

人类手指灵巧,但是机器人正在迎头赶上
描述
人类手指灵巧,但是机器人正在迎头赶上。
在1973年的经典科幻电影《西部世界》中,度假胜地的机器人员工与人类客人没有什么区别,除了一个小线索:工程师们还没有完善机器人的手。
现实机器人的能力远远落后于《西部世界》中的机器人杀手,但在这一小点上,现实和虚构是一致的:手和物体的操控,正是机器人技术中特别具有挑战性的一部分。加州大学伯克利分校的工程师Ken Goldberg说:“抓握是目前(机器人技术)最重要的挑战。”
来源:Sam Chivers
在过去的50年里,机器人在严格控制的工作条件下已经表现得非常好,例如在汽车装配线上。昆士兰科技大学澳大利亚机器人视觉中心(ACRV)的机器人研究员Juxi Leitner说:“你可以针对一项特定的任务建立一个机器人系统,比如捡起一个汽车零件。你确切知道要把某个部件放置到什么位置,机械臂需要达到什么位置;因为机器人已从同一个地方拾起同样的部件几百万次了。”
但现实世界不是一条可预测的装配线。尽管人类可以轻松地与工厂大门之外的无数物体和环境相互作用,但这对于机器人来说却极其困难。
这些几无章法可言的环境是机器人研究人员需要攻克的下一个前沿领域,它们对于机器人抓握来说是特别棘手的。任何希望与外界进行实体交互的机器人都不得不面对一个问题:物体对触摸的反应具有内在不确定性。Goldberg说:“预测遥远的小行星的运动比我们预测一个简单物体被推过桌子的运动要容易得多。”
一些研究人员正在使用机器学习来使机器人独立识别和设计如何抓取物体。另外一些人则正在改进硬件——机械手从钳形结构到仿人手,不一而足。机器人学家也正全力以赴应对如何操控抓握住的物体这一挑战。
提升机器人抓握能力可能会产生巨大的社会影响。商业实体,特别是涉及各种货物运输的实体,正在密切关注着相关研究的发展。“这方面具有巨大的需求。伴随着电子商务的飞速发展,产业界非常希望能解决这个问题。”Goldberg说。业界的研究兴趣比以往任何时候都大,“这是一个将研究真正付诸实践的好机会。”
学会学习
过去三年来,电子商务巨头亚马逊组织的年度竞赛充分体现了产业界对此的浓厚兴趣。亚马逊机器人挑战赛(Amazon Robotics Challenge)要求参赛队伍设计并制造一种机器人,让它根据客户订单将物品从集装箱中分拣出来,然后放进盒子内。
物品种类多样,从瓶子、碗到软玩具和海绵,皆包括在内;而且这些物品一开始是混杂在一起的,这使得物体辨别和机械抓握都非常具有难度。
2017年7月,Leitner的ACRV队建造的机器人Cartman夺得了挑战赛的胜利。Cartman类似于游乐场中的抓娃娃机,由一个铝制框架支撑机械爪组件构成。它有两个用于拾取物体的工具——末端执行器,一个是两块平行板组成的抓器,另一个是连接了真空泵的吸盘。
对于机器人遇到的每一个物体,研究人员都指定了应该首先尝试哪一个执行器;如果不起作用,机器人就会切换另一个。
不过,机器人首先必须找到它所要寻找的物品。为此,ACRV队采用了机器学习方法。Cartman主要依靠业内流行的RGB-D相机获得输入,RGB-D相机可以同时获取物体颜色和深度信息。相机通过执行器向下看,看到下面盒子的内部。
Leitner解释说,这个角度有利于Cartman标记每个像素对应的物品——这是一种被称为语义分割的深度学习形式。一旦找到目标物品的像素群,相机的深度感应能力就可以帮助机器人计算出如何抓取该物品。Leitner说:“简单地说,我们把物品露在外面最多的那部分固定住。”
机器人抓取技术的最新进展得益于机器学习的快速发展。“软件一直是制约瓶颈,但由于深度学习,它正变得越来越先进。”加州大学伯克利分校的深度学习专家Pieter Abbeel说。这些发展开启了“机器人应用的全新途径”。
