

队列的基本概念!从队列到串口缓冲区的实现
电子说
描述
队列的概念
在此之前,我们来回顾一下队列的基本概念:队列 (Queue):是一种先进先出(First In First Out ,简称 FIFO)的线性表,只允许在一端插入(入队),在另一端进行删除(出队)。
队列的特点
队列的常见两种形式
普通队列
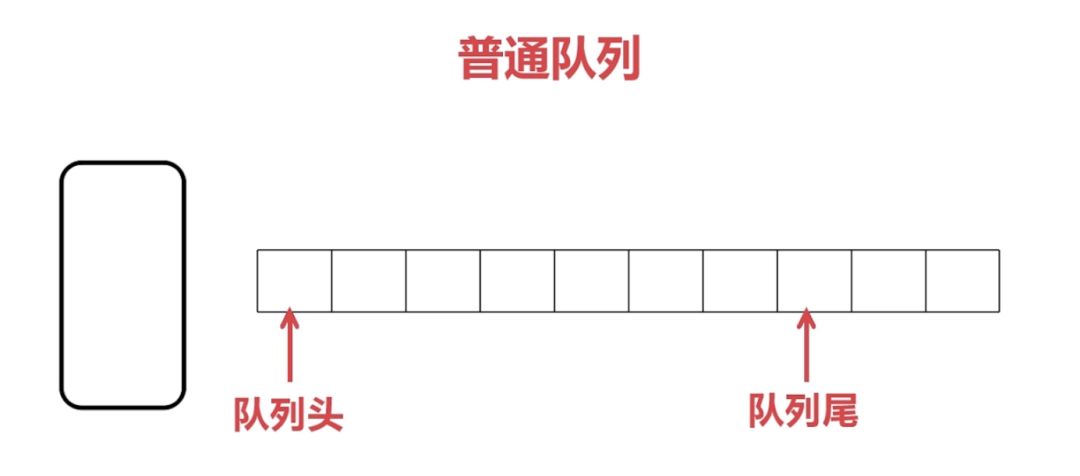
在计算机中,每个信息都是存储在存储单元中的,比喻一下吧,上图的一些小正方形格子就是一个个存储单元,你可以理解为常见的数组,存放我们一个个的信息。
当有大量数据的时候,我们不能存储所有的数据,那么计算机处理数据的时候,只能先处理先来的,那么处理完后呢,就会把数据释放掉,再处理下一个。那么,已经处理的数据的内存就会被浪费掉。因为后来的数据只能往后排队,如过要将剩余的数据都往前移动一次,那么效率就会低下了,肯定不现实,所以,环形队列就出现了。
环形队列
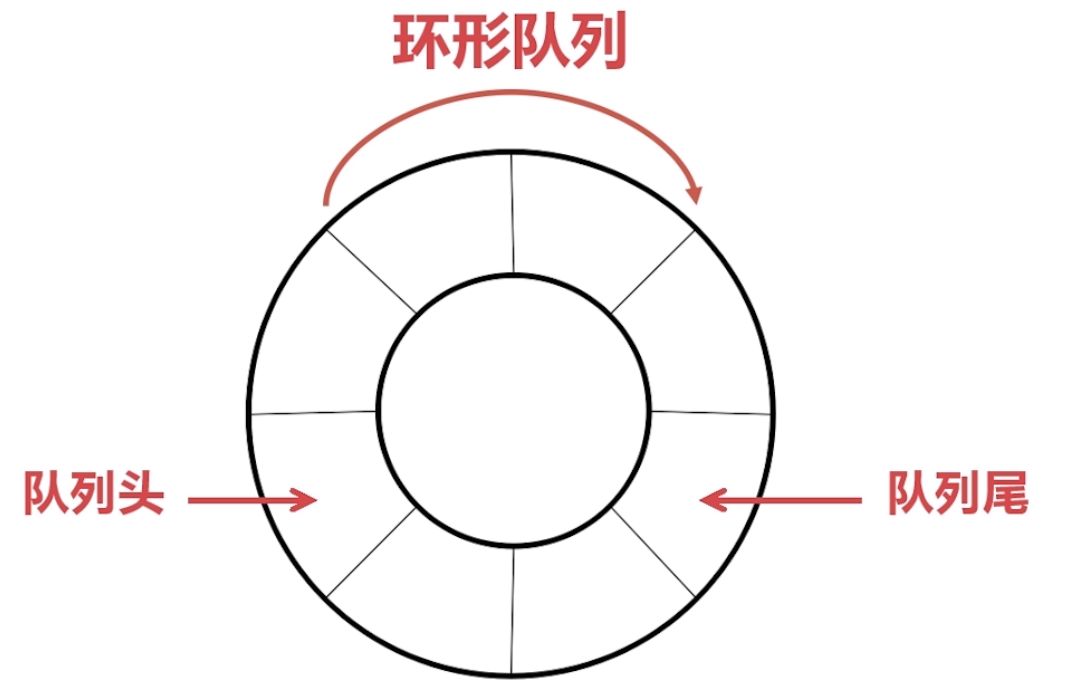
它的队列就是一个环,它避免了普通队列的缺点,就是有点难理解而已,其实它就是一个队列,一样有队列头,队列尾,一样是先进先出(FIFO)。我们采用顺时针的方式来对队列进行排序。
队列头 (Head) :允许进行删除的一端称为队首。队列尾 (Tail) :允许进行插入的一端称为队尾。
环形队列的实现:在计算机中,也是没有环形的内存的,只不过是我们将顺序的内存处理过,让某一段内存形成环形,使他们首尾相连,简单来说,这其实就是一个数组,只不过有两个指针,一个指向列队头,一个指向列队尾。指向列队头的指针(Head)是缓冲区可读的数据,指向列队尾的指针(Tail)是缓冲区可写的数据,通过移动这两个指针(Head) &(Tail)即可对缓冲区的数据进行读写操作了,直到缓冲区已满(头尾相接),将数据处理完,可以释放掉数据,又可以进行存储新的数据了。
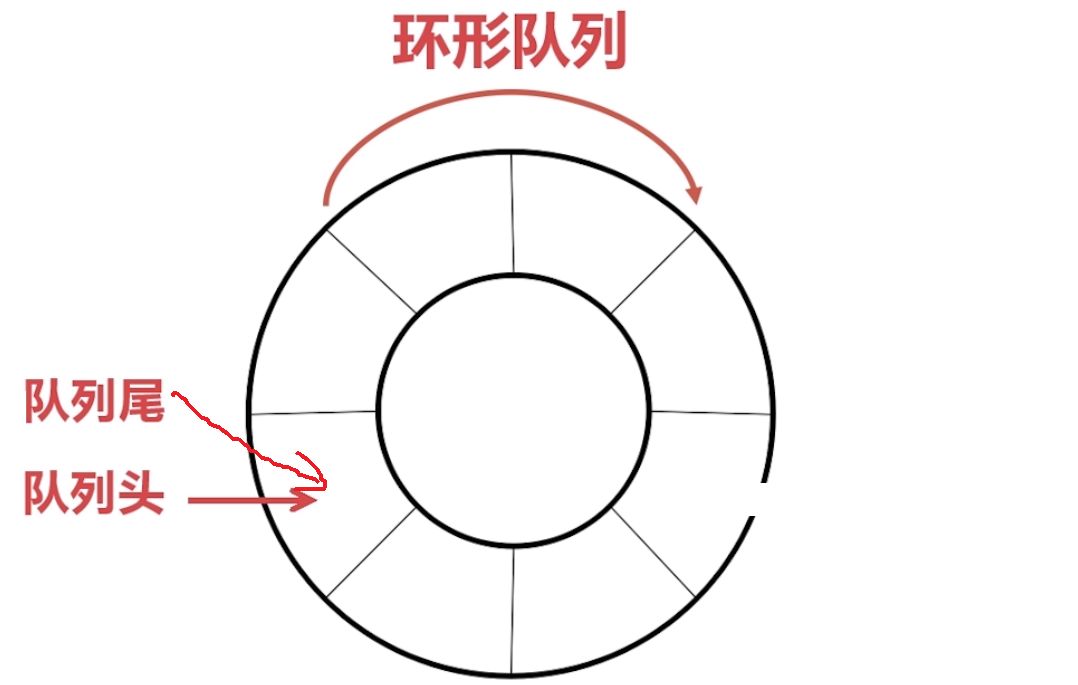
