

如何解决角度误差过大而无法精确定位
描述
汽车航位推算(DR)导航系统采用一个陀螺仪(gyro)来推算车辆的即时航向。借助该信息再加上行驶的距离,导航系统可以正确确定车辆的位置,即使卫星信号因拥挤的城区环境或隧道而受阻时亦是如此。在 DR 导航中使用陀螺仪的一个重大挑战是,卫星信号可能会丢失较长时间,结果使累积角度误差过大而无法精确定位车辆。本文为这个问题提出了一种简单的解决办法。
DR 导航的工作原理
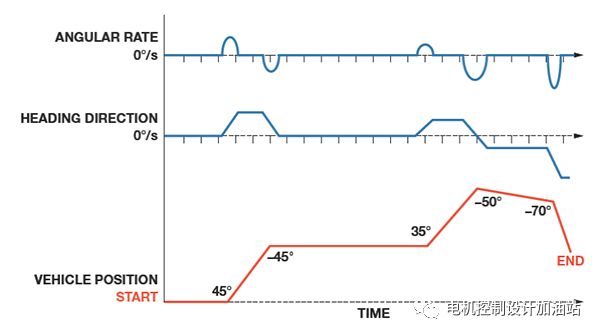
图 1 所示为 DR 导航的基本工作原理。一个陀螺仪测量车辆的旋转速率,单位为度/秒。代表车辆即时航向的角度通过计算旋转速率的时间积分而求得。结合航向和行驶距离,可以确定车辆的位置,如图中的红线所示。
使用数字陀螺仪时,积分速率可以表示为速率样本和与采样间隔之积:
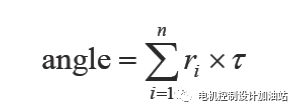
其中,ri 为陀螺仪检测到的速率,n 为样本数,τ 为采样间隔。随时间累积的角度误差可以表示为:
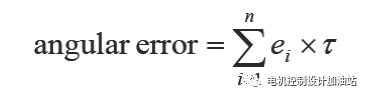
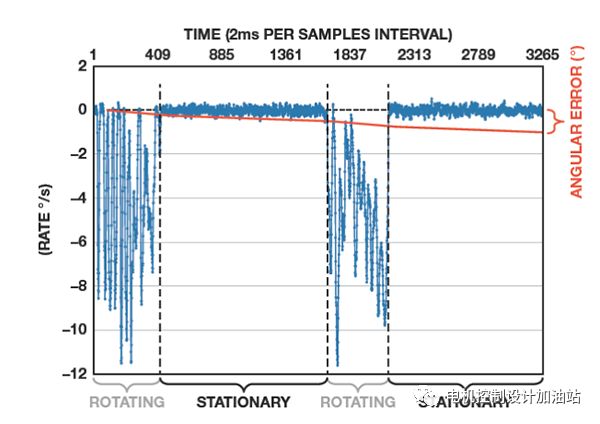
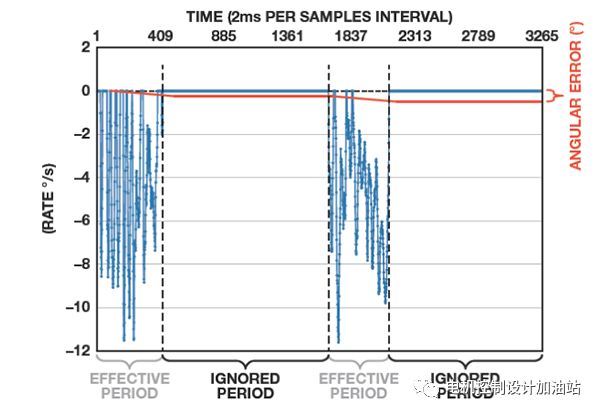
其中,ei 为各样本的速率误差, n 为样本数, τ 为采样间隔。根据该公式,随着所需积分时间变长,累积误差变大,如图 2所示。这些速率样本(用带 ADXRS810 高性能角速率传感器的评估板测得)模拟的是共含有 3300 个速率样本的 DR 导航系统。蓝线表示陀螺仪速率样本;红线表示累积角度误差。显然,累积角度误差随时间而变大。
用低通滤波器(LPF)缩短积分时间
降低角度误差的传统方法将重点放在减小 en上,但当今的数字陀 螺仪的速率误差规格已处于非常低的水平。例如,ADXRS810 的灵敏度为 80 LSB/°/秒,失调为±2°/秒,抗冲击性为 0.03°/秒/g ,改善空间有限。另外,en 的补偿算法非常复杂。与诸如电子稳定控制(ESC)等其他应用相比,DR 导航系统中的陀螺仪可以长期运行,例如车辆行驶通过长隧道时 GPS 信号就不会丢失。在 DR 导航应用中,较长的运行时间会导致角度误差变大。
如果可以缩短积分时间,则可以显著降低累积角度误差。当陀螺仪不旋转时,速率输出较小,但因陀螺仪噪声的影响,输出不是零。ADXRS810 具有超低的陀螺仪噪声和超高的灵敏度,只需设置相应的阈值,即可轻松过滤掉数字域中的噪声。这一过程等效于低通滤波,因为与旋转导致的速率输出相比,陀螺仪速率噪声处于高频区。
图 3 所示为图 2 的 LPF 版本,其中,小于 1°/s 的所有速率样本均归零处理,因此在速率积分时忽略不计。剩下的积分时间,被认为是有效积分时间,只相当于总积分时间的 16%左右。如此可以大幅缩短积分时间。结果,累积角度误差也显著降低,如图中的红线所示。
