

PIC32CX SG41/SG60/SG61高级安全MCU关键技术解析与应用指南
描述
Microchip Technology PIC32CX SG41/SG61高级安全微控制器 (MCU) 是一款高性能MCU,采用浮点运算单元 (FPU) 的32位Arm^®^ Cortex ^®^ -M4处理器。这些器件的运行频率高达120MHz,设有1MB双面板闪存(带ECC)和256KB SRAM(带ECC)。它还增加了一个10/100以太网MAC和2个CAN-FD端口,用于工业自动化、汽车应用和需要有线连接的通用应用。闪存的OTP区域用于开发不可改变的安全启动。它还具有安全调试、芯片擦除保护、IP保护和启动保护特性。
数据手册:*附件:Microchip Technology PIC32CX SG41,SG61高级安全MCU数据手册.pdf
Microchip Technology PIC32CX SG41/SG61系列MCU具有出色的特性,具有同类领先的功率性能和集成的硬件安全性。
特性
- 芯体
- ARM Cortex-M4F CPU,运行频率高达120MHz
- 4KB组合指令缓存和数据缓存
- 8区内存保护单元 (MPU)
- 浮点运算单元 (FPU)
- 存储器
- 1MB系统内自编程闪存,带纠错码(ECC)
- 256KB静态随机存取存储器主存储器,带纠错码(ECC)
- 高达4KB的紧耦合内存 (TCM)
- 8KB额外备份静态随机存取存储器
- 低功耗和电源管理
- 空闲、待机、休眠、备份和睡眠模式
- SleepWalking外设
- 电池备份支持
- 安全
- 一个高级加密系统(AES),具有256位密钥长度和高达2MB/s的数据速率
- ECB、CBC、CFB、OFB、CTR运行模式
- 真随机数发生器 (TRNG)
- 公钥密码控制器(PUKCC)
- RSA、DSA
- 椭圆曲线加密(ECC)ECC GF(2n),ECCGF(p)
- 基于安全散列算法(SHA1、SHA224、SHA256)、DMA辅助的完整性检查模块(ICM)
- 针对芯片擦除、启动部分编程和调试访问的永久保护,允许不可变的启动大小可配置的不可变启动部分在闪存中具有启动读取保护,允许安全启动支持
- 外设/定时器
- 32通道事件系统
- 最多八个可配置串行通信接口(SERCOM)
- 八个16位定时器/计数器(TC),每个可配置为16位、8位和32位TC
- 两个具有扩展功能的24位控制定时器/计数器(TCC)
- 三个16位控制定时器/计数器(TCC),带扩展功能
- 32位实时计数器 (RTC),带时钟/日历功能
- 多达5个唤醒引脚,带篡改检测和去抖动滤波器
- 高级模拟
- 双12位,1个Msps模数转换器(ADC),每个最多16个通道
- 双12位,1个Msps模数转换器(ADC),每个最多16个通道
- 两个模拟比较器(AC),带窗口比较功能
- 通信接口
- 一个双通道IC内部声音接口(I2S)
- 并行捕获控制器(PCC),最大14位宽
- 外围触摸控制器(PTC),具有多达32个自电容和多达256个互电容通道
- 两个SD/MMC主机控制器(SDHC)
- 32通道直接内存访问控制器 (DMAC)
- 一个四路I/O串行外设接口(QSPI)
- 一个10/100Mbps以太网MAC,带专用DMA
- 两个控制器区域网(CAN),支持CAN 2.0A/CAN 2.0B和CAN-FD(ISO)
- 一个全速(12 Mbps)通用串行总线(USB)2.0,具有嵌入式主机和设备功能
- 时钟管理/系统
- 32.768kHz晶振器(XOSC32K),带时钟故障检测
- 两个具有时钟故障检测功能的8MHz至48MHz晶体振荡器(XOSC)
- 32.768kHz超低功率内部振荡器(OSCULP32K)
- 上电复位 (POR) 和掉电检测 (BOD)
- 支持调试器开发
- 双引脚串行电线调试(SWD)编程和调试接口
- 六个硬件断点和四个数据观察点
框图
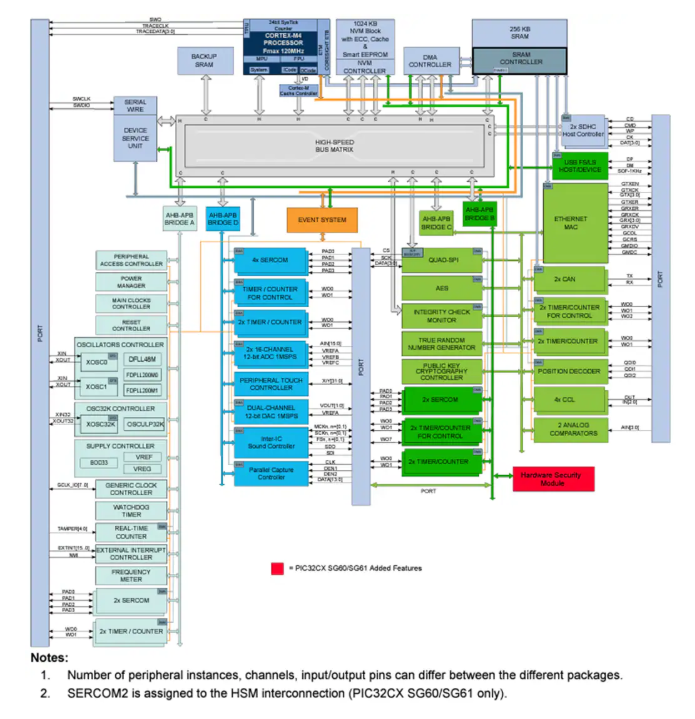
PIC32CX SG41/SG60/SG61高级安全MCU关键技术解析与应用指南
一、产品概述与硅版本识别
