

zynq中三种实现GPIO的方式
描述
MIO和EMIO方式是使用PS部分的GPIO模块来实现GPIO功能的,支持54个MIO(可输出三态)、64个输入和128个输出(64个输出和64个输出使能)EMIO
而IP方式是在PL部分实现 GPIO功能,PS部分通过M_AXI_GP接口来控制该GPIO IP模块;另外EMIO模块虽然使用PS部分GPIO但也使用了PL部分的管脚资源。
MIO方式实现GPIO
vivado中zynq设置如下图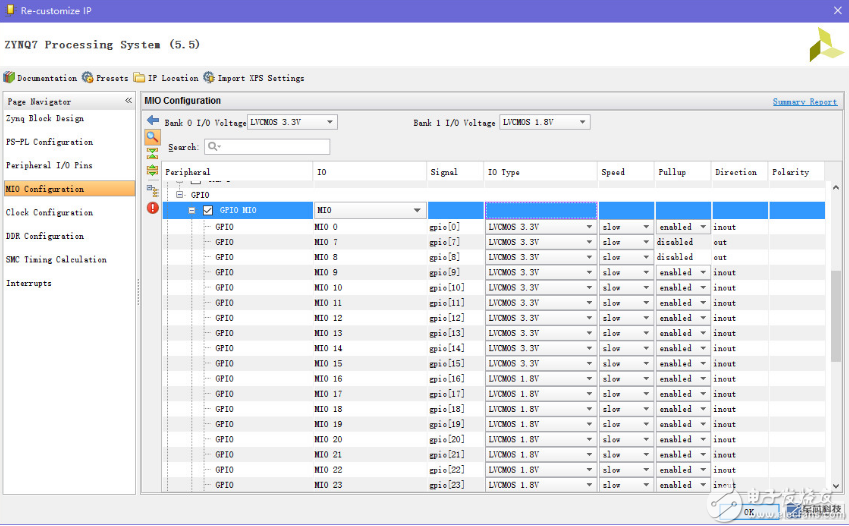
由图中可见要选中打开GPIO,其下自动显示可用于GPIO的MIO(当MIO作为其他功能时就不能作为GPIO使用了),其中MIO 7、MIO 8只能作为输出使用,因为它们用于VMODE管脚
软件部分如下
#include
#include "platform.h"
#include "xgpiops.h"
#define LED1 0
#define LED2 9
static void delay(int dly)
{
int i, j;
for (i = 0; i < dly; i++) {
for (j = 0; j < 0xffff; j++) {
;
}
}
}
int main()
{
int Status;
XGpioPs_Config *ConfigPtr;
XGpioPs Gpio;
init_platform();
ConfigPtr = XGpioPs_LookupConfig(XPAR_PS7_GPIO_0_DEVICE_ID);
Status = XGpioPs_CfgInitialize(&Gpio, ConfigPtr,
ConfigPtr->BaseAddr);
if (Status != XST_SUCCESS){
return XST_FAILURE;
}
XGpioPs_SetDirectionPin(&Gpio, LED1, 1);
XGpioPs_SetDirectionPin(&Gpio, LED2, 1);
XGpioPs_SetOutputEnablePin(&Gpio, LED1, 1);
XGpioPs_SetOutputEnablePin(&Gpio, LED2, 1);
while (1) {
XGpioPs_WritePin(&Gpio, LED1, 0);
XGpioPs_WritePin(&Gpio, LED2, 1);
delay(1000);
XGpioPs_WritePin(&Gpio, LED1, 1);
XGpioPs_WritePin(&Gpio, LED2, 0);
delay(1000);
}
cleanup_platform();
}
EMIO方式实现GPIO
vivado中zynq设置如下图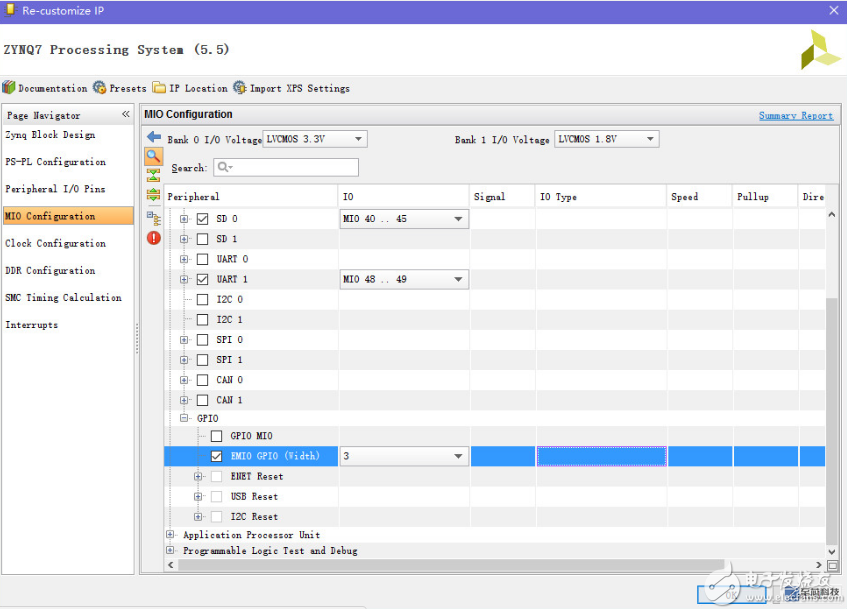
图中可知GPIO中选择使用EMIO,并选择位宽(这里例子中选择3);其vivado中连接如下图
