

中伟视界:告别人工巡检,基于AI视觉的港口皮带机异物检测完整解决方案
电子说
描述
港口皮带异物检测项目方案
一、项目背景与必要性
港口运输系统中,皮带输送机作为关键设备,其安全运行直接关系到整个港口的作业效率与运营安全。在矿石、煤炭等运输过程中,金属杂物(如铲齿、钢筋)、大型异物(如木材、废弃轮胎)以及异常物料(如冻块、超大石块)混入运输物料的情况时有发生。这些异物可能导致皮带纵向撕裂、托辊损坏甚至电机过载故障,造成每小时高达数万元的生产停滞损失。传统检测主要依赖人工巡检和机械式传感器,存在识别率低(<60%)、误报率高及响应延迟等问题,尤其在夜间、雾天等能见度低下工况时表现更为突出。

近年来的技术发展为解决这一难题提供了可能。人工智能视觉识别和边缘计算的突破性进展,配合服务端预警平台的及时联动,使高精度实时异物检测成为可能。智能化系统可将故障停机时间减少40%以上,同时降低70%的巡检人力成本。本方案旨在整合先进技术,构建一套全覆盖、高精度、快响应的皮带异物智能检测系统,为港口的安全生产增效降本,减少安全隐患,预防安全事故,提供可靠的技术保障。
二、系统总体设计
2.1 系统架构
本方案采用三级分布式架构(感知层、决策层、执行层),构建完整的“检测-分析-处置”闭环系统。系统通过前端传感网络实时采集数据,边缘节点进行初步处理,服务端平台执行深度分析和策略制定,最终通过控制系统执行相应动作,实现全流程智能化管理。
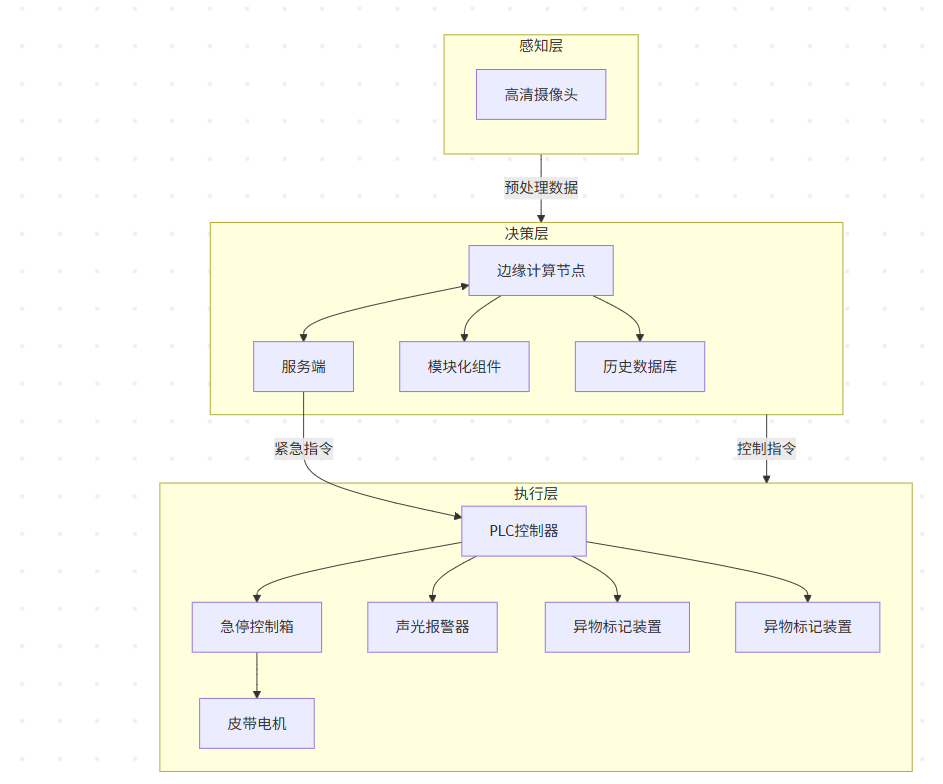
感知层: 由黑光全彩超级宽动态变焦高清摄像机(200万像素以上,帧率≥25fps)。设备以间距≤50米的密度部署于皮带沿线,重点覆盖转运站、卸料口等高风险区域,实现运输全过程无死角监控。
决策层: 采用边缘计算、模块化部署、服务端协同计算架构。边缘侧部署轻量化推理模型,实现毫秒级实时响应,采用模块化部署,各模板独立运行,且与皮带控制系统PLC直接连接,第一时间联动PLC系统;服务端建立深度神经网络模型,通过持续学习机制提升识别准确率。系统支持动态阈值调整,可根据物料类型(矿石/煤炭/粮食)、环境条件(白天/夜晚/雨雾)优化检测参数。
执行层: 整合皮带机PLC控制系统和急停模块,支持分级响应机制:异物预警→声光报警→自动减速→紧急停机,实现精准化、梯度化处置,并通过短信、电话联动平台,对不同等级事件自动通知相关人员。
三、核心模块实现
3.1 基于AI视觉的异物检测
图像采集优化: 系统配置黑光全彩超级宽动态变焦高清摄像机(200万像素以上,帧率≥25fps),解决逆光、光线不佳、粉尘干扰问题。采用主动红外补光技术(波长850nm),有效提升夜间和隧道区域的图像质量,使全天候识别准确率保持稳定。针对港口高粉尘环境,特别设计自清洁防护罩,配备自动雨刮,确保持续获得清晰图像。
