

小觅智能:“双目+IMU”优质方案
描述
人类无论是在活动还是静止时,眼睛都是我们赖以认识周边环境的第一感官。丰富动态的信息通过眼睛不停地被传送至大脑,最终被解读为我们的认知,从而让我们完成与外部世界的深度交互。
而对计算机来说,深度摄像头就是它们的“眼睛”,是机器真正实现人工智能的第一步。
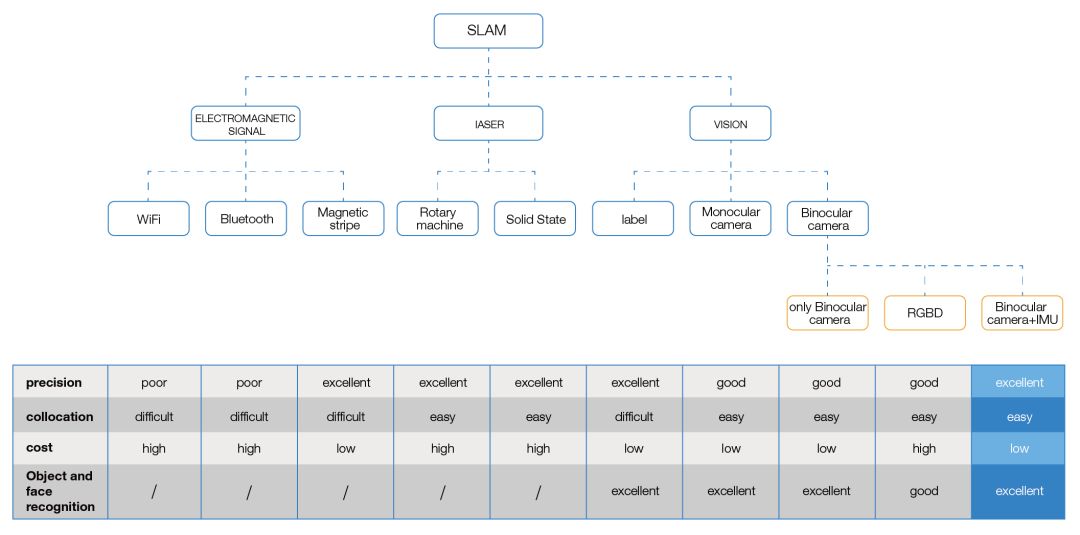
过去三十年,相当可观的工作量被投入计算机视觉领域中,大家不断尝试通过颜色和深度摄像头来模拟人类的感知能力。从单目到双目,从激光红外到软硬件结合方案,视觉识别搭载硬件的新市场不断发酵。
视觉技术方案的兴起,为SLAM的研究提供了更多可能性,可以以更低的价格满足用户对SLAM实时性和精度的更高需求。
1、MYNT EYE标准版发布, 提供“双目+IMU”优质方案
基于这样的市场环境,MYNTAI小觅智能自成立之初就专注于立体视觉整体解决方案的研发。不断深化算法、打磨硬件,时至今日小觅智能终于为市场交出了一份漂亮的成绩单——集成“双目+IMU”优质硬件开发方案的小觅双目摄像头(MYNT EYE)标准版,正式发布!
