

集成异构网络:EtherCAT转MODBUS机器人通信方案
电子说
1.4w人已加入
描述
- 项目背景
在工业机器人自动化产线中,实现高效、实时的通信是提升整体性能的关键。机器人控制系统通常采用高性能总线(如EtherCAT)连接PLC,而许多执行设备(如变频器)仍采用RS485接口。为实现PLC对变频器等设备的精确控制,需要一种稳定可靠的通信桥梁,将EtherCAT网络与RS485设备无缝集成。
- 解决方案
本项目采用EtherCAT转RS485网关模块,作为PLC与变频器之间的通信转换单元。该模块解析EtherCAT主站下发的控制指令,转换为RS485接口支持的Modbus RTU协议,从而实现对变频器的启停、频率调节等功能。同时,模块采集变频器的状态数据,并通过EtherCAT网络反馈给PLC,形成闭环控制。

- 设备选型
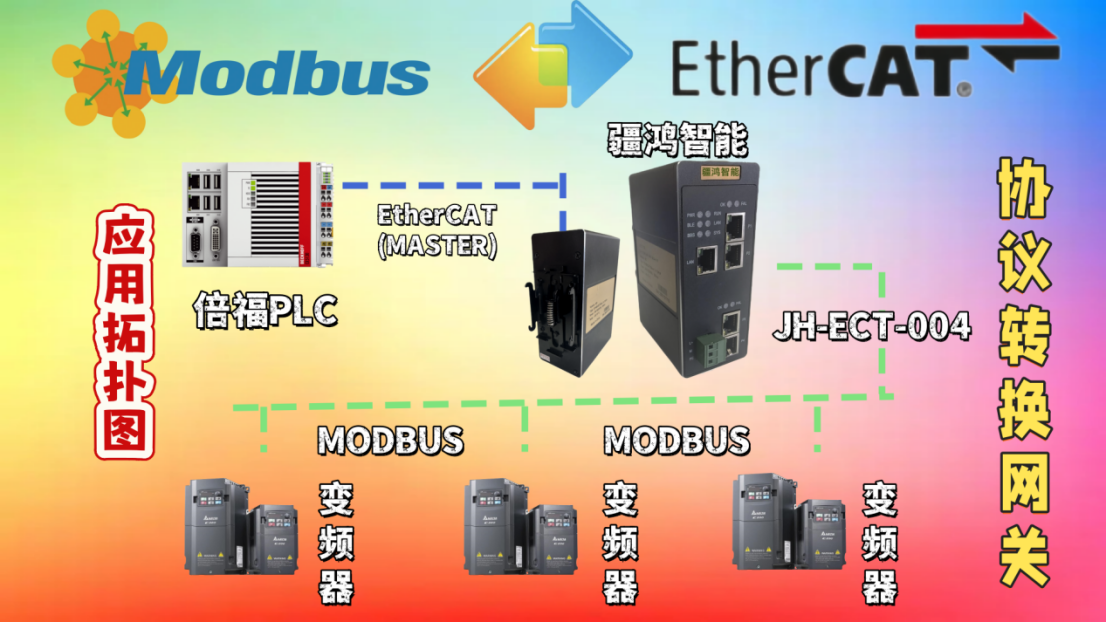
- PLC:选用支持EtherCAT主站功能的控制器,如倍福CX系列。
- EtherCAT转RS485网关:采用疆鸿智能网关模块,具备双绞线接口与工业级隔离防护。
- 变频器:选用支持Modbus RTU协议的RS485接口变频器,如台达VFD-E系列。
- 工业机器人:选用六轴关节机器人,集成伺服驱动器与EtherCAT通信卡。
- 系统架构
系统以PLC为控制核心,通过EtherCAT总线连接机器人控制器与EtherCAT转RS485网关。网关通过RS485串行总线以菊花链形式连接多台变频器,每台变频器驱动一台辅助设备(如传送带电机或水泵)。PLC通过EtherCAT网络周期性地收发数据,实现机器人运动与变频器控制的精确同步。
- 应用效果
通过引入疆鸿智能EtherCAT转RS485网关,系统实现了以下改进:
- 实时性提升:EtherCAT的分布式时钟机制确保了通信周期稳定在毫秒级,减少了控制延迟。
- 布线简化:RS485总线可串联多台设备,降低了布线复杂度与成本。
- 维护便利:网关模块支持在线诊断,便于快速定位通信故障。
- 总结与展望
EtherCAT转RS485方案在工业机器人应用中有效解决了异构网络融合的难题,兼顾了高速控制与设备兼容性。未来,随着工业物联网技术的发展,此类网关设备可能进一步集成OPC UA、TSN等标准,实现更广泛的数据互通与云端协同,为智能工厂提供更坚实的通信基础。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
疆鸿智能EtherCAT转DeviceNet,发那科机器人融入倍福的“焊接红娘”2026-02-25 410
-
疆鸿智能ETHERCAT转MODBUS TCP/IP,破解化工设备异构通信难题2026-01-06 455
-
医疗界的“万能转换器耐达讯EtherCAT转RS\\-232“协议互联的秘密武器2025-07-23 721
-
打破协议壁垒,CAN转EtherCAT连接工业相机秒变跨国CP”!2025-07-14 390
-
为工业通信架起一座高效、稳定的桥梁!疆鸿智能Ethercat转TCP/IP解决方案应运而生!2025-03-31 781
-
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计2024-05-29 1032
-
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统2023-10-24 3243
-
Profinet转Modbus TCP网关连接搬运机器人配置案例2023-06-07 2027
-
亚信AX58200 EtherCAT转Modbus TCP网关解决方案介绍视频2021-08-23 1295
-
最实用的STM32和ROS机器人的串口通信方案2021-08-20 1593
-
STM32和ROS机器人的串口通信方案2021-08-11 1409
-
亚信电子 AxRobot EtherCAT七轴助力控制机器手臂解决方案2021-06-23 1144
-
智能扫地机器人解决方案2017-05-27 8811
-
基于中间件技术的异构机器人系统设计及实现2010-03-18 576
全部0条评论

快来发表一下你的评论吧 !
