

一种基于前馈控制的平均电流控制方案
电子说
描述
摘要:
在传统平均电流控制电压环路基础上,提出了一种基于前馈控制的平均电流控制方案,电压环加入负载前馈控制和电网电压前馈控制,减小直流侧电压超调量;电流环采用误差迭代PI算法,实现无静差调节,优化三相VIENNA整流器的动态响应。所提出的负载前馈变量仅在负载阶跃时更新,在稳态时保持恒定。另外,本文对频域响应特性进行分析并通过仿真加以验证。
0 引言
随着半导体器件的飞速发展,高性能的整流拓扑也应运而生,VIENNA整流器由于其高效的三级结构而被提出,并广泛应用于电动汽车、航空航天等要求功率因数较高且线路电流谐波失真较低的场合。
传统平均电流控制稳定性好,电压外环用于调节输出电压,电流内环按电压外环输出的电流指令控制状态空间平均电感电流,使电流快速跟踪电压相位[1]。这种控制方案虽然可以获得单位功率运行且总谐波失真较低,但是PI环节控制器运算量大,导致输出电压动态响应较差。当负载突增时,会导致输出电压偏移,甚至系统失稳。
目前,优化VIENNA整流器平均电流控制的动态性能的方法主要有以下几种。文献[2]提出一种新型的电流前馈平均电流控制模式,推导低通滤波器的增益来加快电压环响应,但网侧电压不稳定时,滤波器的设置比较困难;文献[3]采用直接功率控制提高了系统的动态性能,但是计算较为复杂;文献[4]提出了基于扰动观测器的前馈控制,在负载波动或是网侧电压波动时表现出良好的动态性能。
本文在传统平均电流控制的基础上加入前馈控制策略,进一步优化系统的动态性能。提出的前馈控制计算中需要对负载电流采样,继而求出前馈变量值。同时,采用误差迭代PI算法代替传统的PI算法,以实现电流内环无静差调节。
1 传统平均电流模式控制
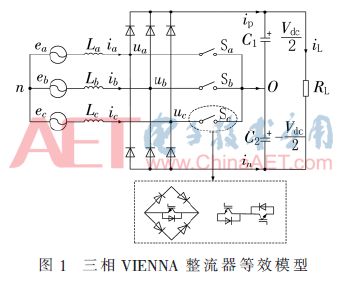
图1为三相VIENNA整流器等效模型,功率器件仅承受一半输出电压,为高压输出提供了可能。传统的平均电流控制框图如图2所示。图中,输出电压u0与参考值 m,当负载变化时,um值也相应改变,以平衡输入输出功率。
m,当负载变化时,um值也相应改变,以平衡输入输出功率。
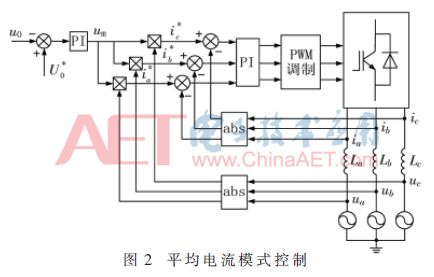
从暂态到稳态的持续时间取决于um的变化率。um变化率降低会导致负载阶跃时系统从失衡状态到稳态的持续时间较长。
2 基于前馈控制的平均电流控制
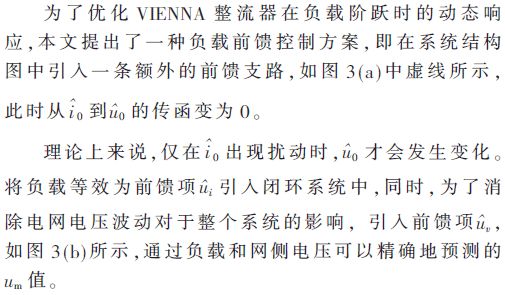
