

AFS自适应前照灯系统的详细原理介绍及与传统前灯相比有什么优势?
描述
AFS是指能自动改变两种以上的光型以适应车辆行驶条件变化的前照灯系统。AFS是目前国际在车灯照明领域最新的技术之一,同时也是一个和行车安全息息相关的主动式安全系统。
AFS的研发背景
传统的前照灯系统是由:近光灯、远光灯、行驶灯和前雾灯组合而成。在城市道路行驶并且限速的情况下,主要采用近光;在乡间道路或者高速公路上高速行驶的时候,主要采用远光;雾天行驶的时候,应该打开雾灯;白天行驶,应该打开行驶灯(欧洲标准)。
但是实际的使用中,传统的前照灯系统存在着诸多问题。例如,现有近光灯在近距离上的照明效果很不好,特别是在交通状况比较复杂的市区,经常会有很多司机在晚上将近光灯、远光灯和前雾灯统统打开;车辆在转弯的时候也存在照明的暗区,严重影响了司机对弯道上障碍的判断;车辆在雨天行驶的时候,地面积水反射前灯的光线,产生反射眩光等等。
欧洲汽车照明研究机构曾经就此作过做专项调查,结果显示,欧洲司机们最希望改善的是阴雨天气积水路面的照明,排在第二位的是乡村公路的照明,接下来依次是弯道照明、高速公路照明和市区照明。
上述这些问题的存在,就使得研制一种具有多种照明功能的前照灯成为必要,并且这些功能的切换,出于安全上的考虑,必须是自动实现的。所以欧洲和日本相继研制了这种自动适应车辆行驶状态的前照灯系统——AFS(自适应前照灯系统)。
AFS实现的功能
阴雨天气的照明
如图1图2所示,阴雨天气,地面的积水会将行驶车辆打在地面上的光线,反射至对面会车司机的眼睛中,使其目眩,进而可能造成交通事故。
AFS有效的解决方法是:前灯发出如图所示的特殊光型,减弱地面可能对会车产生眩光的区域的光强。
图1 雨天积水反射的AFS光线(侧视)
雨天积水对AFS光线的反射(俯视)
乡村道路的照明
在环境照明不好的乡村道路上高速行驶的车辆,需要的是照得远,照得宽的前照灯。同时AFS也不能产生使对面会车司机眩目的光线。
转弯道路的照明
如图3所示,传统前灯的光线因为和车辆行驶方向保持着一致,所以不可避免的存在照明的暗区。一旦在弯道上存在障碍物,极易因为司机对其准备不足,引发交通事故。
AFS解决的方法是:车辆在进入弯道时,产生如图4所示旋转的光型,给弯道以足够的照明。
图3 传统前灯的弯道照明问题
图4 AFS的弯道旋转照明
高速公路的照明
如图5所示,车辆在高速公路上行驶,因为具有极高的车速,所以需要前照灯比乡村道路照得更远,照得更宽。而传统的前灯却存在着高速公路上照明不足的问题。
AFS采用了如图6所示更为宽广的光型解决这一问题。
图5 现有前灯在高速公路照明的问题
图6 AFS在高速公路上的照明
城市道路的照明
城市中道路复杂、狭窄。传统前照灯近光如图7所示,因为光型比较狭长,所以不能满足城市道路照明的要求。
AFS在考虑到车辆市区行驶速度受到限制的情况下,可以产生如图8所示的比较宽阔的光型,有效地避免了与岔路中突然出现的行人、车辆可能发生的交通事故。
图7 传统前灯近光的照明的问题
图8 AFS城市道路的照明
AFS的工作原理
AFS是一个由传感器组、传输通路、处理器和执行机构组成的系统。由于需要对多种车辆行驶状态做出综合判断,客观上决定了AFS是一个多输入多输出复杂的系统。