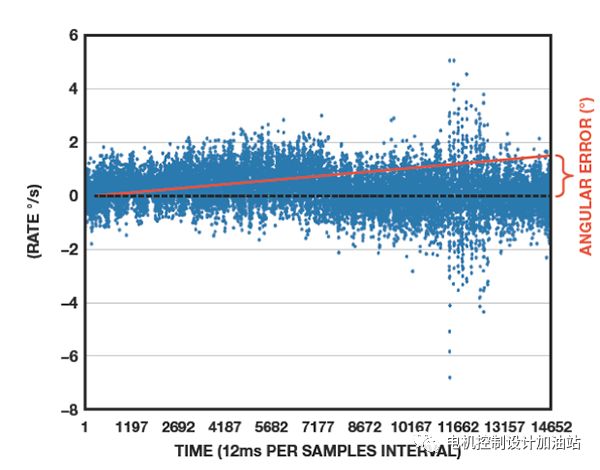
在实际应用中,车辆方向盘一般位于零度处。因此,可以通过忽略来减少陀螺仪速率的有效积分时间,如图 3 所示实验中所做的那样。图 4 所示为来自真实车载测试的陀螺仪速率样本。
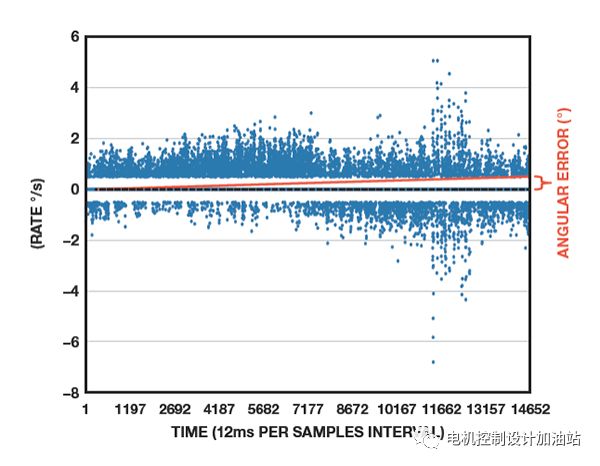
在隧道中行驶大约 180 秒,则需要 180 秒的速率积分时间。如果不使用 LPF 过程,则 180 秒内累积的误差可能高达 4°,该值太大,导致无法正确确定车辆在隧道中的位置。采用 LPF过程,将阈值设为 0.5°/秒,则有效积分时间缩短至 84 秒,减幅达 53%左右。累积误差降至约 0.5°,如图 5 所示。设置 LPF阈值时,可以根据具体应用所需要的精度来定。
结论
如今的数字陀螺仪具有出色的规格特性,因此,其性能的提升余地有限。在车载 DR 导航系统以及要求长积分时间的其他应用中,通过设置 LPF 阈值来缩短积分时间是一种简单但有效的精度提升方法。
ADXRS810 高性能、低成本数字陀螺仪采用 ADI 公司的新型MEMS 技术,是车载 DR 导航应用的上佳选择。该陀螺仪采用超小型封装,具有低失调、低噪声和高速率灵敏度的特点。采用芯片集成温度补偿技术,无需使用外部温度传感器,同时简化了温度补偿算法。其超高的抗冲击和抗振动能力对汽车应用具有十分重要的意义。
作者简介
Ben Wang [ben.wang@analog.com]是 ADI 公司中国深圳的现场应用工程师(FAE),毕业于湖南大学。他于 2009 年 6 月加入 ADI 公司,此前在National Semiconductor 工作过六年。
-
精确测距或者精确定位2017-05-03 5818
-
基于Verilog的车牌精确定位2019-03-03 5329
-
伺服系统定位误差形成的原因?如何解决?2023-03-08 1762
-
使用步进电机精确定位2010-01-09 528
-
无线室内精确定位系统设计的几大要点分享2018-01-11 9496
-
有辨别力的精确定位器2022-08-04 632
-
监狱人员UWB精确定位系统2022-09-27 4232
-
隧道施工人员精确定位系统介绍2022-09-29 4232
-
隧道人员定位系统:区域定位、ZigBee3米精确定位系统与UWB30厘米精确定位2023-12-04 1791
-
晶振频率偏差过大怎么办?教你如何解决晶振频率偏差过大问题2023-12-18 4131
-
伺服位置误差大的原因 怎么解决伺服电机定位误差过大的问题?2023-12-25 10788
-
伺服电机的精确定位方法2024-01-20 2293
-
隧道zigbee精确定位系统优势及功能2024-07-01 1231
-
服务提供商数据在精确定位中的应用2024-07-18 1194
-
电缆故障预警与精确定位装置所涉及的技术原理2025-08-20 1197
全部0条评论

快来发表一下你的评论吧 !