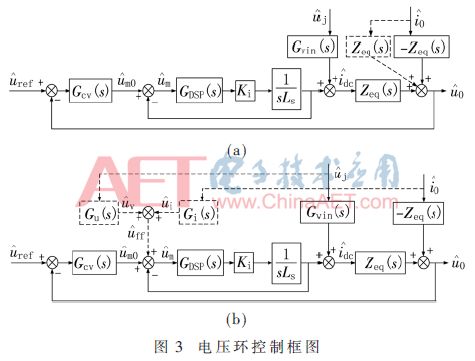
图中,Zeq(s)为等效输出阻抗,Gev(s)为PI调节器的传递函数,GDSP(s)为延时模块,表达式如下:
2.1 前馈项的求解
假设VIENNA整流器工作在单位功率因数状态下,且忽略交流侧电感及整流桥自身损耗。
网侧电流表达式如式(4)所示:
2.2 误差迭代PI算法
为了克服传统PI控制器跟踪电流参考指令存在稳态误差的缺陷,电流内环控制采用误差迭代PI控制算法,保证输出电流对参考电流的跟踪误差趋于0,以消除静态误差。
为了推导方便,直接摘录文献[9]中的简化算法:

式中,ir(τ)为τ时刻的输出电流, e(τ)为τ时刻的误差采样值。继而,可求得误差迭代PI算法中输出到误差采样的传递函数:
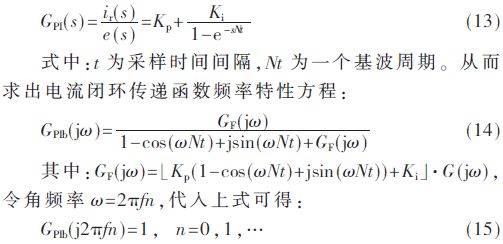
由式(15)可见,闭环系统传递函数的幅值为1,相位移等于0,可以保证系统实现无静差调节。
2.3 前馈控制策略
将前馈控制引入三相VIENNA整流器,以衰减因负载阶跃导致的电压u0过冲,控制方案如图4所示。
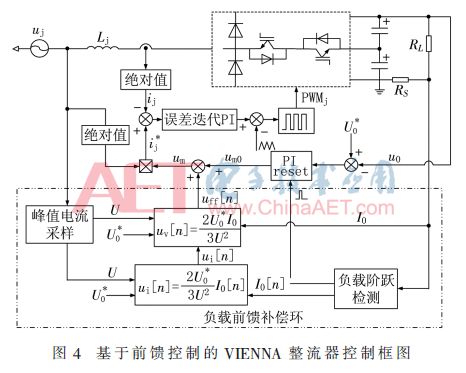
在不同的扰动情况下,前馈变量值uff[n]可以预测um的值,减小u0的偏移。当发生第n次负载阶跃时,uff[n]可由式(16)预测:

然而,当um0添加到uff[n]后将会导致um预测出现偏差。为此,在检测到负载阶跃时需要清空um0的值,所以在脉冲信号之前需要添加一个检测模块。
2.4 负载阶跃检测
本文通过数字算法实现负载阶跃检测过程,如图5所示。
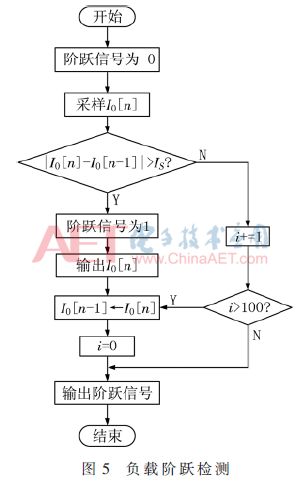
该数字算法流程图相当于一个滞环比较器,为了防止预测出现偏差,需要保证系统只在负载阶跃的时刻进行检测。当I0[n]与I0[n-1]之间偏差超过Is时,便设置阶跃信号,同时输出I0[n]。另外,利用计数器作为检测算法中的计时器,开关频率为250 kHz,间隔频率为100倍的开关频率。
3 仿真分析
为了验证所提出的的前馈控制方案的可行性,本文在Saber环境下搭建了基于前馈控制的VIENNA整流器仿真模型。配置系统的仿真参数为:网侧交流输入电压220 V/50 Hz;输出电压360 V;开关管的开关频率250 kHz;滤波电感90 μH;输入电容225 μF。
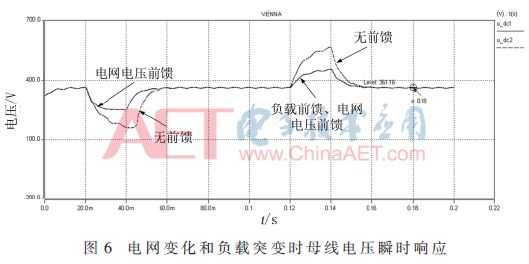