Abbeel是加利福尼亚埃默里维尔的一家初创公司covariant.ai的联合创始人和首席科学家,公司使用深度学习来训练机器人。与其设定机器人执行特定的动作,倒不如通过人类示范教会机器人适应同一问题的不同场景。
人类教练通过头戴装置观看机器人手臂上相机的反馈图像,并使用运动控制来引导机器人手臂拾取物体。在此过程中所采用的方法数据会传输给神经网络。“只要有几百次这样的演示,你就可以训练一个深度神经网络学会一项技能。”Abbeel说,“我的意思是,机器人不是掌握了一种它将重复执行的特定动作,而是掌握了根据相机反馈来调整动作的能力。”
Goldberg也同样使用机器学习来训练机器人掌握抓握技巧。但他不是从真实世界中收集数据,而是对他的Dex-Net软件进行虚拟训练。“我们可以迅速模拟出数以百万计的抓握。”他说。该软件使工业机器人能从成堆的物体中拾取指定物品,即使是它以前没有见过的,且成功率超过90%。应对某个特定物体时,它还可以自己决定是使用平行钳夹还是吸盘工具。
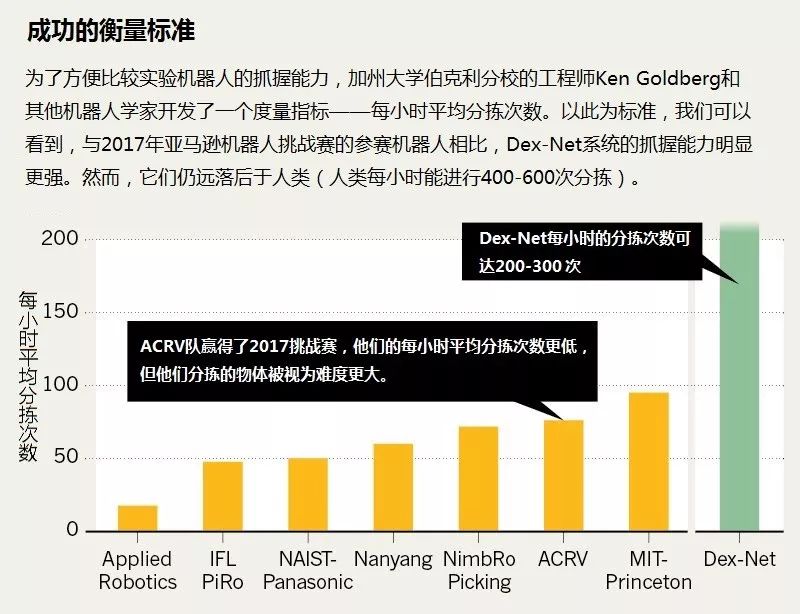
第四代Dex-Net将于2018年面世。根据Goldberg和其他机器人学家开发的一种体现可重复性的度量指标——每小时平均分拣次数,Dex-Net目前属于最快的一类分拣机器人,每小时平均分拣次数可以达到200次以上,虽然仍然落后于人类——约为400到600次,但还是远远超过最近的亚马逊机器人挑战赛参赛团队所取得的成绩(见“成功的衡量标准”)。
来源:Ken Goldberg
但Dex-Net的模拟世界是不完善的。例如,该模型假定物品都是刚性的,不考虑包含液体的物体。Abbeel表示,对机器学习来讲,模拟可能并不总是最简单的方法。“真实世界是免费的模拟器,”他说,“如果机器学习能平衡这两种方式是最好的。”
轻柔地抓取
Goldberg和Leitner采用了流行的平行钳夹和吸盘组合:2017年亚马逊机器人挑战赛中的大多数团队都是这样。但是这些工具是如何抓取物体的呢?——提前规划好接触点再尽可能精确地移动到位,这与我们人类使用双手的方式是非常不同的。
柏林工业大学的机器人学家Oliver Brock说:“如果你要从桌子上拿起一样东西,比如笔,你首先接触到的是桌子。”我们不考虑需要把手指放在哪里。人手比较柔软,可以做到柔性接触——手指根据物体表面情况而发生变化。麻省理工学院的机器人学家Daniela Rus说:“因为人手和物体之间具有较大的接触面,你可以凭直觉接触和抓取。因为柔软的手指,我们改变了抓握的方式。”
许多人正在试图将柔性引入机器人机械爪中,以发挥柔性抓取的优势。Brock的实验室开发了“RBO Hand 2”——一个有五根硅胶手指的仿人手机械臂。通过压缩空气的移动控制这些硅胶手指,让手指能够根据需要弯曲和伸直。
虽然仿人类的手指可能并不适合每一种任务,但却是与我们所生活的世界进行互动的理想方式。“这个世界是为人手设计的。”Brock说。不过他的机器人手的拟人化设计还有另一层考量。“说来尴尬,”他说,“一般人,甚至是机器人学家,都更喜欢那些看起来像人类的东西。”
柔性的好处已经吸引了商界的注意。马萨诸塞州剑桥市的Soft Robotics公司制造了一种气动钳夹,比Brock的研究模型更像爪状,并已在工厂里试用,用于处理易碎产品,避免发生损害。
另一家初创公司——马萨诸塞州萨默维尔的Righthand Robotics正为当前流行的机械爪和吸盘装置添加柔性特征。公司设计的爪子有三根柔性手指,中间是可伸缩的吸盘。
公司联合创始人Lael Odhner说,该设计的灵感来自于猛禽;这些鸟类大部分前臂肌肉组织都附着在一组直达爪尖的肌腱上。类似地,Odhner的机械爪马达的所有力量都被用于一个单一的闭合动作中。这个简单的动作牺牲了执行精细运动的能力,但提高了可靠性——对于商业用途的夹钳来说这是一个重要的考量。但是,可伸缩吸盘则弥补了其中的不足。Odhner说:“它取代了几十个精密的致动器,否则你将不得不把它们全部安装在机械手上。”