深度学习识别: 采用改进的YOLOv8-MSA模型,针对典型异物进行专项优化:
主干网络引入MobileViT轻量化设计,减少计算量40%
添加注意力机制模块(CBAM),提升小目标识别能力
输出层采用自适应锚框技术,适应不同形状异物
模型训练采用合成数据增强技术,生成10万+标注样本(涵盖金属、木材、绳索等20类异物),结合迁移学习(基于COCO数据集预训练),在测试集上达到98.2%的mAP值。
3.2 边缘计算部署
为实现实时响应,系统采用边缘计算、模板化部署、服务端协同计算架构:
边缘节点: 搭载国产化海思芯片模组,运行轻量化推理模型,执行实时异物检测(处理延时<50ms)。当检测到高风险异物(如金属长杆)时,可在极短时间内触发紧急停机。
模块化部署: 各模块独立运行,独立部署,也可集中部署和控制,与PLC系统直接连接,可输出MODBUS协议,第一时间与PLC系统互动,减少延时。
服务端平台: 基于宝塔容器化部署,提供即时预警、报警联动、模型训练、大数据分析及预测性维护功能。系统分析历史数据,建立故障预测模型,提前发现潜在风险点。
4.系统集成与联动控制
检测系统与港口现有PLC控制网络深度集成,通过MODBUS协议实现安全通信。设计分级响应机制,实现精准化处置:
一级预警(低风险): 如发现小型塑料、纸屑等无害异物,系统记录位置并后台告警,皮带维持正常运行
二级响应(中风险): 检测到可能造成卡堵的异物(如木块、橡胶),自动触发料流调整(降低带速至50%)并发出声光报警
三级急停(高风险): 识别到金属异物、尖锐物等高风险物体时,200ms内触发急停回路,同时联动上游设备停机,避免事故扩大
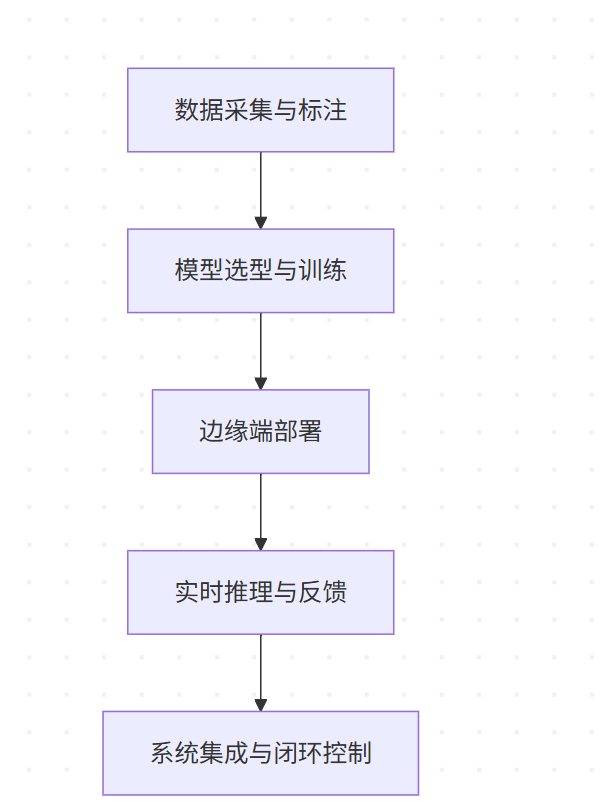
四、整体实现流程图
五、分步骤详解
步骤1:数据采集与标注(核心基础)
数据源:
真实场景: 港口皮带固定点位摄像头(分辨率≥1080P,帧率25fps)
覆盖条件: 晴/雨/雾/昼/夜、各种异物在不同物料、不同位置
标注要求:
检测标注: 异物、皮带有料、皮带无料
分类标注: 不同异物分类标注名称
困难样本标注: 异物不同程度被物料覆盖,显露出不同形状及颜色,尽量多的覆盖已知物料
数据量要求: 初始数据集 ≥ 5000张图像
步骤2:模型训练与调优
状态分类:
输入: 检测模型输出已知物料
关键技巧:
局部特征增强: 对皮带区域位置做局部放大
多尺度特征融合: 将浅层细节(边缘/纹理)与深层语义特征拼接
边缘端部署:
步骤3:实时推理与反馈机制
动态阈值处理: 当分类置信度 < 0.9时,触发多帧验证机制(连续3帧结果一致才输出)
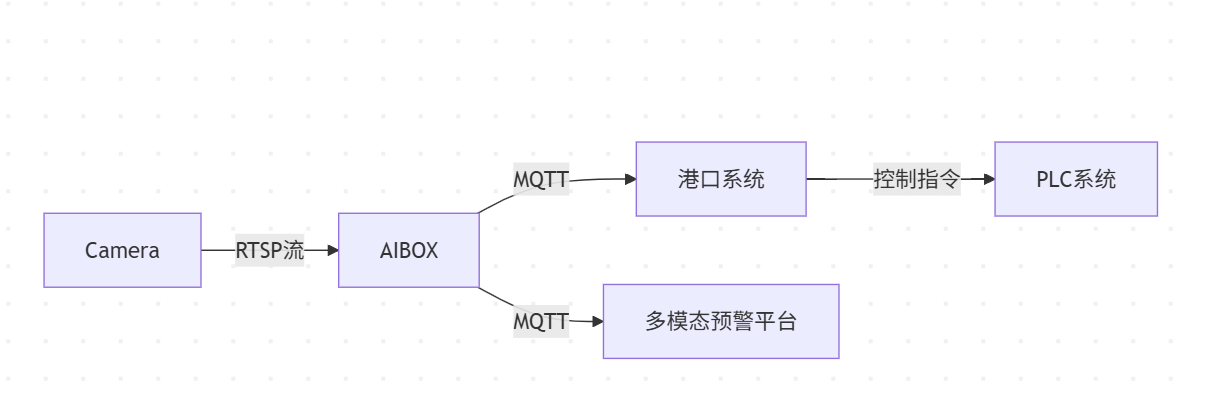