小觅双目摄像头(MYNT EYE)标准版,利用摄像头和运动传感器的互补性,可为视觉SLAM的研究提供精度更高、成本更低、布置简单、且同时可以实现人脸和物体识别的视觉SLAM研发硬件。就目前而言,小觅智能认为 “双目+IMU”的结合方式,是眼下SLAM的相对最优方案。
作为一款针对立体视觉计算应用进行深入研发的硬件产品。小觅双目摄像头(MYNT EYE)标准版可广泛应用于视觉定位导航(vSLAM)领域,包括:无人车和机器人的视觉实时定位导航系统、无人机视觉定位系统、无人驾驶避障导航系统、增强现实(AR)、虚拟现实(VR)等;同时,双目也可应用于视觉识别领域,包括:立体人脸识别、三维物体识别、空间运动追踪、三维手势与体感识别等;亦可应用于测量领域,包括:辅助驾驶系统(ADAS)、双目体积计算、工业视觉筛检等。
2、突破双目市场壁垒,同等参数实现更优性价比
众所周知,双目方案有显而易见的两大缺点。一是同时处理两部摄像头采集到的数据,计算量很大;二是两部摄像头,成本肯定更高而且产品体积更大。针对这两个缺点,小觅双目摄像头(MYNT EYE)标准版通过巧妙的软硬件整合方式,实现了完美化解。
结合自研的帧同步、自动曝光及白平衡控制等摄像头技术,小觅双目摄像头(MYNT EYE)标准版可以输出高精度同步的图像源,帮助降低算法研发难度,加快算法研发效率。同时,标准版产品标配六轴传感器(IMU)和红外主动光探测器(IR)。
其中,六轴传感器(IMU)可为视觉定位算法的研究提供数据的互补和校正,适用于视觉惯性里程计(VIO)的算法研究,帮助提升定位精度;红外主动光探测器(IR)可以帮助解决室内白墙和无纹理物体的识别难题,提升图像源的识别精度。
此外,为保证摄像头产品输出数据质量,产品出厂时,小觅智能已对双目以及IMU进行标定。产品均通过富士康实验室的高温高湿持续工作、高温高湿持续操作、低温动态老化、高温工作、低温存储、整机冷热冲击、正弦振动、随机振动等多项产品质量测试,保证品质的稳定和可靠。除了用于产品和技术的研发,小觅双目摄像头标准版亦可直接应用于产品量产,加速从研发到产品化的过程。
集成以上技术优势的小觅双目摄像头(MYNT EYE)标准版,售价依然只要¥1999,只为致力于提供优质的立体视觉技术研发与应用平台。
3、专注立体视觉解决方案,剑指最优VPS云服务商
事实上,2017年,小觅双目摄像头甫一面世,就获得了国内外诸多知名企业的认可。时至今日,小觅智能已成为NVIDIA Co-Marketing合作伙伴,并进入NVIDIA全球供应商体系,共同推广立体视觉计算技术。
MYNTAI小觅智能自成立之初,就一直专注于立体视觉技术整体解决方案的研发和攻关,自主研发的VPS(Visual Positioning System)视觉定位导航技术,致力于用仿生的双目视觉方式为机器人装上一双可以实时精确定位的“眼睛”,实现国际领先的视觉里程计(VIO) 技术和基于视觉的实时3D重建和定位导航技术。
沿着这一方向,小觅智能研发推出了小觅双目摄像头,目前,除了已经面世的标准版“S”系列,小觅智能未来还将推出内置深度计算能力的“D”系列产品。客户可根据目标平台的算力、运算架构等因素,在小觅智能选择到最合适的产品。
未来,小觅智能的战略目标是成为全球领先的视觉定位导航VPS云服务商。随着5G网络的发展,移动网络上传速度将足够支持视觉定位和图像识别的所需的分辨率和帧速,VPS信息保留在云端可以做到信息的共享和重用,云端计算也可以把最强大的视觉VPS方案提供给每一个终端机器人、 无人车、 VR和AR设备,同时,通过大数据的积累与整合,也为小觅智能形成独有的竞争优势和壁垒。
-
IMU+多相机高速联合自动标定方案2025-10-23 1685
-
深圳哪家公司有智能管理单元(IMU)2017-09-01 12697
-
小觅双目摄像头公布,可输出帧率最高达80fps的高清彩色图像2018-07-05 9589
-
MWCS世界移动大会:小觅推出双目摄像头深度版2018-07-24 5624
-
2018SINOCES小觅智能第三次获得Leader创新大奖2018-07-26 3035
-
小觅双目摄像头是怎样的产品?2018-08-17 7736
-
2018 WRC:小觅双目摄像头MYNT EYE深度相机亮相2018-08-29 7663
-
小觅智能MYNTAI凭借其双目+vSLAM技术 斩获最佳机器人定位导航方案奖2018-12-20 2878
-
小觅双目深度相机亮相CES 2019,颠覆级新品即将发布!2019-01-14 5697
-
小觅智能发布双目摄像头标准彩色版2019-01-17 3512
-
小觅智能获数千万人民币Pre-B轮投资2019-09-06 7668
-
深耕智能锁方案服务,觅感科技携新品亮相2024温州国际锁具展2024-05-31 930
-
觅感科技携新品方案亮相中国智能锁科技创新大会2024-10-18 1000
-
追觅“觅家”生态成型:AI算法加持,主动式交互进入智能戒指2025-10-31 2854
全部0条评论

快来发表一下你的评论吧 !