上图可知除了FIXED IO和DDR接口外,还多了3个3对(一个输入,一个输出和一个输出使能)GPIO管脚。
不同于MIO,这里三个IO管脚(一个输入,一个输出和一个输出使能在自动生成的顶层模块中合并为一个IO)要绑定到芯片对应管脚上
软件部分如下
#include
#include "platform.h"
#include "xgpiops.h"
#define LED_R 54
#define LED_G 55
#define LED_B 56
#define LED_ON 0
#define LED_OFF 1
static void delay(int dly)
{
int i, j;
for (i = 0; i < dly; i++) {
for (j = 0; j < 0xffff; j++) {
;
}
}
}
int main()
{
int Status;
XGpioPs_Config *ConfigPtr;
XGpioPs Gpio;
init_platform();
ConfigPtr = XGpioPs_LookupConfig(XPAR_PS7_GPIO_0_DEVICE_ID);
Status = XGpioPs_CfgInitialize(&Gpio, ConfigPtr,
ConfigPtr->BaseAddr);
if (Status != XST_SUCCESS) {
print("cfg init err\n");
return XST_FAILURE;
}
XGpioPs_SetDirectionPin(&Gpio, LED_R, 1);
XGpioPs_SetOutputEnablePin(&Gpio, LED_R, 1);
XGpioPs_SetDirectionPin(&Gpio, LED_G, 1);
XGpioPs_SetOutputEnablePin(&Gpio, LED_G, 1);
XGpioPs_SetDirectionPin(&Gpio, LED_B, 1);
XGpioPs_SetOutputEnablePin(&Gpio, LED_B, 1);
while (1) {
XGpioPs_WritePin(&Gpio, LED_R, LED_ON);
delay(1000);
XGpioPs_WritePin(&Gpio, LED_G, LED_ON);
delay(1000);
XGpioPs_WritePin(&Gpio, LED_B, LED_ON);
delay(1000);
XGpioPs_WritePin(&Gpio, LED_R, LED_OFF);
delay(1000);
XGpioPs_WritePin(&Gpio, LED_G, LED_OFF);
delay(1000);
XGpioPs_WritePin(&Gpio, LED_B, LED_OFF);
delay(1000);
}
cleanup_platform();
}
类似MIO方式(都为PS部分GPIO操作),设置为输出并设置输出使能,但要注意这里的GPIO号是从54开始的3个。
