

如何在嵌入式FreeRTOS系统接口调用API?
电子说
1.4w人已加入
描述
1.在最近的嵌入式工作中很多都是学习FreeRTOS系统,由于只是会对RTOS的接口进行调用,但是很多时候都是知其然而不知其所以然,所以现在对API进行总结。
2.首先还是从main函数入口,main()函数创建任务,然后启动调度器
大概的格式如下:

3.在 FreeRTOS 中,多线程被称为多任务,在这里任务可以看得和线程相同。(其实并不相同)
首先创建任务的接口:
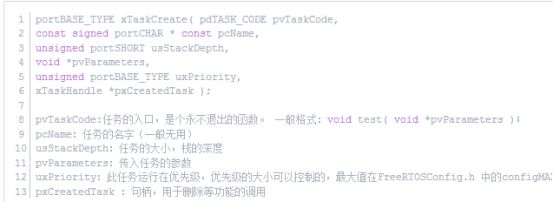
如:

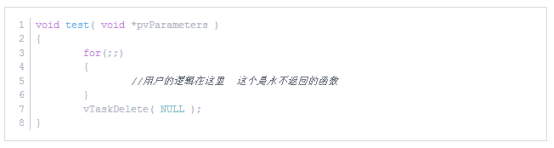
调用的函数demo如下:
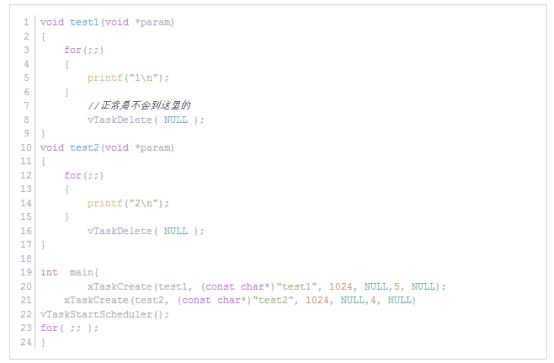
上面是对两个接口的简单介绍,下面是注意的事项。
(1) :每个任务的执行必要要有延时,如果没有延时,那么会出现单个任务一直占用CPU的现象。比如说下面的代码逻辑就会出现一直在运行任务一的现象;

(2) 由于多任务是使用的时间片轮转的方式调用,如果优先级高的任务占用的时间片过多,那么低优先级的任务会出现饿死状态。
(3) (3)时间片的长度通过心跳中断的频率进行设定,心跳中断频率由FreeRTOSConfig.h 中的编译时配置常量 configTICK_RATE_HZ 进行配置。比如说,如果 configTICK_RATE_HZ 设为 10(HZ),则时间片长度为 100ms
(4)优先级是在FreeRTOS是可以通过调用API进行修改的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
什么是嵌入式操作系统?2025-12-09 1435
-
FreeRtos于嵌入式环境的应用2022-11-18 1873
-
嵌入式实时操作系统FreeRTOS基本概述2022-02-16 1589
-
嵌入式操作系统FreeRTOS的原理与移植实现2021-08-04 2232
-
基于FreeRTOS的嵌入式云台控制系统设计2021-07-30 1921
-
FreeRTOS中的API函数功能分析及调用方法2021-03-26 1068
-
嵌入式操作系统FreeRTOS内存如何管理和堆2020-01-10 6493
-
在FreeRTOS中如何调用API2019-06-23 2293
-
基于RTSJ的实时嵌入式系统API的优化研究2017-11-30 580
-
基于FreeRTOS的嵌入式实时操作系统的原理和实现2017-11-18 7528
-
Linux系统调用及用户编程接口API分析2017-10-18 1085
-
汽车电子嵌入式软件接口库设计2011-01-23 825
全部0条评论

快来发表一下你的评论吧 !