实现的原理:初始化的时候,列队头与列队尾都指向0,当有数据存储的时候,数据存储在‘0’的地址空间,列队尾指向下一个可以存储数据的地方‘1’,再有数据来的时候,存储数据到地址‘1’,然后队列尾指向下一个地址‘2’。当数据要进行处理的时候,肯定是先处理‘0’空间的数据,也就是列队头的数据,处理完了数据,‘0’地址空间的数据进行释放掉,列队头指向下一个可以处理数据的地址‘1’。从而实现整个环形缓冲区的数据读写。
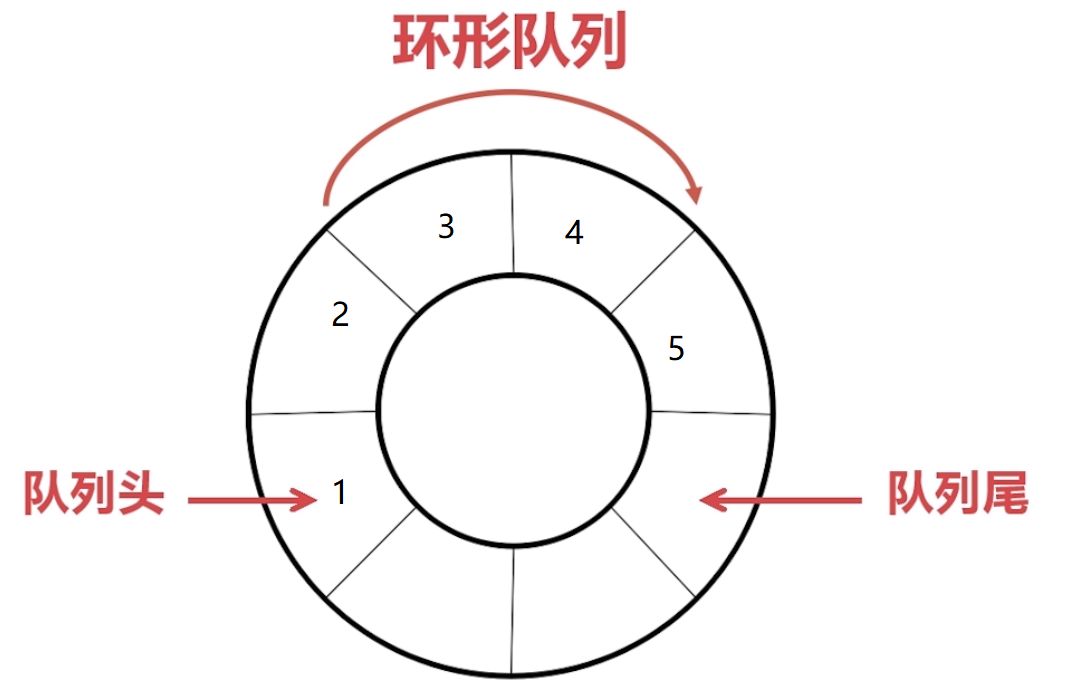
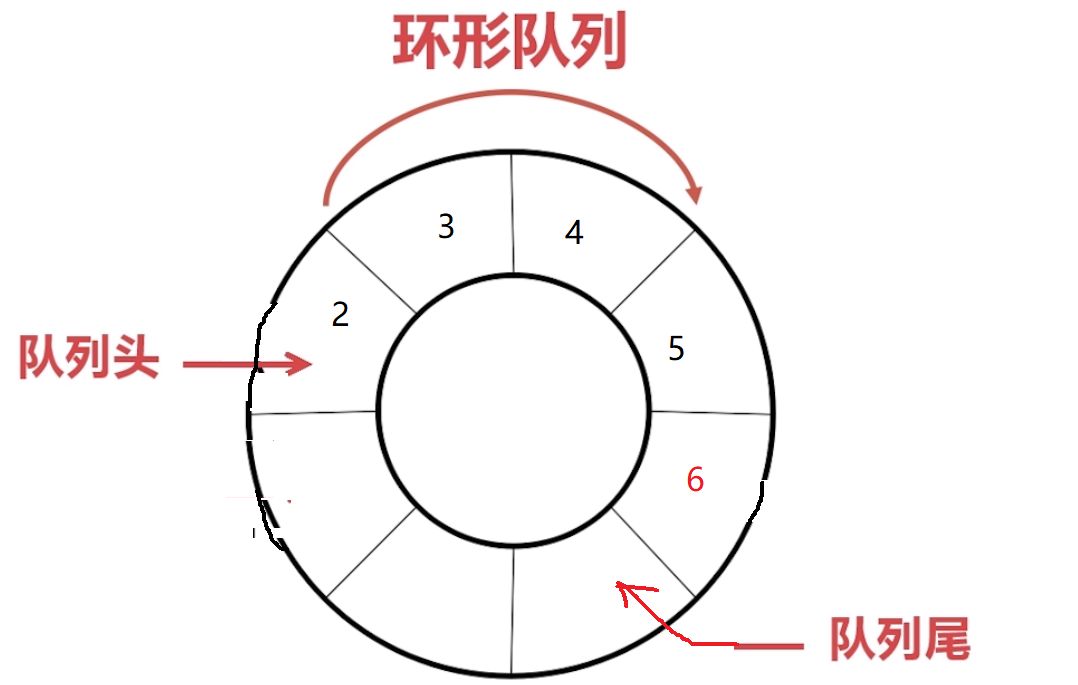
看图,队列头就是指向已经存储的数据,并且这个数据是待处理的。下一个CPU处理的数据就是1;而队列尾则指向可以进行写数据的地址。当1处理了,就会把1释放掉。并且把队列头指向2。当写入了一个数据6,那么队列尾的指针就会指向下一个可以写的地址。
如果你懂了环形队列,那就跟着歌曲来一步步用代码实现吧:
从队列到串口缓冲区的实现
串口环形缓冲区收发:在很多入门级教程中,我们知道的串口收发都是:接收一个数据,触发中断,然后把数据发回来。这种处理方式是没有缓冲的,当数量太大的时候,亦或者当数据接收太快的时候,我们来不及处理已经收到的数据,那么,当再次收到数据的时候,就会将之前还未处理的数据覆盖掉。那么就会出现丢包的现象了,对我们的程序是一个致命的创伤。
那么如何避免这种情况的发生呢,很显然,上面说的一些队列的特性很容易帮我们实现我们需要的情况。将接受的数据缓存一下,让处理的速度有些许缓冲,使得处理的速度赶得上接收的速度,上面又已经分析了普通队列与环形队列的优劣了,那么我们肯定是用环形队列来进行实现了。下面就是代码的实现:
①定义一个结构体:
1typedef struct2{3 u16 Head; 4 u16 Tail;5 u16 Lenght;6 u8 Ring_Buff[RINGBUFF_LEN];7}RingBuff_t;8RingBuff_t ringBuff;//创建一个ringBuff的缓冲区