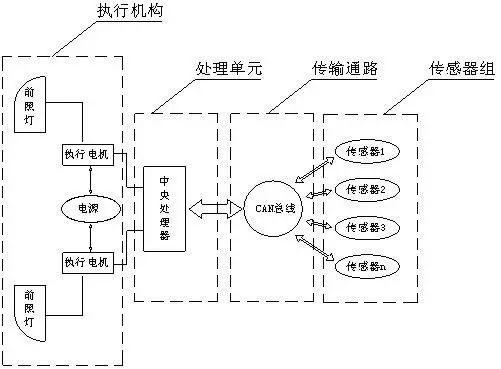
要实现不同的功能,AFS必须要从不同的传感器取得不同的车辆行驶信息。比如,为了实现弯道旋转照明的功能,除了要从车速传感器获取车速、方向盘角度传感器获取方向盘转角、车身高度传感器获得车身倾斜角度以外,还必须通过一些特殊的传感器,获取车辆实际转向角度的信息;为了实现阴雨天照明的功能,就要从湿度传感器获得是否阴雨的信息……
因为在通常的情况下,AFS所需获得部分信息也被其他的控制系统采用,即AFS实际上要和其他的系统共用一些传感器,所以,必须通过总线这一传输通路以后,才能实现这些传感器信息的共享。
AFS接受到的信息,除了车速,车身转角和车身倾斜角等等少数信息是可以定量的以外,其他传感器发回的信息大多只能到定性的程度。诸如,地面平不平,雨下得大不大等等车身之外的环境信息,都是不能精确量化的。这就使得AFS的中央处理器能够进行模糊的判断。并且很多信息之间是相互关联的。比如,在阴雨天气,路面积水的情况下,车辆的转角和晴天相比有极大的差异……AFS的中央处理器不仅要做模糊的判断,而且还要随着这种环境的改变不断的修整系统参数,这使得AFS最终成为一个自适应的模糊系统。
AFS的执行机构是由一系列的马达和光学机构组成的。一般有投射式前照灯,对前灯垂直角度进行调整的调高马达,对前灯水平角度进行调整的旋转马达,对基本光型进行调整的可移动光栅,此外还有一些附加灯如角灯等等。
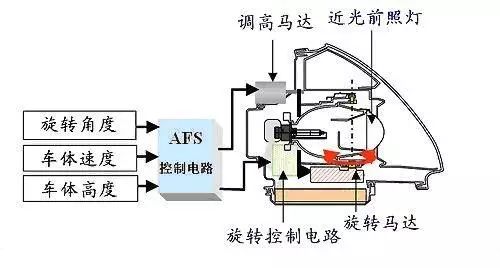
以日本DENSO公司的AFS为例,进行简要的说明:
DENSO公司的AFS系统目前只能实现弯道照明的功能,所以其系统比较的简单。系统从方向盘角度传感器、车体速度传感器、车身高度位移传感器分别取得转向轮旋转角度、车体速度和车身倾斜度的精确信息。其中角度和速度信息通过中央控制电路精确计算以后产生输出信号控制旋转马达对前灯(投射式)进行水平旋转,倾斜度信息控制调高马达对前灯进行垂直旋转。
AFS系统功能实现的技术基础
目前研发的AFS系统的难点就是缺乏有效、廉价的传感器能对基本道路状况的做出判断。要完成路面积水、转弯道路、高速公路、乡村道路和城市道路的综合识别,即便是采用下一代基于CCD的图像识别技术还是一个不小的挑战。
所以时下量产的AFS系统都是运用了间接判断,有限的实现个别功能。如采用车身高度传感器感知车身的纵倾角,使前灯保持和路面水平;采用方向盘转角传感器感知前轮转角,结合车速判断道路的弯曲状况,实现弯道旋转的功能;采用自动雨刮的湿度传感器感知雨量,实现前灯反光遮挡的功能。
车身纵倾调光功能
车身会因为前后负载的不同,改变纵倾的角度,安装在车身上的车灯射出光线的角度也会发生改变,对夜间行车安全产生不利的影响。
如图所示,上部是正常的前灯出射角度和照明范围,中下部分别是后倾和前倾情况下的前灯角度和照明范围,其差异是非常明显的。另外,车辆的加速和减速也能改变车身的纵倾角。
采用安装在悬架和车身上的车身高度传感器,获取前轴和后轴的高度变化量,并依据轴距计算车身纵倾角度。车身纵倾角度的变化量,就是前灯光轴角度的变化量,通过调光电机的运作,反向调整此角度变化,就可以使光轴回复到原先的状态,保持水平。