PIC32CX SG41/SG60/SG61是Microchip推出的高级安全MCU系列,专为需要高可靠性及安全性的应用场景设计。该系列包含三个子系列:
- SG41系列:设备ID 0x61870x01/0x61870x00,硅版本B1(Rev 0x5)
- SG60系列:设备ID 0x61800x01/0x61800x00,硅版本A0/B1(Rev 0x3/0x5)
- SG61系列:设备ID 0x61820x01/0x61820x00,硅版本B1(Rev 0x5)
关键特性:
- 支持蓝牙低功耗(BLE)和Zigbee无线协议
- 集成硬件安全模块
- 丰富的外设接口(CAN、I2C、USART等)
- 多种低功耗模式
二、关键硅版本问题与解决方案
2.1 电源管理相关注意事项
- 待机模式限制:
- 当前硅版本不支持STANDBY低功耗模式
- 替代方案:使用Idle低功耗模式,需配合外设事务完成检测和低速时钟切换
- 上电复位问题:
- 极少数情况下AHB0/AHB1缓存线可能复位不彻底
- 解决方案:
- 通过NVM USER ROW启用看门狗(WDT Enable=0x1,WDT Period=0x0)
- 上电后手动切换NVMCTRL.CTRLA.CACHEDIS1位(0→1)
2.2 通信接口关键问题
CAN控制器问题
- 边缘过滤异常(CCCR.EFBI=1时):
- 在集成阶段结束时若Rx引脚出现下降沿,可能导致首比特接收错误
- 解决方案:禁用边缘过滤或接受重传机制
- DAR模式异常:
- 在前两个标识符比特丢失仲裁时,TXBRP.TRPn可能未被正确清除
- 影响范围:仅限CAN FD消息(>8字节数据)
- 消息顺序问题:
- 相同Message ID的TX缓冲区可能出现传输顺序反转
- 推荐方案:使用TX FIFO或单缓冲区顺序请求
SERCOM I2C问题
- 保持时间偏差:
- 实际SDA保持时间仅为文档声明的40-50%
- 需重新计算时序余量
- 重复起始条件异常:
- 高速模式下CTRLB.CMD=0x1会产生STOP而非Repeated Start
- 替代方案:10位地址模式下重写相同地址
2.3 存储子系统注意事项
- NVM读取冲突:
- 页缓冲写入期间混合NVM读取可能导致数据损坏
- 解决方案:写入前禁用缓存(CTRLA.CACHEDIS0/1=1)
- FDPLL稳定性:
- 可能出现虚假解锁状态
- 配置建议:
- 启用旁路模式(DPLLCTRLB.LBYPASS=1)
- 设置快速唤醒(DPLLCTRLB.WUF=1)
- CLKRDY置位后延迟10ms再启用时钟
三、典型应用场景
- 工业控制系统:
- 利用CAN FD实现设备间可靠通信
- 通过硬件安全模块保障固件完整性
- 智能家居网关:
- 结合BLE/Zigbee实现无线组网
- 使用TCC模块进行功率控制
- 汽车电子:
- 多路CAN总线管理
- 利用RTC模块实现事件时间戳记录
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
SG1543/SG2543/SG3543电源输出监控电路的特性与应用2026-04-08 206
-
深入解析SG2525A/SG3525A脉宽调制器:性能、特性与应用2026-01-27 771
-
PIC32CK SG01/GC01 Curiosity Ultra开发板技术解析与应用指南2025-10-09 1172
-
SG2520EGN_SG2520VGN OSCILLATOR2022-07-27 1017
-
SG7805AT 怎么订货2021-12-22 1826
-
控制舵机SG90的教程2021-08-10 3613
-
飞思卡尔S08SG16/32可扩展8位MCU2019-07-23 2283
-
SG61——测量长度达6米的新款拉线编码器2019-07-11 2957
-
SG1524/SG3524无变压器降压变换,SG1524-SG3524 POWER SUPPLY2018-09-20 2584
-
sg3524控制的恒流源电路图_SG3524的应用电路2018-04-02 24255
-
SG3526,shutdown问题2017-12-02 5102
-
sg3525中文资料2009-09-11 12120
全部0条评论

快来发表一下你的评论吧 !