IP方式实现GPIO
vivado中zynq设置如下图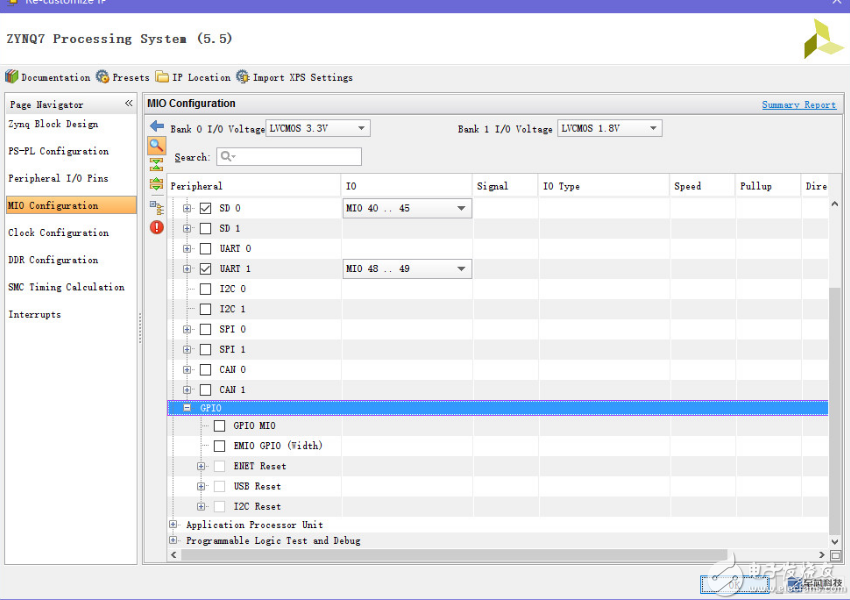
图中可知GPIO中MIO和EMIO都不选择,但要打开M_AXI_GP接口(这里选择M_AXI_GP0)和复位管脚,如下图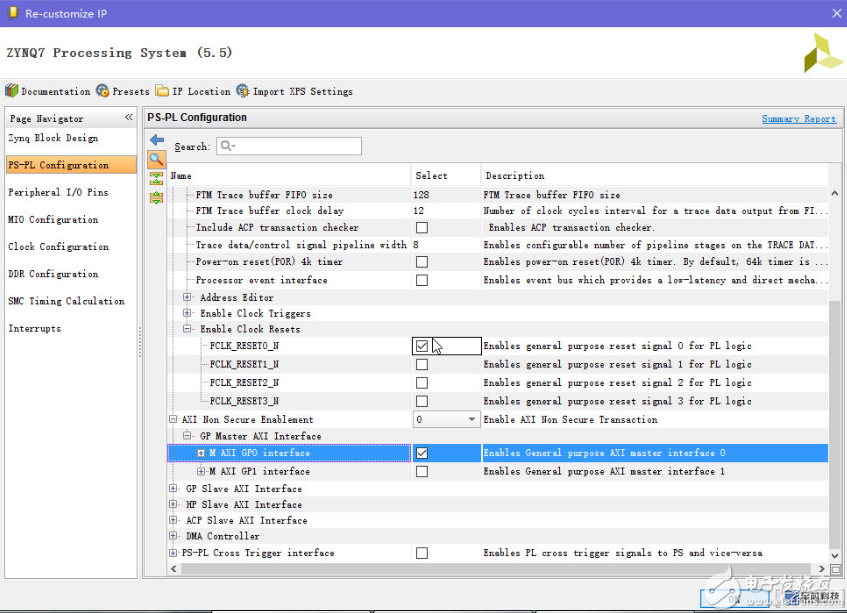
当然用到了PL部分逻辑则至少需要一个时钟输出到PL部分,这里选择FCLK_CLK0输出50MHz,如下图
推荐加入zynq后,不要自动连接,再加入gpio并位宽设置为3,具体设置如下图
GPIO设置好后,再点击上面的蓝色字体的自动连接,即可得到上面的连接,这样可以减少手动连接量。
最后vivado中连接如下图
与EMIO类似需要将顶层三个GPIO管脚要绑定到芯片对应管脚上。
软件部分如下
#include
#include "platform.h"
#include "xgpio.h"
#define AXI_GPIO_DEVICE_ID XPAR_GPIO_0_DEVICE_ID
#define XGPIO_BANK1 1
#define XGPIO_BANK2 2
#define LED34_R_PIN 0x01
#define LED34_G_PIN 0x02
#define LED34_B_PIN 0x04
static void delay(int dly)
{
int i, j;
for (i = 0; i < dly; i++) {
for (j = 0; j < 0xffff; j++) {
;
}
}
}
int main()
{
XGpio_Config *XGpioCfg;
XGpio XGpio;
int Status;
init_platform();
XGpioCfg = XGpio_LookupConfig(AXI_GPIO_DEVICE_ID);
Status = XGpio_CfgInitialize(&XGpio, XGpioCfg, XGpioCfg->BaseAddress);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
XGpio_SetDataDirection(&XGpio, XGPIO_BANK1, ~(LED34_R_PIN | LED34_G_PIN | LED34_B_PIN));
XGpio_DiscreteWrite(&XGpio, XGPIO_BANK1, LED34_R_PIN | LED34_G_PIN | LED34_B_PIN);
while (1) {
XGpio_DiscreteWrite(&XGpio, XGPIO_BANK1, ~LED34_R_PIN);
delay(1000);
XGpio_DiscreteWrite(&XGpio, XGPIO_BANK1, ~(LED34_R_PIN | LED34_G_PIN));
delay(1000);
