

《高度灵活的L4计算平台》的主题演讲
描述
2018年6月21-22日,由布谷鸟科技、佐智汽车主办,艾拉比智能、ADI亚德诺半导体、索喜科技赞助支持的“2018第二届智能座舱与智能驾驶峰会”在深圳福田区绿景锦江酒店举办。深圳布谷鸟科技有限公司的副总裁戴智翔在会上做了《高度灵活的L4计算平台》的主题演讲。
布谷鸟科技 戴智翔
主持人:感谢大家参加布谷鸟2018第二届智能座舱与智能驾驶峰会。今天是智能驾驶专场,上午有8位演讲嘉宾给我们带来精彩的演讲。第一位是来自深圳布谷鸟科技有限公司的副总裁戴智翔戴总。他是布谷鸟智能驾驶事业部的总经理、高级工程师,深圳市科技创新奖获得者,曾获得十多项国家发明专利,拥有北京大学MBA学位,在管理和技术上都有很丰富的经验。
戴智翔:大家上午好!今天分享的主题是“高度灵活的L4计算平台”。布谷鸟始终聚焦在汽车计算平台的研发和量产上,今天的演讲重点智能驾驶计算平台。
布谷鸟智能驾驶产品有两种:一是L2计算平台,到2018年12月份就能达到SOP的水平;二是L4计算平台在快速演进,架构还有样机基本成型。我们为什么说L2和L4,没提及L3?L3属于中间状态,在今天的报告中将和大家一起分享我们对L3的思考。
SAE对智能驾驶的分级,重点关注L3和L4,它们最大的区别是在整个系统失效的情况下,谁接手自动驾驶?比如在高速上,自动驾驶失控,怎么办?L3的责任是驾驶员,到L4就意味着需要系统来接管。这意味着备份很重要,L3在有异常情况发生的时候,人接手比较困难,危险常常就是一瞬间的事情。这是今年上半年Uber自动驾驶的视频,我们可以看到当时的情况。
UBER事故,从外部和内部两个视角看,外部出现事故时间非常短,基本上就是四五秒的时间。Uber有专门的测试员在驾驶座位上,系安全带,但事故发生是瞬间的事。人类从事故发生,到反应过来,并刹住车可能需要十几秒,这种情况下驾驶员无法阻止事故的发生。所以L3面对紧急事故时,人类无法在短时间里接手自动驾驶系统。实际上对人来说,L3比L2更累,大家清楚L2只是辅助驾驶,在个别维度辅助人,到了L3级别,对人类双手、双脚解放的程度很高,然而对人的注意力解放程度并没有减弱。
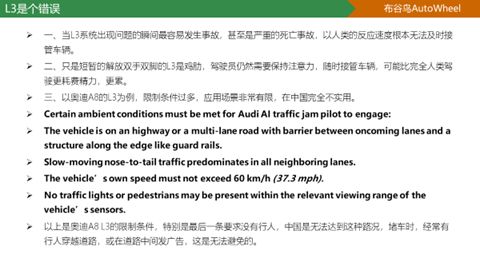
2017年8月份,在美国的CES上,奥迪发布了A8,号称第一款L3量产的车型。A8的L3智能驾驶的条件限制非常多,实现其功能基本上不可能,比如说要求路边的实线清晰度高,清晰的护栏,同时左右车道分开,甚至要求在行驶的路上没有行人,在中国基本不存在这样的环境。所以新奥迪A8没有在中国推广。
L2更多的聚焦功能,L3更多聚焦到场景。现在不少的厂商就智能驾驶究竟从哪个级别开始商业化都在探讨。我们认为封闭路段应该是最可能的,然后逐步实现城市路段、无标识的农村路段等。先实现四五个标准场景,前期在标准场景和封闭园区做自动驾驶L4的切入。

AutoWheel是布谷鸟智能驾驶的商标。我们更多的按照行业大势往前走,计算平台硬件、软件以ISO26262功能安全为核心设计原则,算法和软件后期可迭代开发。整个公司以量产为核心目标,前期阶段帮客户搭样车。
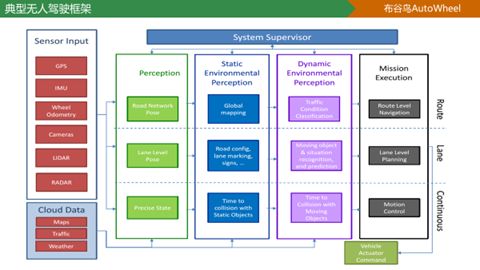
