

光纤陀螺仪与惯性导航系统在无人车驾驶中的应用
电子说
描述
一、光纤陀螺仪与惯性导航系统简介
光纤陀螺仪是一种基于光学传感技术的精密仪器,利用Sagnac效应来检测旋转角速度。与传统的机械陀螺仪相比,光纤陀螺仪具有全固态、无旋转部件和摩擦部件、寿命长、动态范围大、瞬时启动、结构简单、尺寸小、重量轻等优点,因此在精确制导、飞机导航等领域得到了广泛应用。
惯性导航系统(Inertial Navigation System, INS)是一种不依赖外部信号的自主导航系统。它通过惯性测量单元(Inertial Measurement Unit, IMU)测量载体的比力及角速度信息,结合初始运动条件,实时推算速度、位置、姿态等参数。惯性导航系统不向外部辐射能量,不依赖于外界信号,因此具备强自主性。
二、陀螺仪在无人车驾驶导航中的应用
姿态控制:
陀螺仪能够精确测量无人车在不同轴向上的角速度,从而计算出无人车的姿态和角位移。
通过控制无人车的姿态和方向,实现精准的转弯和转向,提高无人车的行驶稳定性和安全性。
导航定位:
结合加速度计等传感器,陀螺仪可以提供无人车的速度和位移信息。
在GPS信号受限或无法接收的情况下,陀螺仪惯导系统可以独立进行导航定位,确保无人车的连续行驶和准确导航。
同时,陀螺仪惯导系统还可以与GPS等外部导航系统相结合,提高整体定位精度和可靠性。
自主驾驶:
陀螺仪惯导系统为无人车提供准确的姿态和运动参数,是实现自主驾驶的重要基础。
通过结合其他传感器(如激光雷达、摄像头等),无人车可以实现更加精准的避障、跟车、停车等功能。
陀螺仪惯导系统的高精度和实时性,使得无人车在复杂多变的交通环境中能够做出快速准确的决策和响应。
三、陀螺仪惯导系统的优势
独立性:陀螺仪惯导系统不依赖于外部信号,能够在无信号或信号受限的环境下独立进行导航定位。
高精度:通过精确的测量和积分运算,陀螺仪惯导系统能够提供高精度的导航信息。
实时性:陀螺仪惯导系统能够实时测量和计算无人车的姿态和运动参数,为自主驾驶提供实时决策支持。
稳定性:陀螺仪惯导系统具有较高的稳定性和可靠性,能够在各种环境下保持稳定的性能。
四、与GNSS系统的互补
在无人驾驶汽车中,光纤陀螺仪惯性导航系统通常与全球导航卫星系统(GNSS)结合使用。GNSS在卫星信号良好时能提供高精度定位,但在信号微弱的环境(如地下车库)中,其定位精度会大幅下降。而IMU即使在复杂环境中也能进行准确定位,但其存在误差累计问题。通过将IMU与GNSS结合,可以达到优势互补,大幅提升定位系统的精确度。
光纤陀螺仪惯性导航系统在无人车驾驶导航中的应用,以其高精度、自主性强、尺寸小、重量轻等优势,成为无人驾驶汽车导航系统的重要组成部分。随着技术的发展,其在自动驾驶领域和智能交通的应用将更加广泛和深入。
北京优利威公司目前有几十个型号的光纤陀螺仪产品,类型涵盖光纤陀螺寻北仪、光纤陀螺惯性组合、组合惯导系统、微机械惯性测量单元、组合微惯性测量系统、三轴MEMS陀螺等等,可以满足市场上众多行业的应用需求。

光纤陀螺寻北仪

特点:
具有快速启动、寻北精度高的工作特性;可在大姿态角(≤7°)的环境条件下精确寻北;
内置7°传感器,有效进行姿态角度校准;带经纬度补偿,稳定性高,线性好;
具有9~36V的宽工作电压范围;全密封封装,满足宽温度工作、防水、防潮、防尘等工作环境。
典型应用:
战略导弹制导初始对准,天线系统的稳定
姿态/方位基准系统,矿用定向(替代磁罗盘),陀螺全站仪
性能指标:
| 项目 | UGFS-A | UGFS-B | UGFS-C | UGFS-D |
| 方位角(1δ) | 0.06° | 0.3° | 1.0° | 1.5° |
| 姿态角 | 0.06° | 0.06° | 0.06° | 0.06° |
| 测量范围: | ||||
| 方位角 | 0°~360° | |||
| 姿态角 | -7°~+7° | |||
| 启动时间 | 10s | |||
| 寻北时间 | 3min/5min | |||
| 供电范围 | +9Vdc~+36Vdc | |||
| 最大功率 | 30W | |||
| 输出形式 | RS422(波特率9600~115200) | |||
| 工作温度 | -40°~ +60° | |||
| 储存温度 | -45°~ +70° | |||
| 重量 | 6.1kg | |||
| 连接器 | Y11P-1210ZK10 |
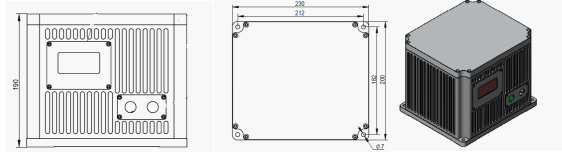
外形尺寸:(单位:mm,未注尺寸公差按GB/T1804-2000等级C执行。)
更多陀螺仪应用请电话或微信联系我们!
审核编辑 黄宇
-
基于加速度计的无陀螺惯性导航系统的研究2009-12-02 5887
-
几种高精度陀螺仪的应用和分析2018-11-09 3069
-
陀螺仪寿命试验测试系统中的数字式功率计的设计和精度分析2019-06-04 1831
-
惯性导航系统、加速度计、陀螺仪的原理2020-05-18 3600
-
详解GPS导航系统中的惯性技术2020-06-13 4428
-
VxWorks在惯性导航系统中的应用2009-03-29 675
-
陀螺仪数字可调式测试电源方案设计2010-11-17 1793
-
惯性导航的工作原理及惯性导航系统分类2018-05-10 38548
-
带你看看高精度陀螺仪有哪些2018-10-23 22485
-
高精度MEMS陀螺仪或将取代光纤陀螺仪2020-07-14 5030
-
未来智能汽车的标配——惯性导航系统2022-01-17 8571
-
基于声光效应的高灵敏度行波陀螺仪改进性能的新方法2022-09-19 1397
-
惯性导航系统高精度定位定向模组M20助力无人驾驶车辆隧道精准导航2023-09-11 2923
-
MEMS陀螺仪系统的精确导航2023-10-24 3653
-
组合导航系统中的惯性导航系统是什么?2025-06-18 1846
全部0条评论

快来发表一下你的评论吧 !
