021-09-26 1936
-
ZN-01GJD光机电气一体化控制实训系统装置的构成2021-09-02 1127
-
ZN-IGZ06机电一体化综合实训考核设备有哪些技术参数2021-08-10 2300
-
光继电器一体化控制实训系统是由哪些部分组成的?2021-07-13 2030
-
QY-JDYT05光机电一体化控制实训装置由哪些部分组成的?2021-07-09 1975
-
光机电气一体化控制实训系统2021-07-02 1862
-
一种机器人光机电一体化分拣实训系统2021-07-01 2290
-
EW一体化平台解决方案2016-12-25 1106
全部0条评论

快来发表一下你的评论吧 !