下面是无人驾驶的典型框架,左边是传感器的部分,包括GPS、雷达等,下面是远程的车联网部分,右边有感知,包括动态和静态感知,以及决策执行。我们的硬件计算平台涵盖这四部分。我们认为,只有功能强大的基础硬件,未来的软件升级和功能迭代才能在硬件平台上快速演进。
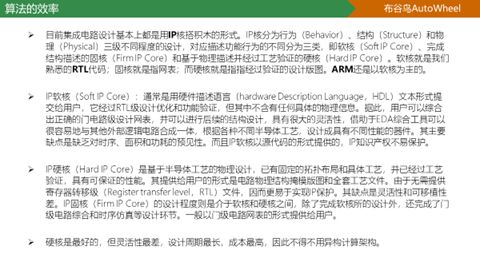
算法效率依托的是CPU或者基础计算平台,当前的集成电路设计都是IP和搭积木的方式,从描述行为基本上分为三类:软核、固核和硬核。软核灵活性高,但是它的总体效率比较差。同时IP软核以原代码提供,知识产权不受保护。
硬核的好处是响应速度非常快,但是灵活性欠缺,像我们专用的芯片一样,有它专门的方向。硬核的设计周期比较长,这个行业又在快速前进,行业当前很多采用异构的计算架构。
CPU、GPU、FPGA架构的对比
大家议论比较多的CPU、GPU、FPGA等,到底我们采用哪种架构?以英伟达为代表的GPU厂商,它的浮点运算比较强,前端部分用GPU比较多。FPGA的好处是非常灵活、高效率,决策和传感器融合用得较多,现在很多厂商都会用FPGA芯片。CPU是应用比较广泛的。
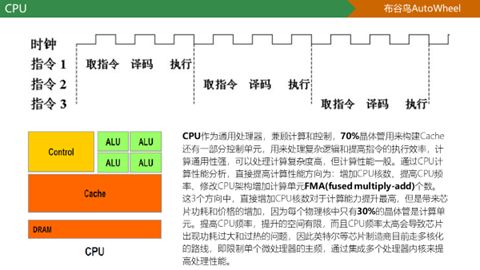
通用的CPU架构有70%的晶体管做存储,相对来说它的运算单元比较少,另外一块ALU是它的运算单元,相对来说占比有限。英特尔芯片制造厂商都是走多核路线。运算能力有限的情况下,要提高运算能力只能走多核,通过集成多个处理器内核提升处理性能。
CISC和RISC是两种微处理的架构,CISC结构的计算机数据线和指令线分时复用,RISC更多的采用数据和指令分离的方式。现在ARM架构更多采用RISC的方式,RISC的设计技术更适用于专用机,像家居、汽车里面ARM架构。
CISC计算机的指令系统丰富,有专用指令来完成特定的功能。更多适用于通用机,像家用的X86架构。现在X86体系表面接受CISC指令,实际上通过译码器转化为RISC,它的底层运行的都是RISC指令。ARM是当前做智能驾驶嵌入系统的主流,软核在运行ADAS系统时速度很慢。
MobileyeEyeQ4,用了4个MIPS,大CPU做主控和算法调度,以及一个MIPS,小CPU做外向控制,集成了10个向量处理器。整个居于饱和的设计,将系统集成在芯片里,当前国内大多数企业也是采用这种方式。效率不会特别高。
GPU是逻辑控制单元对应多个计算单元,同CPU一样也是执行指令、指令译码、在指令执行的过程中,计算单元才会发挥作用。相对来说它的逻辑控制单元比CPU简单,所以它整个算法本身的串行处理会导致GPU的浮点计算能力显著降低。
FPGA不采用指令和软件,是一个软硬集合的器件。灵活性强。FPGA通过硬件性的描述语言来实现逻辑电路的自编程,由于算法是定制的,相比CPU和GPU会省很多过程,使用周期执行比较快,整个计算效率高于CPU和GPU。
现在FPGA也有一个问题,它主要是做整数的运算,现在传感器、图像、视频更多以小数为主,这时候通常要用DSP的硬核来执行该运算,导致FPGA的成本非常高,而且现在的FPGA更多的融入了DSP、CPU。

L4级别自动驾驶的计算架构
下面是典型L4的计算架构,已经有不少的厂商采用该架构,它的核心采用英特尔的一个处理器加一个加速卡,同时做了上下部分的备份,中间通过以太网交换实现架构的提升。