一手掌控
柔性对于机器人学来说还是比较新的。Rus说:“这是一个非常强大的概念,但人们才刚刚开始探索它。”
一种常见的批评意见是:一个柔软的机械手在抓住物体后,很难做出有用的动作。Rus解释说“你能很好地抓握物体,”但“你不知道手中物体的确切朝向”。这使得操控物体变得棘手。Goldberg对此表示赞同:“一只柔软、可以包盖物体的手,实际上降低了手中物体的能见度。”
人类解决这个问题的方式很简单:触摸。但很少有机器人被赋予这种能力。“人们一致认为赋予机器人触觉很重要,”Brock说,只是这很难做到。
他正在探索利用两种方法来赋予他的柔性机械手触觉。较成熟的方法是将液态金属管嵌入包裹在机器人手指周围的硅胶片中,然后利用金属管周围的电阻监测所受的力。“测量手指每个部分所受的应力,根据这些数据并通过机器学习来推断手指到底发生了什么变化。”这个小组目前正在评估每个手指上需要多少个应力传感器来测量各种力。
Brock的另一种方法是利用声学来获得触觉。在概念验证测试中,研究人员在柔性手指的气腔内放置一个麦克风,然后通过收录的声音辨别手指的哪一部分接触到物体、接触的力量和物体的材料。将麦克风深埋入手指内,可以避免降低机械手指柔性。Brock说这项工作的细节将很快发表出来,而且他计划与声学专家合作以改善他的设计。
许多机器人学家认为,不太可能有一个普适的抓握解决方案。Rus指出,即使机器人能达到人类的灵巧程度, “还有很多东西是人类的手也无法抓取的。”但是随着机器人抓握能力的不断提升,越来越多目前由人类执行的任务将通过自动化方式完成。
去年发表的一份报告估计,大多数职业至少可以实现部分自动化。但Goldberg强调,研究机器人不是为了让人们失业。“我的目标不是让机器人取代人类,”他说,“而是让机器人协助人类。”
不管结果如何,我们还需要取得大量研发进步才能真正迎来机器人革命。虽然Leitner团队去年赢得了亚马逊机器人挑战赛,但其机器人手臂在比赛的第一天就摔坏了,而且大多数团队也都遭遇了各式各样的技术问题。“这些系统还不是非常稳健,” Leitner说,“如果你要在亚马逊仓库里使用它,我无法保证它实际能工作多久。”
“我仍然处在探索新世界的途中,”Brock说,“还没有准备好走到聚光灯下,左右工业应用的发展。”但是,正如Goldberg所说,“实际应用已无阻碍,它已经开始发生了。”
-
nao机器人与其他机器人的区别2015-02-13 0
-
敢对你Say NO的机器人,怕吗?2015-12-09 0
-
不完美的伴侣机器人?2015-12-28 0
-
无刷直流电机驱动机器人手指设计2016-01-14 0
-
震惊!模块细胞机器人!最接近人类的机器人!2016-01-22 0
-
机器人将取代人类,你觉得呐?2016-03-09 0
-
人工智能机器人大战即将开启,机器人世界主导,机器人是否能赋予如人类一般的情感。2016-11-22 0
-
人类与机器人有感情产生吗?2017-11-10 0
-
人类与人工智能机器人合作的前景2018-04-16 0
-
如何打造出与人类自然交流的机器人?2020-10-22 0
-
机器人是什么?2022-03-31 0
-
智能机器人灵巧手的研究2015-12-25 539
-
正是有这些一直在坚守工匠精神的企业,国产工业机器人才得以迎头赶上进口品牌2018-09-20 1797
-
新传感器技术的出台 让机器人与人类的手指极其相似2020-02-27 716
-
协作机器人:将机器肌肉与人类灵巧性相结合2023-01-05 878
全部0条评论

快来发表一下你的评论吧 !