多目标分层次检测: 物料、异物多目标分层次检测,先检测到皮带上有无物料,确定皮带上有物料的状态下再检测有无异物,当检测到有异物后上报港口系统和多模态预警平台;当检测到有物料的情况下,发现与物料有较大状态和颜色区别时,而且不为已知物料,则上报港口系统和多模态预警平台为未知异物。
步骤4:系统集成与闭环控制
与港口系统对接:
识别到 “异物”→ 触发PLC系统,根据不同异物等级联动不同功能
多模态预警平台
检测到 “异物” → 现场声光报警 + 中控台弹窗
短信、电话自动通知相关人员
自学习闭环:
边缘设备收集低置信度样本 → 增量训练模型 → 推送更新至边缘端
实现流程的核心要点
数据为先: 覆盖极端场景的工业数据集是模型鲁棒性的根基
模型轻量化: 边缘端部署必须平衡精度与速度
闭环设计: 从识别→控制→自学习的全链路自动化
最终目标: 实现“无人干预”的皮带异物感知-决策-执行闭环,推动港口真正迈向“黑灯工厂”。
六、总结
本方案通过AI视觉检测和智能联动控制技术创新,构建了港口皮带运输异物检测的完整解决方案。
未来技术演进将聚焦以下方向:
多模态大模型应用 :探索基于GPT-4o架构的港口通用视觉模型,实现更精准的异常推理
跨设备协同: 实现无人机-巡检机器人-固定监控的“空天地”一体化监测,覆盖100%盲区
港口皮带运输异物智能检测系统不仅是技术升级,更是推动港口安全绿色转型的核心引擎。通过持续技术创新与数据积累,该系统将为构建“零事故、零排放”的智慧港口提供坚实保障。
审核编辑 黄宇
- 相关推荐
- 热点推荐
- AI视觉
-
AI视觉检测在工业领域的应用2023-06-15 4438
-
皮带机综合保护器电路图2009-05-20 10107
-
艾默生工控产品在皮带机启动控制中的应用2009-06-13 1236
-
英威腾变频器在煤矿皮带机的研究2017-10-09 788
-
浅谈皮带机减速机漏油的7种情况2018-07-03 2773
-
如何修复皮带机轴磨损问题2021-09-15 1418
-
变频器在井下皮带机上的应用2022-11-24 3012
-
智能AI算法解决各行业中的皮带跑偏、异物问题等有效方法2023-12-09 1717
-
挂轨巡检机器人在发电厂与煤矿皮带机场景的应用2024-09-08 1572
-
中伟视界:皮带异物识别AI摄像头,安全生产的智能化转型2024-12-19 1329
-
中伟视界:智能化皮带异物检测技术在矿业中的创新应用2025-05-16 1207
-
无线数传模块助力港口设备联动,解决皮带机与斗轮机协同困境2025-09-11 883
-
中伟视界:AI视觉在港口苫布管理中的应用实践2025-12-18 755
-
港口皮带机智能监控运维系统方案2025-12-30 509
-
尿素皮带秤AI视觉异物检测识别报警一体化可远程查看技术方案2026-07-10 50
全部0条评论

快来发表一下你的评论吧 !