以太网交换扮演两个作用:一是备份,当一套系统有异常,另外一套系统正常工作。当需要提高运算能力时,这两部分可以串行加在一起,提升运算能力,性能达到行业相当高的水平。
该架构的处理和决策系统的算法,感知系统完善、成熟,特点是成本非常高,以10万美金为等级的金额来推进,一般的厂商很难量产化。
英特尔采用典型L4的架构,Waymo,无论是视觉还是雷达,全部接入计算平台。对稳定性、可靠性做了不少的验证,有财力的企业采用英特尔至强的架构较多。百度一部分使用至强处理器加一个硬件加速卡,有时候也会用两块,根据不同的场景要求。
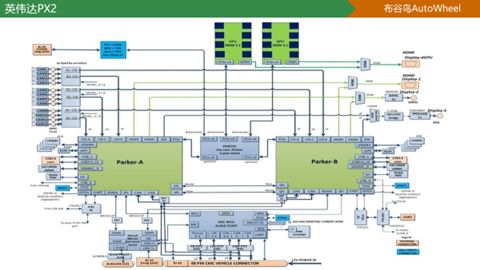
英伟达的PX2,从GPU到Parker-A,Parker-B,都是对称式设计。无论是采用至强还是英特尔,以太网交换这块,两个经典的架构都使用了相同设计。英伟达的整个方向,以GPU为核心,对点云的数据处理和决策关注比较少,通用的计算性能比较差。整个架构仅仅用了ASIL-D级MCU提升功能安全,而整体的功能安全水平没有提升。我们认为它更多的是偏初期的,离通常的量产还有一段路要走。
去年博世曾讲,博世聚焦在L1-L3,L4没有更多的消息发布出来。因为L2及以下更多是零配件业务,到L4以上更多是运营业务,对博世这类厂商来说是不是超出他的业务范畴,我们不得而知。
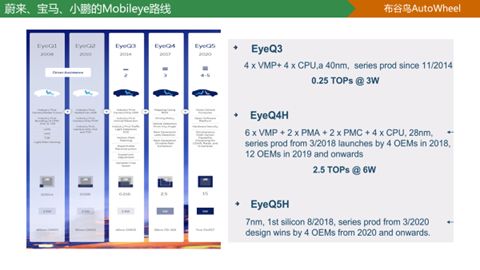
蔚来、宝马、小鹏都是采用Mobileye的路线,和博世走的路线不同。他们比较激进,更多关注GPU,我们看到传统的博世更关注计算和安全,本质上有区别的。Mobileye更多关注软件,对硬件和功能安全关注很少。它最新的EyeQ5方案,前面使用一颗EyeQ5芯片做视觉,后面做决策和执行,后面再用英特尔的产品,整个强调的都是计算,通过GPU+CPU实现整个架构,在安全方面没有做更多的考虑。
去年开始我们对瑞萨系列进行研发,它全球只有4块板,我们拿到其中一块,官方构建的设计用4块RCar H3,用以太网关交换来实现中间两块的交换。它是用HAD的处理芯片来做控制部分,这样的架构我们认为接近能够量产的,在功能安全和性能上,在行业里比较领先。RCar H3价格还没有出来,但是成本相对高昂,安全和图形处理,我们认为它达到了比较好的水平。
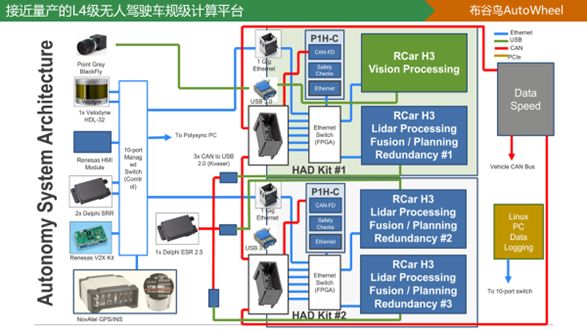
基于这种架构,所有的芯片都是ASIL-B以上的芯片,至少总体上达到了ASIL-B的水平。虽然软件会影响整体系统的稳定性,但是硬件架构具备这样的条件,在此基础上,向上通过软件不断完善,可以做好功能安全和视觉的灵活运算要求。
布谷鸟的Auto Wheel系统
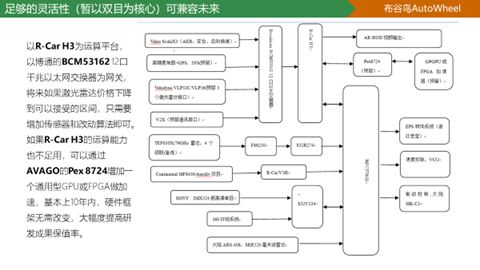
基于RCar H3的布谷鸟Auto Wheel,以一套独立的L2系统替代了三套H3的系统,降低系统的成本和复杂度,提升可靠性。我们在前面用了一个博通BCM5316212口千兆以太网交换器为网关,高精度地图等都通过它接入,控制汽车行驶的是MPC5746,也支持AUTOSAR架构。
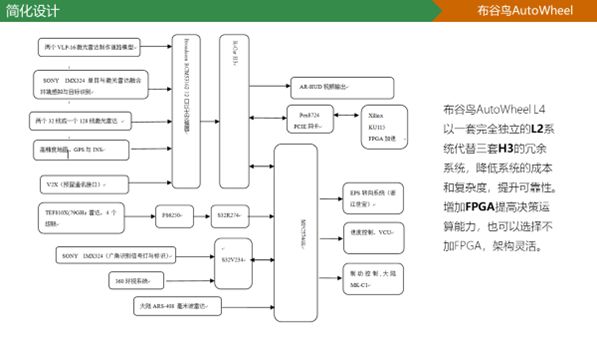