②初始化结构体相关信息:使得我们的环形缓冲区是头尾相连的,并且里面没有数据,也就是空的队列。
1/** 2* @brief RingBuff_Init 3* @param void 4* @return void 5* @author 杰杰 6* @date 2018 7* @version v1.0 8* @note 初始化环形缓冲区 9*/10void RingBuff_Init(void)11{12 //初始化相关信息13 ringBuff.Head = 0;14 ringBuff.Tail = 0;15 ringBuff.Lenght = 0;16}
初始化效果如下:
写入环形缓冲区的代码实现:
1/** 2* @brief Write_RingBuff 3* @param u8 data 4* @return FLASE:环形缓冲区已满,写入失败;TRUE:写入成功 5* @author 杰杰 6* @date 2018 7* @version v1.0 8* @note 往环形缓冲区写入u8类型的数据 9*/10u8 Write_RingBuff(u8 data)11{12 if(ringBuff.Lenght >= RINGBUFF_LEN) //判断缓冲区是否已满13 {14 return FLASE;15 }16 ringBuff.Ring_Buff[ringBuff.Tail]=data;17// ringBuff.Tail++;18 ringBuff.Tail = (ringBuff.Tail+1)%RINGBUFF_LEN;//防止越界非法访问19 ringBuff.Lenght++;20 return TRUE;21}
读取缓冲区的数据的代码实现:
1/** 2* @brief Read_RingBuff 3* @param u8 *rData,用于保存读取的数据 4* @return FLASE:环形缓冲区没有数据,读取失败;TRUE:读取成功 5* @author 杰杰 6* @date 2018 7* @version v1.0 8* @note 从环形缓冲区读取一个u8类型的数据 9*/10u8 Read_RingBuff(u8 *rData)11{12 if(ringBuff.Lenght == 0)//判断非空13 {14 return FLASE;15 }16 *rData = ringBuff.Ring_Buff[ringBuff.Head];//先进先出FIFO,从缓冲区头出17// ringBuff.Head++;18 ringBuff.Head = (ringBuff.Head+1)%RINGBUFF_LEN;//防止越界非法访问19 ringBuff.Lenght--;20 return TRUE;21}
对于读写操作需要注意的地方有两个:
1:判断队列是否为空或者满,如果空的话,是不允许读取数据的,返回FLASE。如果是满的话,也是不允许写入数据的,避免将已有数据覆盖掉。那么如果处理的速度赶不上接收的速度,可以适当增大缓冲区的大小,用空间换取时间。
2:防止指针越界非法访问,程序有说明,需要使用者对整个缓冲区的大小进行把握。
那么在串口接收函数中:
1void USART1_IRQHandler(void) 2{3 if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断4 {5 USART_ClearITPendingBit(USART1,USART_IT_RXNE); //清楚标志位6 Write_RingBuff(USART_ReceiveData(USART1)); //读取接收到的数据7 }8}
测试数据没有发生丢包现象。
补充
对于现在的阶段,杰杰我本人写代码也慢慢学会规范了。所有的代码片段均使用了可读性很强的,还有可移植性也很强的。我使用了宏定义来决定是否开启环形缓冲区的方式来收发数据,移植到大家的代码并不会有其他副作用,只需要开启宏定义即可使用了。