弯道旋转功能
传统国标对前灯照明有很严格的要求。25m测试屏上实测到前灯(单灯近光)的等照度曲线(0.5~31lux),经由计算各种不同能量的光线得到在空间中生成的光网,下图红线所围成的空间区域就是前灯(单灯近光)1lux的光网,则双灯能够照亮路面上蓝线围成的区域。
无疑此近光完全满足国标的配光要求,但这并不能保证驾驶员能发现弯道上近在咫尺的危险,因为横向固定光轴的传统前灯存在着盲区。如果前近光灯能够提前旋转一个角度,左灯旋转15度,右灯旋转9度,可见区域就能覆盖大半个转弯半径37m左右的弯道,从而提早的发现道路上存在的危险,应对处理。
弯道上发现危机最极端的应对措施就是制动,前灯需要旋转的角度就是要保证这个有效的制动距离。一般来说从发现危机、踩下刹车到制动器启动需要1.5秒的时间,这段时间车辆以初始速度行驶;制动器工作后,如不出现甩尾、抱死的情况,其制动距离大致和直线制动相同。二者相加,所需的距离必须要在前灯旋转后的照明区域内。
阴雨天灯光遮挡功能
阴雨、坏天气下的照明一直是影响夜间行车安全的主要因素,恐怕很多人都会有被的前灯反光晃倒的经历。车辆前灯分为远光和近光的原因,就是因为近光灯能有效避免光线直射到对面会车驾驶员的眼中,但在路面积水的状况下,这种精心的设计完全失效。
所以AFS具备功能首位的就是坏天气下的照明,即将经过反射后射进会车的光线(红色区域)遮挡。对应到25m测试屏等照度曲线上的遮挡范围见图11的左下方的白色区域。
目前尚未接触到能够感知路面积水的传感器,只是听说可以采用自动雨刮的雨量传感器替代。遮挡需根据反射光线逆推到等照度曲线,并根据前灯的实际配光效果作细致的调整。
-
AEKD - AFLLIGHT1自适应前照灯模拟工具概述2026-06-28 102
-
探索AEKD - AFL001:自适应前照灯系统开发利器2026-06-27 449
-
环境光传感芯片ALS-AK510在汽车自适应前照灯系统中的应用2023-07-14 1872
-
自适应前照灯控制系统2021-07-09 1541
-
何谓自适应前照灯控制系统?其有何功能?2021-06-11 7036
-
中国汽车前照灯智能自适应照明系统的AFS大灯渗透率远高于ADB大灯2020-11-26 5564
-
汽车前照灯随动转向系统AFS是如何控制车灯方向的2020-03-07 10298
-
关于自适应前照灯系统的性能分析2019-09-26 3719
-
怎么设计嵌入式系统的自适应前照灯系统?2019-08-29 1703
-
LED前照灯和自适应汽车照明的当前发展回顾2019-07-12 3242
-
自适应前照灯系统AFS可以感应路况和车辆方向优化照明模式提高驾驶员夜间能见度2018-05-30 1563
-
解读NCV70522汽车自适应前照灯系统电路2014-12-29 1959
-
自适应前照灯系统(AFS)ECU的开发2011-06-07 1718
-
自适应前照灯控制系统(AFS)原理介绍2010-03-11 3220
全部0条评论

快来发表一下你的评论吧 !