图6为有前馈和无前馈作用下母线电压的瞬时响应波形图。20 ms时加入电网波动,0.12 s时加入负载突变。可见,加入前馈控制系统使得系统的动态性能显著提高。
4 实验验证
根据上述控制策略及分析结果搭建了一台基于TMS320F2808数字处理器的三相VIENNA整流器实验样机。
图7为无前馈控制下,电网电压从100%→60%→100%,继而输出侧功率从2 kW→3 kW情况下输出测的响应波形。图8为加入前馈控制情况下响应波形。
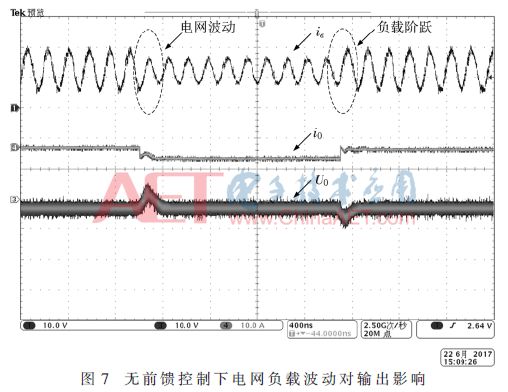
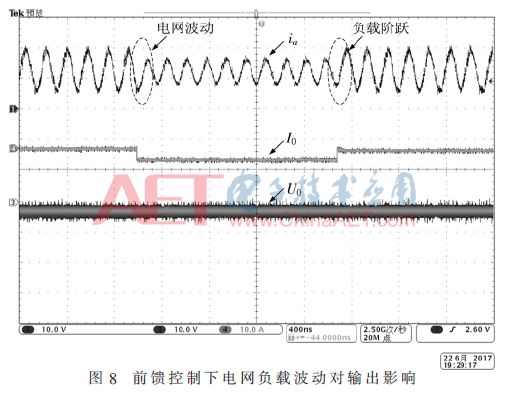
从图中可以看出,与传统的控制方式相比,带有前馈补偿控制策略的系统能在电网波动或负载阶跃时及时响应,优化了系统的动态性能。
5 结论
本文在传统平均电流控制电压环的基础上加入前馈补偿环节,电流内环采用误差迭代PI控制。设计负载检测环节来保证只检测负载阶跃时刻。稳态和负载轻微波动的情况下,不会触发负载前馈计算。由于计算过程仅发生在暂态,所以这种控制策略不会增加计算复杂度。仿真和实验验证了加入前馈控制可改善系统动态性能。
-
一种DSP重复控制的控制方案详解2021-04-02 0
-
带有前馈补偿器的ACOT™控制降压转换器的输出直流偏移计算2018-05-23 0
-
永磁同步电机偏差解耦和电流前馈解耦控制比较2021-06-28 0
-
一种基于滑模观测器的电流偏差解耦控制方法2021-08-27 0
-
电流环的前馈补偿控制是什么2021-09-30 0
-
滞后系统的前馈——反馈预估控制2009-08-10 595
-
具有神经网络前馈控制器的污水处理模糊控制系统设计2012-08-29 763
-
一种平均电流控制型开关调节系统的建模2013-05-06 1224
-
一种基于直流电压前馈控制的逆变电源设计2016-03-31 758
-
根据伺服系统的特点并结合PID控制算法设计了一种位置前馈控制器2017-09-16 1137
-
一种带输出电流前馈的PI双环数字化控制方案2017-12-15 1386
-
飞机机翼喷漆机器人精确动态前馈控制的实现方法详细资料说明2019-04-09 1072
-
一文彻底搞懂前馈控制2023-06-30 23675
-
平均电流控制和峰值电流控制的区别2023-12-14 5216
-
前馈控制系统与反馈控制系统的区别2024-06-17 4097
全部0条评论

快来发表一下你的评论吧 !