1#define USER_RINGBUFF 1 //使用环形缓冲区形式接收数据 2#if USER_RINGBUFF 3/**如果使用环形缓冲形式接收串口数据***/ 4#define RINGBUFF_LEN 200 //定义最大接收字节数 200 5#define FLASE 1 6#define TRUE 0 7void RingBuff_Init(void); 8u8 Write_RingBuff(u8 data); 9u8 Read_RingBuff(u8 *rData);10#endif
当然,我们完全可以用空闲中断与DMA传输,效率更高,但是某些单片机没有空闲中断与DMA,那么这种环形缓冲区的作用就很大了,并且移植简便。同时大家也可以参考下下面这篇Gokit3.0 STM32源代码分析,会对这个机制理解更深。
-
RTOS的流缓冲区机制解析2025-02-14 1046
-
嵌入式环形队列与消息队列的实现原理2024-09-02 1813
-
C++环形缓冲区设计与实现2023-11-09 3848
-
基于C语言实现环形缓冲区/循环队列2023-04-11 4605
-
实现队列环形缓冲的方法2022-02-21 1494
-
STM32串口数据接收 --环形缓冲区2021-12-28 1882
-
STM32串口环形缓冲--使用队列实现(开放源码)2021-12-24 1094
-
STM32从队列到串口缓冲区的代码该如何去实现呢2021-12-08 1439
-
单片机串口——队列的使用2021-11-13 709
-
溢出队列缓冲区2020-03-24 1594
-
STM32串口环形缓冲区的实现2018-10-16 2706
-
MCU进阶之串口环形缓冲区实现2018-08-17 2217
-
STM32进阶之串口环形缓冲区实现2018-06-08 4004
全部0条评论

快来发表一下你的评论吧 !
