

车载视觉是自动驾驶的难已突破的屏障
描述
今天,大家对自动驾驶都充满了期待,任何一场科技大秀上,总少不了自动驾驶的身影。不过与之伴生的,还有与自动驾驶相关的事故数量的增加,特斯拉、Uber前后脚都发生了在(准)自动驾驶状态下的致死事故。
可能你会觉得自动驾驶商用进程有些慢,现在的方案还不靠谱儿,但考虑到其应用场景的特殊性,以及开发上的难度,你就不会有太多抱怨了。比如就车载视觉处理,这个自动驾驶的核心要素来说,其对开发者提出的挑战就不一般。
姑且不提自动驾驶,今天想做好一款像样的ADAS就不简单。一方面,ADAS视觉处理需要应对越来越复杂的应用环境,暗光、恶劣天气下也要确保可靠的表现;另一方面,为了提升视觉系统识别判断的准确性,甚至让其具有自我学习提升的能力,引入机器学习、神经网络等AI算法也势在必行。
这些需求必然会增加视觉处理工作的复杂性和负荷,耗费更多的计算资源和时间,而这又恰恰和车载应用这个资源受限的嵌入式环境,以及“硬”实时性的要求构成矛盾……这就是车载视觉应用开发者每天面对的困局。
图1,车载视频处理典型流程
要想“破局”,我们首先来看看车载视觉处理典型的流程。这个流程包括四个步骤:
1
第一步
预处理:包括成帧、颜色调整、白平衡、对比度均衡、图像扭正等工作,这种像素级的处理特点是数据量非常大,而且每像素之间相互独立,彼此没有很强的依赖关系,要求高带宽的并行数据处理能力。
2
第二步
特征提取:是在预处理的基础上,提取出图像中的特征点,特别是关键的边缘角点。
3
第三步
目标识别:基于特征数据的输出,对图像中的物体进行识别分类——人、车、交通标志等,这其中就会运用到一些机器学习、神经网络的算法。
4
第四步
目标跟踪:对上述单帧图像进行记录,并累计多帧后做出判定,实现稳定的识别和判断。
通常前三步被认为是底层和中层的处理,运算的并行度较高,第四步由于有前后的逻辑判断关系,所以属于顺序执行,需要串行处理。可见,车载视觉处理流程中的这些任务,需求各不相同,单一架构的硬件平台很难满足所有要求,所以就需要有更加复杂、综合的异构硬件平台,以不同的硬件资源去应对不同的计算处理任务,这样才能胜任。
以恩智浦半导体的S32V车载视觉处理器为例,它对应车载视觉处理的不同步骤配置了不同的针对性的计算单元。
图2,恩智浦半导体S32V车载视觉处理器框图(图片来源:NXP)
对于预处理到特征提取这种像素级的工作,S32V提供了一个可编程的ISP(图像信号处理器),对于流处理进行加速;而其可编程性也为底层处理提供了灵活性,以应对不同应用中的预处理需求。
对于特征提取到目标识别这个层次的处理任务,由于要运行AI算法,特别需要视觉加速,为此S32V引入了两个专用的APEX-2协处理器,实现高速并行的单指令多数据架构的加速计算。
在目标识别到目标跟踪高层处理,涉及到串行计算,S32V通过运行频率高达1GHz的多核Arm Cortex-A53处理器(最高配置可达四核)来完成,同时S32V在处理器系统中还集成了一个频率高达133 MHz的Cortex-M4内核,去实现一些控制功能,以及实时性的工作。
在加上其他诸如3D GPU、硬件安全加密、存储和外设接口等功能,S32V构成了一个完整的汽车级的安全嵌入式视觉处理平台。
但是想做一个完整的方案或产品,有了合适的硬件只是第一步,接下来还需要软件的配合。在功能受限、功耗敏感的嵌入式视觉应用中,如何实现硬件和软件之间最优的配合尤为关键,也就是说,要将软件任务放在最合适的硬件单元中运行,充分利用和释放出硬件的能力。
为了达到这一目的,一个基础性的工作就是:要对应用中典型的计算模式做出分析和分类,找出有并行加速需求或者潜力工作,将其安排给最适合的硬件去加速。实际的工作中,可以尝试几种不同的并行计算加速方式:
数据并行:将需要并行处理的数据,交给有并行计算能力的单元去做,如APEX-2这种专用的协处理器——专用的肯定比通用的处理器速度快。
流水线并行:综合调度各种计算单元,在同一时间上让所有单元都处于满负荷运行状态,谁也不闲着。
任务并行:在同一时间安排进行不同的视觉处理任务。
经过上述全面的优化,软硬件的紧密配合,车载视觉处理速度和综合性能才能得到大幅的提升。
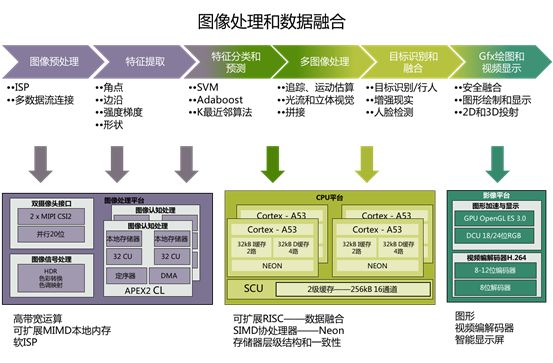
图3,车载视频处理流程和对应S32V硬件资源(图片来源:NXP)
车载视觉可以说是嵌入式视觉处理领域难度较高的一个领域,需要各方面资源更紧密的协作、全方位的配合——硬件开发者需要充分理解目标应用的需求,提供最高效的硬件加速架构;软件开发者也要吃透硬件的特性,合理调配资源,将硬件性能发挥到极致。虽然不容易,但这就是我们通往自动驾驶的必由之路。
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8166
-
自动驾驶真的会来吗?2016-07-21 14075
-
细说关于自动驾驶那些事儿2017-05-15 7011
-
自动驾驶的到来2017-06-08 7298
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 7347
-
高级安全驾驶员辅助系统助力自动驾驶2018-09-14 3340
-
如何让自动驾驶更加安全?2019-05-13 3612
-
自动驾驶系统要完成哪些计算机视觉任务?2020-07-30 2150
-
联网安全接受度成自动驾驶的关键2020-08-26 3057
-
为什么视觉系统对自动驾驶至关重要看了就知道2020-12-29 1791
-
网联化自动驾驶的含义及发展方向2021-01-12 4816
-
视觉系统对自动驾驶的重要性2021-01-25 3243
-
基于视觉的slam自动驾驶2021-08-09 2904
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2292
-
自动驾驶技术的实现2021-09-03 3068
全部0条评论

快来发表一下你的评论吧 !
