

STEVAL-ROBKIT1机器人评估套件技术解析
描述
STMicroelectronics STEVAL-ROBKIT1机器人评估套件是一款全功能套件,旨在为机器人技术和应用的开发提供平台。该套件采用模块化设计,包含三块板:主板、电机控制板和成像板。主板由STM32H725 MCU供电,其中集成了各种功能,同时控制电机板和成像板。电机板基于STM32G071微控制器,专门用于电机控制和驱动,利用电机驱动器调节机器人的运动速度和方向。成像板配有飞行时间(ToF)传感器和摄像头模块,可感知周围环境并与其进行智能交互。
数据手册:*附件:STMicroelectronics STEVAL-ROBKIT1机器人评估套件数据手册.pdf
惯性测量单元(IMU)和磁力计提供精确的定位和运动感知,可增强STMicro STEVAL-ROBKIT1的功能,对于动态环境中的导航和稳定性至关重要。低功耗BLUETOOTH ^®^ (BLE)模块让无缝无线通信更便利,支持移动接口控制。同时,可靠的固件使机器人能够自主移动,并允许用户运行不同的人工智能算法。
特性
- 模块化设计,用于不同机器人应用
- 六轴IMU传感器,用于加速度计
- 磁力计,实现位置精度
- 通过低失真数字麦克风,实现音频信号检测
- 通过蜂鸣器,实现声音指示
- LED和按键,用于用户界面
- 40引脚Raspberry Pi兼容GPIO连接器
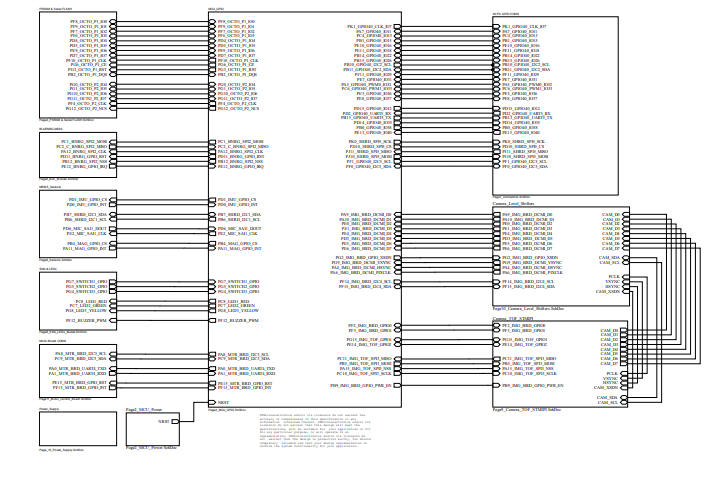
示意图
STEVAL-ROBKIT1机器人评估套件技术解析
核心架构与模块设计
STEVAL-ROBKIT1是STMicroelectronics推出的模块化机器人开发平台,由三块核心板卡构成:
- 主控板:搭载STM32H725高性能MCU(双核Cortex-M7/M4),集成PSRAM(64Mb)和串行Flash(128Mb),支持实时数据处理与复杂算法运行。
- 电机驱动板:基于STM32G071微控制器,集成STSPIN240电机驱动器,支持双路H桥控制,峰值电流达3.5A,具备编码器接口实现闭环控制。
- 感知板:集成ToF传感器(测距精度±1%)、单色摄像头(DCMI接口)及6轴IMU(LSM6DSV16BX),支持环境感知与导航。
关键硬件特性
- 传感器融合
- IMU+磁力计:LSM6DSV16BX(加速度计/陀螺仪)与LIS2MDLTR(磁力计)组合,提供9轴姿态解算,适用于SLAM应用。
- ToF传感器:SPI/I²C双模通信,最大测距4米,帧率30fps,支持障碍物与悬崖检测。
- 数字麦克风:MP34DT06JTR(SNR 64dB),用于声源定位或语音交互。
- 无线连接
- BLE 5.2:BlueNRG-M2SA模块(认证级),支持手机App远程控制。
- 扩展接口:40针Raspberry Pi兼容GPIO,集成I²C、UART、PWM等信号。
- 电源管理
- 宽电压输入(5.9V-45V),采用L6981(5V/3A)和L6982(3.3V/3A)DC-DC转换器,效率达92%。
- 低功耗设计:STM32H7支持动态电压调节(DVS),空闲模式电流<10μA。
典型应用场景
- 自主导航机器人
- 通过ToF+IMU实现室内建图(如ROS导航栈)。
- 电机驱动板支持PID调速,响应时间<1ms。
- AI视觉开发
- 摄像头输出720p@30fps,兼容OpenMV等图像处理框架。
- 主控板预留TensorFlow Lite Micro部署接口。
- 教育示教
- 模块化设计支持快速更换传感器(如替换为LiDAR)。
- 提供完整的Arduino/STM32CubeIDE开发示例。
开发资源与生态
- 软件支持
- STM32CubeMX配置工具:自动生成HAL库代码。
- 预装固件包:包含电机控制库(STM32 Motor Control SDK)和传感器驱动(X-CUBE-MEMS1)。
- 硬件扩展
- 支持STEVAL-MKI系列传感器插接(如气压计、气体传感器)。
- 兼容STM32 Nucleo扩展板(通过Morpx接口)。
设计建议
- PCB布局:电机驱动走线需短而宽(建议≥50mil),与信号线分层隔离。
- 散热优化:STSPIN240需敷铜并连接散热焊盘(热阻θJA=40°C/W)。
- EMC措施:电机电源回路添加220μF电解电容+100nF陶瓷电容组合滤波。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
STEVAL-L99615C评估套件技术解析与应用指南2025-10-25 1653
-
基于意法半导体 STEVAL-ROBKIT1 的机器人应用方案2025-06-30 1186
-
盘点#机器人开发平台2025-05-13 1630
-
ST NPI 专区 | 新开发套件 【STEVAL-ROBKIT1】 机器人应用评估平台2025-02-13 900
-
【教程1】人形街舞机器人-套件检测教程2022-08-12 9450
-
DIY一个机器人套件2022-08-03 1864
-
【开发教程1】人形街舞机器人-套件检测教程2022-04-22 4931
-
什么是TI-RSLK机器人系统学习套件2022-02-11 1308
-
工业机器人的技术原理2018-11-23 5127
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4151
-
机器人的主要技术参数2017-08-15 7564
-
【Landzo C1申请】基于Landzo C1 机器人套件智能遥控系统2016-05-24 3090
-
群舞蹈机器人表演2016-03-24 3101
-
【mBot申请】智能机器人的检测评估2015-11-30 2815
全部0条评论

快来发表一下你的评论吧 !
