

浅析模拟触觉传感器原理及应用
描述
模拟触觉传感器是一种柔顺器件,它的输出正比于局部力。图6. 18所示,为这种器件的一 种最简单的结构:一个弹簧加力杆与一个转轴相连,由于横向力引起的弹簧位移导致转轴成比 例地旋转。转角可用电位计连续测董,或用码盘作数字式测量。根据弹簧的弹性系数,便可求得 与位移相应的力。
过去几年中;人们花费了很多精力开发蝕觉阵列,这种阵列能获得比单个传感器更大区域 的触觉信息,图6. 19说明了这种器件的应用,图中示出了一个机械手,在每个手指的内表面都 复盖了觖觉阵列.机械手外表商的传感片是典型的二值器件,其功能已在6. 4.1节的结尾做了

虽然传感阵列可由若干审个传感器组成,但处理这一问题的最好方法晕构成一个由甩极 组成的阵列,电极与柔性导电材料(例如石墨基物质)保持电器接触,导电材料的电阻随力而 变化。这种器件往往称为人造皮肤.当物体压在其表面上时,将引起局部变形*测出连续的电阻变化,就可測量埼部变形,电阻的改变很容易转换成电信号,其幅值正比于施加在材料表面上某一点的力。

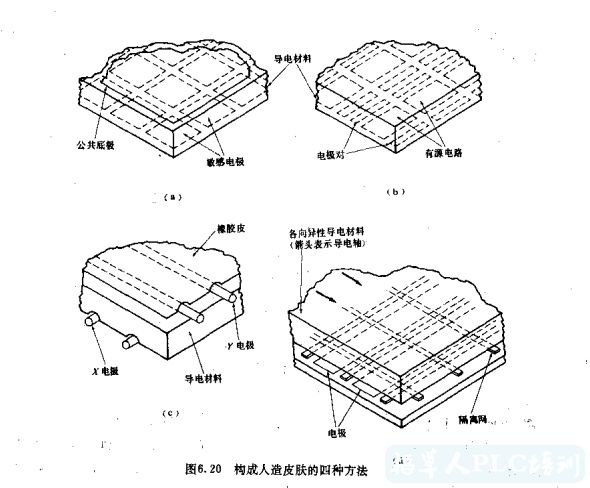
图6.20给出了构成人造皮肤的几种基本方法,图6. 20a所示的方案基于“窗U”概念,特点 是在公共底板和电极阵列之间夹着导电材料,电极阵列蚀刻在一块玻璃纤维印刷电路板上。每 个电极是一矩形区域(因此称为窗口 ),该区域便构成一个触点。从公共底板流向每个电极的电 流是导电材料所受压力的函数。
图6.20b所示的方法中,窄长的电极对和用大规模集电歸技术制怍的有源电路厂起放在同一基片上导电材料位乎_片的上面,除与电极相通,与基片的故它部分是绝缘的。测量由于材料受压而引起的电阻变化,并由电极对之间的有源电路转换成电信图6. 20c此所示为另一神可技的方法七这种方法中,导电材嵙位于龠畢直相交的细直韧性 电极砗列之间。中间用导电材嵙隔开的每个交点便是一个敏感点。可用如下方法测量由于材料受压而引起的电阻变化:激励一个阵列的电极(每次一个电极):,然后测量流过另一阵列单元的电流。每个单元上电流的幅值正比干该单元和受激单元间材料所受的压力。
最后,因6. 20d所示方案需要使用一种各向异性的导电材料。这珅材料具有单向导电持性。这种传感器由位于底板上的细$形电极的线状阵列所构成导电材料位于该阵列上面,导 电方向垂直于电板并且用一网状物将导电材料与电极分开,以保证在没有外力怍用时它们之 间甲互相接触。随着力的增大,接触面积也增大,使得电阻降低。号图6.20c所示方法一样,一 个阵列由外部激励并测量另一阵列产生的电流.应当指出,触觉灵敏度取择于隔离用网状物的厚度
图6.20c和d所示的方法需要依次激廊其中一个阵列的元素,这种方法通常会产生一困难问题,即由于改变电流路径会引起“交叉”感应,使得对复杂的接触模式所输出的信号难以作出准确的解释。解决此问题的一种方法是、在每个交叉点处放一个二极管以消除流经其它路径 的电流。另一种方法是除了被激励的单元外,将所有其它路径接地。逐个扫描接收阵列的路径,我们基本上可以“看”到每个单元交叉点所起的作用。
到此为止,所讨论的各种触觉传感器都涉及到测量垂直于传感表面的外力。测量切向运 动,以确定是否有滑动,是触觉传感器另一重要应用。在结束本节前,我们简要地介绍Bejczy [1980]所建议的用检测滑动方向和大小的一神方法.图6. 21所示的器件包括一个表面有凹陷可自由运动的小球,它可以使一个固定在导电盘轴上的细杆偏斜。在导电盘下均勻地放置若干电触点,物体在球上滑动将导致球的旋转,而球的旋转则会使细杆和圆盘以一定频率振动, 该频率正比于球的转速,转动的方向确定哪个触点与振动的圆盘接触,相应的电路产生脉冲,分析得到的信号就可确滑动的平均方向 "
- 相关推荐
- 热点推荐
- 传感器
-
仿生触觉传感器:触碰未来的科技奇迹2025-03-05 1112
-
工业机器人的触觉传感器有哪些?传感器作用是什么?2024-03-11 2063
-
一种模拟皮肤触觉的柔性仿生光纤触觉传感器2023-11-24 3066
-
什么是触觉传感器?触觉传感器如何工作?2023-08-29 6179
-
浅析拉力传感器校准过程2022-03-11 3341
-
浅析称重传感器的主要构成元件2021-12-20 1597
-
触手可知—人工传感器模拟人体触觉2020-12-26 1229
-
基于传感器及触觉研究的尖端前沿图像系统设计2019-03-29 505
-
传感器应用在触觉前沿图像系统设计2018-11-01 2108
-
基于传感器的触觉设计应用2017-09-14 1040
-
基于光学的触觉传感器电路设计_张贵相2017-03-19 1010
-
浅析霍尔电流传感器的应用2012-08-14 4477
-
[分享][下载]美国PPS触觉传感器有限公司2009-12-16 4110
全部0条评论

快来发表一下你的评论吧 !