在这种架构里,视觉部分容易升级,在下面是MPC,里面跑AUTOSAR,对汽车安全控制不用过多担心,上面的视觉系统一旦出现异常,传感器也会进入到MPC里面来。哪怕在高速上出了故障也可以停到路边来, 这是L4和L3的最大区别。在系统失效的时候,不用人接手,至少能停到紧急停车带,显著降低事故的发生。
另外一个版本的思考,基于原有的架构,增加了双目摄像头,接入RCar H3,整个架构与前版本没有变化,加入双目后,对整个视觉系统有较大的提升。同时以博通BCM53162以太交换器为核心,随着时间推移, RCar H3运算能力不够强,我们通过AVAGO Pex 8724芯片接入GPU或者FPGA来做加速,这个硬件架构未来10年左右我们认为是符合未来需求的。
对于计算平台厂商来说,我们既得考虑现在,也要考虑未来的兼容性,系统不断升级,需要基本硬件的支撑。L4计算平台,通过这样的架构,我们认为实现了整体布局。对车厂来说是比较不错的架构,特别是对于关注量产的企业。
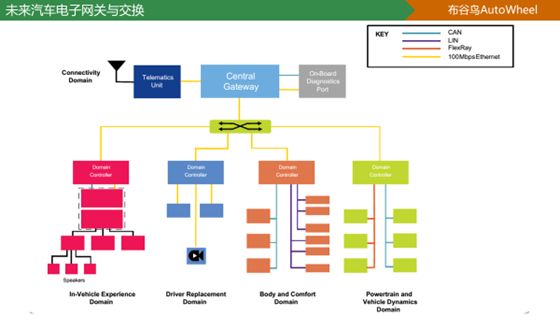
这是NXP汽车以太网骨干,和汽车行业的朋友聊到,说到现在很多厂商开始用以太网。
这张图清晰的表达了未来汽车电子架构,中间绿色的是以太交换,通过以太交换接入域控制器。布谷鸟关注两块,一是智能驾驶域,一是智能座舱域,中间通过以太网传输,它的速度会显著提升。
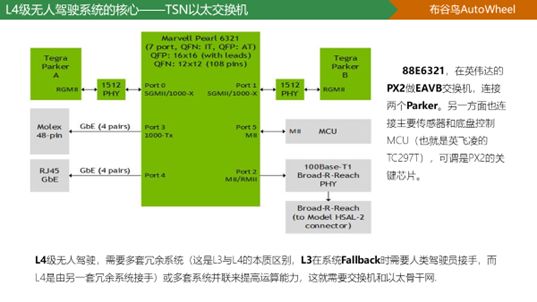
这是L4无人驾驶系统核心部件,TSN以太交换机,用英伟达PX2做EAVB交换机,连接两个Parker。我们没有过多的考虑L3,因为L4以下,对车厂来说,通过零部件减配,借L4的平台可以达到L3的水平,同时保留向上升级到 L4的能力。
以上就是我今天的演讲。感谢大家!
-
华为在MWC 2026正式发布核心网AN L4目标解决方案CORESpirit2026-03-05 721
-
NVIDIA与Uber合作推进全球L4级自动驾驶移动出行网络2025-11-03 1608
-
华为AI重塑核心网运维模式助力运营商实现数智化转型,迈向AN L42025-03-08 1941
-
华为赵振龙亮相MWC 2025并发表主题演讲2025-03-07 1458
-
l4级别自动驾驶的特点是什么2024-10-22 3895
-
L4算法公司如何助力城市NOA加速落地?2024-09-04 5102
-
L0与L4双机采用SPI DMA循环模式通信过程中,L4接收数据错位了的原因?2024-04-23 382
-
华为Net Master+高清网络数字地图,加速迈向L4自智网络2024-04-19 1283
-
GTC 2023主题直播:NVIDIA针对Al视频工作负载的L42023-03-22 1793
-
NVIDIA助力云骥智行加速L4级自动驾驶的大规模量产落地2022-04-02 2938
-
L4微内核技术浅析2021-04-07 1228
-
文远知行WeRide首发最新的L4级自动驾驶车型日产LEAF 22019-03-19 1944
-
请问STM32 L4系列哪个功耗更低?2019-02-22 6393
-
欧洲初创公司AImotive推出能实现L4/L5自动驾驶的技术平台2018-07-20 10608
全部0条评论

快来发表一下你的评论吧 !
