

教你i.MX RT1052的开源AutoQuad飞控
电子说
描述
【背景描述】
AutoQuad是德国的一款老牌开源飞控(硬件闭源),其旨在提供稳定、动态飞行和自动驾驶功能的飞控控制器。
由于AutoQuad硬件闭源的特性,国内的玩家很少,但AutoQuad 的ukf算法“独步天下”,绝对是一绝,我对其垂涎已久。15年时我自己做出了Autoquad的M4版本硬件(基于stm32f405rgt6),可以运行官方源码。
17年时我将Autoquad移植到mdk环境下并且将其rtos替换为RT-Thread。后续玩这个玩了蛮久时间,这个版本的AutoQuad有一个问题:由于UKF算法占用了很多cpu资源使得整个系统cpu占用率太高,再者就是片内ram资源捉襟见肘。
对于这个版本的AutoQuad目前有挺多模友想继续深入的开发,比如网名为“我的世界观”的网友想将L1自适应控制算法加入到其中,但这个L1自适应算法也是极耗费cpu资源的。在这个背景下我开始着手AutoQuad在imx-rt1052上的实现,以期留出足够的资源给大家来给模友们深入开发,同时我也借机熟悉下RT-Thread的3.x版本。
另外参加这个作品征集活动只是这个项目的开始,我后续会将成果放在github,欢迎大家一起来加入这个项目,继续延续AutoQuad的传奇。
【所用物料】
主控:
iMX-RT1052DVL6B
传感器:
ICM20602、SPL06、HMC5983
编译环境:
WIN10、MDK5.25
RT-Thread 版本:
3.0.4
实物图:
硬件板子目前基于野火1052 mini开发板,传感器是从马家买的现成模块,采用飞线的形式固定在开发板上(后期会重新设计一款小的适合飞控的板子)
主控+传感器
全部的连接都使用飞线(感谢火哥不杀之恩)
为了上盖能盖的下,将底板上的usb座和网络接口座去掉了(感谢火哥不杀之恩)
勉强能扣好
【硬件设计】
系统框图
硬件设计解析
A、传感器部分:
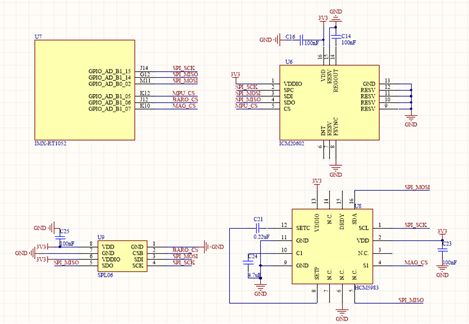
各个传感器接到IMX-RT1052的SPI3上,进行分时操作。
B、SBUS输入
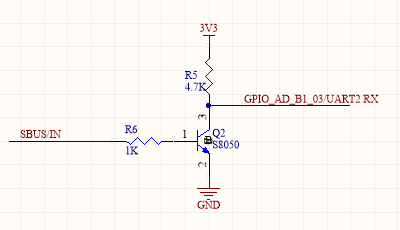
由于SBUS信号是一个反向电平的串口信号,这里使用一个三级管搭了一个简单的反向电路,从而将信号正确到接入到处理器的串口输入端。
C、PWM 信号输出
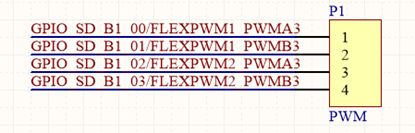
用于控制ESC的PWM信号,使用主控上PWM1和PWM2中的AB通道,这里3的意思是使用submode3。
D、GPS
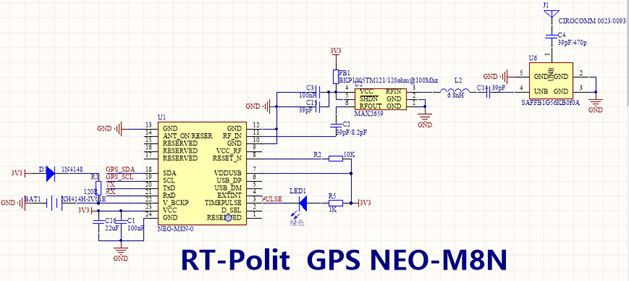
GPS模块是一个独立的单元,通过串口接到主控的串口5上,上图中的原理图是我早期时候设计的基于Ublox M8N的GPS模块,这里刚好用到。
【软件设计】
软件设计流程
整个AutoQuad源码是一个较大的系统,我这里抽丝剥茧,将其中的主脉络流程贴出来:
关键代码解析
此版和之前在stm32f405上的版本最大的区别在于加速度+陀螺仪传感器、磁力计、高度计的数据读取上。原版直接使用spi进行驱动,这个版本我使用了RT-Thread的SPI设备驱动框架来进行数据读取。
这里将加速度传感器&陀螺仪驱动源码列出来,进行一个简单解析:
1、将总线设备挂到总线上(配置CS引脚)
rt1050_spi_bus_attach_device("spi3", "spi32", 64);
此段代码表示将icm20602作为spi3上的第三个设备和spi总线进行关联,并使用 GPIO_AD_B1_05 作为其cs引脚(其中64代表 GPIO_AD_B1_05 ,即icm20602的cs引脚是 GPIO_AD_B1_05 )。
2、配置SPI总线相关参数
struct rt_spi_configuration cfg; cfg.data_width = 8; cfg.mode = RT_SPI_MODE_0 | RT_SPI_MSB; /* SPI Compatible: Mode 0 and Mode 3 */ cfg.max_hz = MPU6000_SPI_BAUD; /* 1M */ rt_spi_configure(spi_acc_gyro_device->rt_spi_device, &cfg);
3、对总线的互斥操作
为保证多个设备对spi3的互斥使用,需要对icm20602加入互斥锁操作:
static void sensor_lock(struct spi_acc_gyro_device * sensor_device) { rt_mutex_take(sensor_device->lock, RT_WAITING_FOREVER); } static void sensor_unlock(struct spi_acc_gyro_device * sensor_device) { rt_mutex_release(sensor_device->lock); }
4、寄存器的读写操作