XGpio_DiscreteWrite(&XGpio, XGPIO_BANK1, ~(LED34_R_PIN | LED34_G_PIN | LED34_B_PIN));
delay(1000);
XGpio_DiscreteWrite(&XGpio, XGPIO_BANK1, ~(LED34_G_PIN | LED34_B_PIN));
delay(1000);
XGpio_DiscreteWrite(&XGpio, XGPIO_BANK1, ~(LED34_B_PIN));
delay(1000);
XGpio_DiscreteWrite(&XGpio, XGPIO_BANK1, LED34_R_PIN | LED34_G_PIN | LED34_B_PIN);
delay(1000);
}
cleanup_platform();
return 0;
}
这里实现的功能与EMIO方式中功能相同,当时IP方式中为PL部分实现的GPIO,所以调用的函数与前面两种GPIO实现函数不同,注意包含的GPIO头文件,前两种是#include "xgpiops.h"而这最后一种为#include "xgpio.h"
总结
MIO和EMIO方式使用PS部分的GPIO模块,其中MIO方式不占用PL部分资源,其输出管脚只能为固定的54个(而且要在未被其它外设使用的情况下),EMIO方式会占用PL的管脚资源,其管脚可在PL部分任意选择(除特殊功能管脚),IP方式除了占用PL部分管脚资源外还会占用PL部分逻辑资源,所以其GPIO功能在PL部分实现其调用函数也和前两种不同,最后EMIO和IP方式在vivado都需要绑定管脚。
- 相关推荐
-
STM32实现复位的三种常用方式问题2021-08-12 0
-
单片机流水灯的三种实现方式2021-11-18 0
-
详细解读Zynq的三种启动方式(JTAG,SD,QSPI)2017-11-10 14302
-
ZYNQ 的三种GPIO :MIO、EMIO、AXI2017-02-08 3335
-
被zynq的GPIO唬住,告诉你zynq的3种GPIO2018-07-07 5254
-
Xilinx ZYNQ开发GPIO的三种方式:MIO、EMIO、AXI_GPIO2020-12-26 3969
-
伺服电机的三种控制方式该如何应用2020-12-14 5418
-
如何应用伺服电机的三种控制方式2021-01-22 1748
-
FPGA、Zynq和Zynq MPSoC三种器件的特点介绍2021-04-02 16438
-
伺服电机的三种控制方式2022-08-17 7131
-
Redis实现限流的三种方式分享2023-02-22 1101
-
FPGA中三种常用复位电路2023-05-14 2639
-
STM32使用GPIO配置的5种方式2023-10-26 1513
-
光伏发电系统中三种DC-DC转换电路的研究2023-11-06 277
-
分布式锁的三种实现方式2023-12-28 931
全部0条评论

快来发表一下你的评论吧 !