static void icm20602_write_reg(uint8_t reg, uint8_t value) { uint8_t send_buffer[2]; send_buffer[0] = reg&0x7f; send_buffer[1] = value; rt_spi_send(spi_acc_gyro_device->rt_spi_device, send_buffer, 2); } static uint8_t icm20602_read_reg(uint8_t reg) { uint8_t rxBuf[2]; uint8_t txBuf[2]; txBuf[0] = reg|0x80; rt_spi_send_then_recv(spi_acc_gyro_device->rt_spi_device, txBuf, 1, rxBuf, 2); return rxBuf[0]; } static uint8_t icm20602_read_buffer(uint8_t reg, uint8_t *buffer, uint16_t len) { uint8_t txBuf[2]; uint8_t rxBuf[20]; sensor_lock(spi_acc_gyro_device); txBuf[0] = reg|0x80; rt_spi_send_then_recv(spi_acc_gyro_device->rt_spi_device, txBuf, 1, rxBuf, len); rt_memcpy(buffer, rxBuf, len); sensor_unlock(spi_acc_gyro_device); return 0; }
5、读取加速度和陀螺仪数据
static uint8_t icm20602_get_accel(int16_t *accel, int16_t *temp) { uint8_t buf[10]; icm20602_read_buffer(ICM20_ACCEL_XOUT_H,buf,8); accel[0] = ((int16_t)buf[0]<<8) + buf[1]; accel[1] = ((int16_t)buf[2]<<8) + buf[3]; accel[2] = ((int16_t)buf[4]<<8) + buf[5]; *temp = ((int16_t)buf[6]<<8) + buf[7]; //ICM_TRACE("acc0=%d, acc1=%d, acc2=%d ",accel[0],accel[1],accel[2]); return 0; } static uint8_t icm20602_get_gyro(int16_t *gyro) { uint8_t buf[8]; icm20602_read_buffer(ICM20_GYRO_XOUT_H,buf,8); gyro[0] = (buf[0]<<8) + buf[1]; gyro[1] = (buf[2]<<8) + buf[3]; gyro[2] = (buf[4]<<8) + buf[5]; // ICM_TRACE("gyro0=%d, gyro1=%d, gyro2=%d ",gyro[0],gyro[1],gyro[2]); return 0; }
因为 icm20602_read_buffer 函数内部已经加入了互斥,所以读取时不再需要互斥操作。
RT-Thread 使用情况
1、动态内存管理;
2、GPIO设备驱动架构;
3、RTC设备驱动架构;
4、SPI设备驱动架构;
5、SDIO设备驱动架构;
6、串口设备驱动架构;
7、MSH命令行;
8、FatFs文件系统。
-
飞凌嵌入式推出i.MX RT1052跨界开发板2018-08-31 0
-
求野火I.MX RT1052上手指南?2021-04-02 0
-
求正点原子号令者I.MX RT1052的上手指南?2021-04-02 0
-
恩智浦i.MX RTxxx系列MCU的特性2021-11-04 0
-
【资料】基于RT-Thread的四轴飞控项目汇总2022-03-28 0
-
如何使用Pendrive通过USB更新i.MX RT1052 EVK上的外部闪存固件?2023-04-11 0
-
I.MX RT1052代码执行在哪里?2023-11-09 0
-
i.MX RT1052的FLex通过FLI_ SPI(4-wire) 接口访问FPGA时,如何取消中间的闲置部分?2023-11-13 0
-
i.MX RT1052芯片的核心板,性能和代码详细资料概述2018-06-10 24958
-
野火电子基于RT-Thread的i.MX RT1052 EVK Pro板卡特点介绍2018-07-16 9217
-
i.MX RT1052对视频应用的支持2018-09-22 510
-
i.MX RT开发笔记-08 | i.MX RT1062嵌套中断向量控制器NVIC(按键中断检测)2021-12-01 614
-
RT-Thread文档_野火 I.MX RT1052上手指南2023-02-22 476
-
RT-Thread文档_正点原子 I.MX RT1052号令者上手指南2023-02-22 471
-
i.MX RT的FlexRAM配置问题2023-10-24 943

全部0条评论
快来发表一下你的评论吧 !